SH1NZ33
-
Compteur de contenus
19 -
Inscrit(e) le
-
Dernière visite
Récompenses de SH1NZ33
")





-
Idem, à part deux ou vidéos sur le montage, quid des retours d'expériences ? Et sur une D12 230 ça ne fera pas trop lourd ?
-
Oui j'ai le même problème même en modifiant le vref comme conseillé sur le très bon tuto de LudoLab. Pour ma part ce sont les titans de base et ils font tous les deux ce bruit "douteux" mais qui reste quand même moins pénible que le son aigu provoqués par les anciens drivers. Je vais bientôt recevoir un BMG mais c'est ce que tu as et ça semble pareil à ce niveau d'après ton retour d'expérience... Tu chasses un bruit pour en découvrir un autre qui était "masqué" par le plus fort ^^ Sinon pourquoi pas tenter l'ajout de silent-block, et concernant les "TL-Smoother" (cf tuto de GüeroLoco) je crois que ça n'est pas nécessaire puisque les TMC 2209 font déjà le taf (corrigez-moi si c'est faux) J'ai également opté pour un ventilo Noctua 12V (avec un rabaisseur de tension) sur la carte mère et je compte faire pareil sur ceux présents sur le hotend quitte à passer par un autre fan duct si besoin, c'est pas les modèles qui manquent
-
Et bien celui de NeoprodFX est mieux que celui d'origine, c'est déjà très bien, mais je voulais tester d'autres fonctionnalités, d'où le passage à Molise. Pour l'instant j'en suis bien content mais bizarrement pas beaucoup de tuto vidéo (rien pour la D12 sauf erreur)... Ce que l'on perd avec Molise (pas de mode graphique, plus de wifi, plus d'aperçus) est largement compensé par les nouvelles fonctions principales suivantes : Le support du changement de filament en cours de print (M600), le chargement/déchargement de filament assisté Différents modes de leveling (Automatique / Mesh Bed Leveling, Level Corner with Probe), Z Offset Auto Le support du M117 (affichage de texte), du M73 L'extinction automatique de l'écran Une meilleure communication entre l'Octoprint et l'imprimante. Par exemple lors d'une impression via Octoprint, on peut voir la progression de l'impression depuis l'écran de l'imprimante et mettre en pause/arrêter. En firmware "traditionnel" ou celui de NeoprodFX, lors de l'impression par Octoprint l'imprimante semble "en repos" sur l'écran LCD alors que ce n'est pas le cas... D'autant plus que : les aperçus sont "récupérables" via le plugin Slicer Thumbnails le wifi est géré directement par Octoprint (et bien meilleur que le wifi de l'imprimante) Pour le M117, le plugin DisplayLayerProgress Plugin permet d'avoir encore plus de détail sur l'écran de l'imprimante. Lien de Molise pour la D12 : GitHub Les firmwares déjà compilés sont disponibles ICI Sinon j'ai compilé une version française pour ma config (D12-230-DUAL-BLTouch-Full TMC2209:X+Y+Z+E1+E2) disponible ICI si ça peut vous éviter de devoir passer par la case compilation.
-
Hello, désolé de n'avoir pas répondu plus tôt. En effet il y a un bug sur la génération du thumbnail de l'impression alors que celui du choix du print fonctionne. Merci @nEricB pour le fix par contre je suis passé au firmware Molise + Octoprint depuis, donc pas en mesure de vérifier si le bug est corrigé.
-
Tests concluants, Octolapse + Galaxy S8 j'ai de beaux timelapses quasi professionnels et en plus mon raspicam me permet d'avoir une visu plus globale en plus J'ai réalisé un tuto détaillé au passage, c'est pas spécifique à la D12 donc il est dans un autre endroit du forum :
-
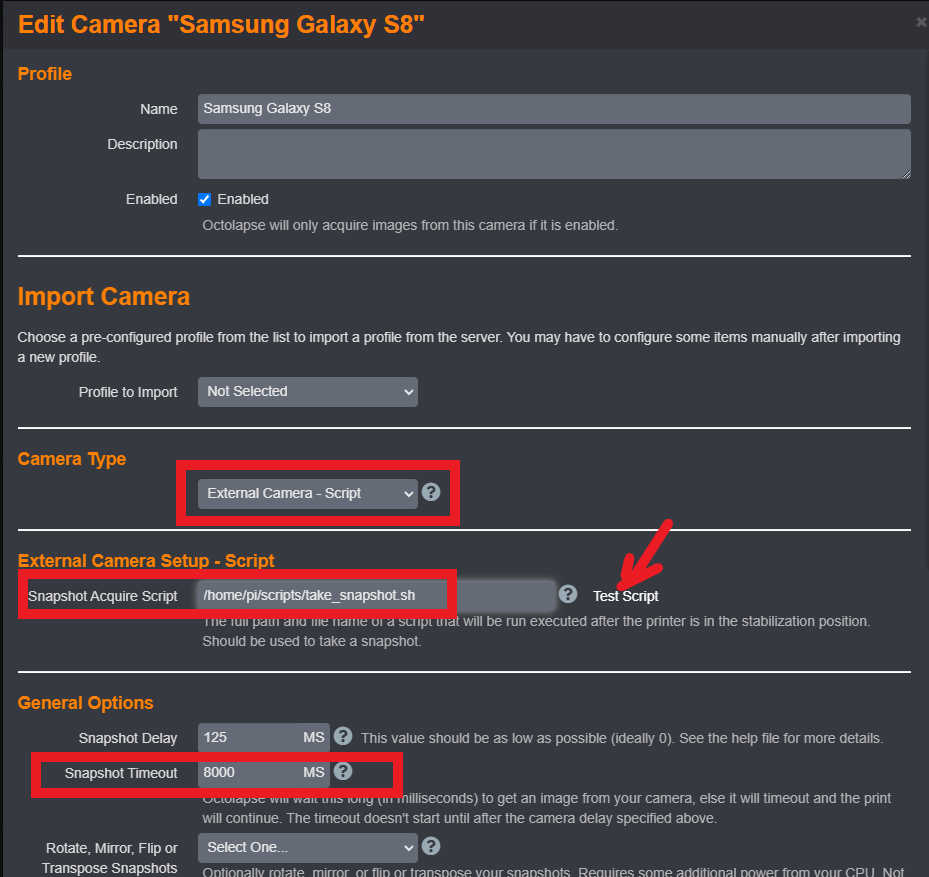
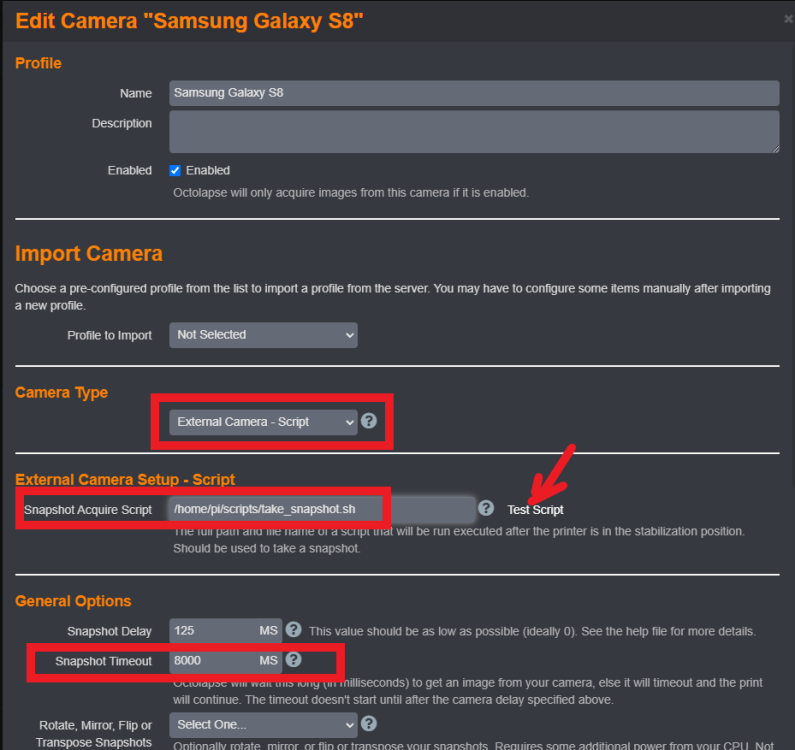
 Hello, Il existe de nombreux tutos Octolapse pour des appareils photos (DSLR, etc) et webcams via l'excellent outil GPhoto2 mais pas grand chose pour les appareils Android non supportés. Dans mon cas il s'agit d'un Samsung Galaxy S8. La solution proposée dans ce tuto consiste à prendre des photos à l'aide des commandes ADB (Android Debug Bridge) via un script assez similaire à celui de GPhoto2. Pour rappel, un appareil Android branché en USB peut se mettre dans différents modes (PTP, MTP, charge uniquement, etc). Un spécifique et caché par défaut permet d'envoyer certaines commandes pour différentes actions sur l'appareil (copie de fichiers, execution/arrets/(des)installations de programmes, etc) sans le manipuler directement. C'est le mode "Débogage USB" et c'est grâce à ce mode que l'on va pouvoir prendre les photos. Avant toutes choses, l'éxecution de commandes ADB n'est pas sans risques pour votre appareil. Ni ce forum, ni moi ne peuvent être tenu responsables des éventuels problèmes rencontrés. Pensez à effectuer une sauvegarde de vos données personnelles sur votre appareil Android avant d'aller plus loin ! 1. Activer le mode "Débogage USB" Ce mode est activable dans le menu "développeur", menu caché par défaut, comme précisé dans ce tutoriel. Plus de détail ICI 2. Installer ADB sur le PI : sudo apt-get install adb 3. Brancher l'appareil Android sur le PI via le câble USB. Si le mode Débogage USB est activé, une fenêtre d'autorisation doit apparaître : Il faut valider et pour éviter d'avoir cette fenêtre à chaque fois, cocher pour mémoriser le choix. 4. Vérifier la commande ADB pour l'ouverture du logiciel de la capture photo taper la ligne suivante : adb shell am start -a android.media.action.IMAGE_CAPTURE Dans le cas de mon téléphone, l'application native s'ouvre par contre je n'ai pas la possibilité d'enregistrer de photos (une spécificité Samsung ?). Il faut utiliser la commande suivante à la place : adb shell "am start -a android.media.action.STILL_IMAGE_CAMERA" Si un logiciel par défaut est défini, il va s'ouvrir automatiquement. Sinon un choix doit être proposé (avec la possibilité de mémoriser le choix). Dans le logiciel de prise de photo, il faut également vérifier où sont stoquées les photos prises. Par exemple : ► Carte SD : /storage/0000-0000/DCIM/Camera ► Mémoire interne : /sdcard/DCIM/Camera Les photos sont nommées de cette manière : YYYYMMDD_HHMMSS.jpg (YYYY: année, MM : mois, etc) mais ça dépend du logiciel utilisé Cette étape est importante car il faudra définir le bon emplacement dans le script. 5. La création du script Le script est composé en trois parties, la première et la dernière sont du copier/coller du script utilisé par GPhoto2 : Partie 1 (début) : #!/bin/bash # Put the arguments sent by Octolapse into variables for easy use SNAPSHOT_NUMBER=$1 #... an integer value that increments after each successful snapshot DELAY_SECONDS=$2 #..... the camera delay in seconds DATA_DIRECTORY=$3 #.... the path to the Octolapse data folder SNAPSHOT_DIRECTORY=$4 # the path to the current camera's snapshot folder for the current print job.may not exist so be $SNAPSHOT_FILENAME=$5 #. the expected file name of the snapshot after it has been taken SNAPSHOT_FULL_PATH=$6 # the full path and filename of the expected snapshot.If this file exists after the script has re$ # Check to see if the snapshot directory exists if [ ! -d "${SNAPSHOT_DIRECTORY}" ]; then echo "Creating directory: ${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}/fullres" fi Il faudra juste rajouter le chemin où sont stoquées les photos: cam_path='/sdcard/DCIM/Camera' Partie 3 (fin): if [ ! -f "${SNAPSHOT_FULL_PATH}" ]; then echo "The snapshot was not found in the expected directory: '${SNAPSHOT_FULL_PATH}'." >&2 exit 1 fi La partie 2 consiste à lancer les commandes ADB adéquates pour prendre la photo et la déplacer dans le dossier d'Octolapse. En fonction de l'appareil Android et du logiciel de photo utilisé, les commandes et délais d'attentes peuvent varier. Il faudra tester et adapter si besoin. Voici les différentes commandes qui peuvent servir : adb shell "input keyevent KEYCODE_WAKEUP" #...................... déverrouillage adb shell "input keyevent KEYCODE_SLEEP" #........................ verrouillage adb shell "input keyevent KEYCODE_HOME" #......................... écran d'accueil adb shell "input keyevent KEYCODE_CAMERA" #....................... prise de la photo adb shell "input keyevent KEYCODE_FOCUS" #........................ focus manuel avant de prendre une photo adb shell "am start -a android.media.action.IMAGE_CAPTURE" #...... ouverture de l'application photo par défaut adb shell "am start -a android.media.action.STILL_IMAGE_CAMERA" #. ouverture de l'application photo par défaut adb shell "am force-stop com.sec.android.app.camera" #............ fermeture de l'application photo adb shell ls #.................................................... la fonction "ls" classique avec tous les paramètres possibles adb pull $FullFileName #.......................................... copier de fichier(s) adb shell rm $FullFileName #...................................... suppression de fichier(s) Par exemple, pour l'application native du Galaxy S8, la prise de photo peut s'enclencher via ce script : adb shell "input keyevent KEYCODE_WAKEUP" adb shell "am start -a android.media.action.STILL_IMAGE_CAMERA" sleep 1 adb shell "input keyevent KEYCODE_CAMERA" sleep 3 adb shell "am force-stop com.sec.android.app.camera" adb shell "input keyevent KEYCODE_SLEEP" Il est important de rajouter quelques secondes (sleep) pour laisser le temps à l'appareil de lancer l'application et prendre la photo. Dans cet exemple le "profil" utilisé est le mode "automatique" et ne permet pas un réglage "aux petits oignons". C'est économe puisque le téléphone se verrouille (écran s'éteint) une fois la tâche terminée mais ça prend plus de temps (ce qui nécessitera de rallonger le paramètre Snapshot Timeout dans Octolapse) Un autre exemple, via une application rajoutée (DLSR Camera Professional) permettant un mode plus "pro" et rapide (mais moins économe). On part du principe que l'application est déjà ouverte, l'utilisateur a effectué tous les réglages désirés (ISO, Focus, exposition, zoom, etc). La prise de photo se réduit à deux lignes : adb shell "input keyevent KEYCODE_CAMERA" sleep 3 Encore une fois, cette partie dépend du matériel (si assez rapide, on peut passer à un "sleep 2" par exemple), du logiciel utilisé et de comment on veut prendre les photos. Ensuite, pour le déplacement de la photo de l'appareil Android sur le PI, j'ai choisi la méthode suivante : last_file=$(adb shell ls -1t $cam_path | head -1) Cette instruction permet de retrouver le dernier fichier présent dans le dossier $cam_path, soit théoriquement la dernière photo, si tout fonctionne correctement... Le déplacement de la photo s'effectue en 2 temps : 1. La copie sur le PI (+ renommage): cd "${SNAPSHOT_DIRECTORY}" # ............. choix du dossier adb pull $cam_path/$last_file # .......... copie de la photo mv $last_file "${SNAPSHOT_FILENAME}" # ... renommage du fichier 2. La suppression sur l'appareil Android : adb shell rm $cam_path/$last_file Bien que fonctionnel, ce n'est pas parfait car si pour X raisons la photo n'a pas été prise correctement, le script en l'état va prendre le dernier fichier (donc pas la photo attendue) et va la copier et la supprimer sur l'appareil Android. Raison pour laquelle il vaut mieux lancer ce script dans un dossier vide par défaut histoire de ne pas faire de bêtises sur des photos précédentes ^^ L'idéal serait de s'assurer préalablement que la photo a été correctement prise. Par exemple en faisant ressortir le dernier fichier datant de moins de 10s et s'il n'y en a pas, alors ça veut dire que la photo n'a pas été prise. Je n'ai pas encore trouvé de solution à ce niveau via une commande "adb shell ls..." mais peut-être que quelqu'un aura la bonne idée pour compléter ce tuto et proposer une méthode plus "secure". Le script complet dans mon cas est le suivant : #!/bin/bash # Put the arguments sent by Octolapse into variables for easy use SNAPSHOT_NUMBER=$1 #... an integer value that increments after each successful snapshot DELAY_SECONDS=$2 #..... the camera delay in seconds DATA_DIRECTORY=$3 #.... the path to the Octolapse data folder SNAPSHOT_DIRECTORY=$4 # the path to the current camera's snapshot folder for the current print job.may not exist so be $SNAPSHOT_FILENAME=$5 #. the expected file name of the snapshot after it has been taken SNAPSHOT_FULL_PATH=$6 # the full path and filename of the expected snapshot.If this file exists after the script has re$ cam_path='/sdcard/DCIM/DSLRCamera' # Check to see if the snapshot directory exists if [ ! -d "${SNAPSHOT_DIRECTORY}" ]; then echo "Creating directory: ${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}/fullres" fi adb shell "input keyevent KEYCODE_CAMERA" sleep 3 cd "${SNAPSHOT_DIRECTORY}" adb pull $cam_path/$last_file mv $last_file "${SNAPSHOT_FILENAME}" adb shell rm $cam_path/$last_file if [ ! -f "${SNAPSHOT_FULL_PATH}" ]; then echo "The snapshot was not found in the expected directory: '${SNAPSHOT_FULL_PATH}'." >&2 exit 1 fi La création du script peut s'effectuer va la commande suivante (dans le dossier /home/pi ou /scripts/ par exemple): nano take_snapshot.sh puis faire un copier/coller du script et enregistrer. Ensuite il faudra le rendre executable via la commande: sudo chmod +x take_snapshot.sh Enfin, dans le module d'Octolapse, créer un nouveau profile de caméra de type "External camera script", en précisant le script (le chemin complet) et éventuellement ajuster le Timeout : Reste à tester le script via le lien idoine (cf flèche sur l'image ci-dessus) et s'assurer qu'il n'y a pas d'erreurs. Vos retours sont les bienvenus ☺
Hello, Il existe de nombreux tutos Octolapse pour des appareils photos (DSLR, etc) et webcams via l'excellent outil GPhoto2 mais pas grand chose pour les appareils Android non supportés. Dans mon cas il s'agit d'un Samsung Galaxy S8. La solution proposée dans ce tuto consiste à prendre des photos à l'aide des commandes ADB (Android Debug Bridge) via un script assez similaire à celui de GPhoto2. Pour rappel, un appareil Android branché en USB peut se mettre dans différents modes (PTP, MTP, charge uniquement, etc). Un spécifique et caché par défaut permet d'envoyer certaines commandes pour différentes actions sur l'appareil (copie de fichiers, execution/arrets/(des)installations de programmes, etc) sans le manipuler directement. C'est le mode "Débogage USB" et c'est grâce à ce mode que l'on va pouvoir prendre les photos. Avant toutes choses, l'éxecution de commandes ADB n'est pas sans risques pour votre appareil. Ni ce forum, ni moi ne peuvent être tenu responsables des éventuels problèmes rencontrés. Pensez à effectuer une sauvegarde de vos données personnelles sur votre appareil Android avant d'aller plus loin ! 1. Activer le mode "Débogage USB" Ce mode est activable dans le menu "développeur", menu caché par défaut, comme précisé dans ce tutoriel. Plus de détail ICI 2. Installer ADB sur le PI : sudo apt-get install adb 3. Brancher l'appareil Android sur le PI via le câble USB. Si le mode Débogage USB est activé, une fenêtre d'autorisation doit apparaître : Il faut valider et pour éviter d'avoir cette fenêtre à chaque fois, cocher pour mémoriser le choix. 4. Vérifier la commande ADB pour l'ouverture du logiciel de la capture photo taper la ligne suivante : adb shell am start -a android.media.action.IMAGE_CAPTURE Dans le cas de mon téléphone, l'application native s'ouvre par contre je n'ai pas la possibilité d'enregistrer de photos (une spécificité Samsung ?). Il faut utiliser la commande suivante à la place : adb shell "am start -a android.media.action.STILL_IMAGE_CAMERA" Si un logiciel par défaut est défini, il va s'ouvrir automatiquement. Sinon un choix doit être proposé (avec la possibilité de mémoriser le choix). Dans le logiciel de prise de photo, il faut également vérifier où sont stoquées les photos prises. Par exemple : ► Carte SD : /storage/0000-0000/DCIM/Camera ► Mémoire interne : /sdcard/DCIM/Camera Les photos sont nommées de cette manière : YYYYMMDD_HHMMSS.jpg (YYYY: année, MM : mois, etc) mais ça dépend du logiciel utilisé Cette étape est importante car il faudra définir le bon emplacement dans le script. 5. La création du script Le script est composé en trois parties, la première et la dernière sont du copier/coller du script utilisé par GPhoto2 : Partie 1 (début) : #!/bin/bash # Put the arguments sent by Octolapse into variables for easy use SNAPSHOT_NUMBER=$1 #... an integer value that increments after each successful snapshot DELAY_SECONDS=$2 #..... the camera delay in seconds DATA_DIRECTORY=$3 #.... the path to the Octolapse data folder SNAPSHOT_DIRECTORY=$4 # the path to the current camera's snapshot folder for the current print job.may not exist so be $SNAPSHOT_FILENAME=$5 #. the expected file name of the snapshot after it has been taken SNAPSHOT_FULL_PATH=$6 # the full path and filename of the expected snapshot.If this file exists after the script has re$ # Check to see if the snapshot directory exists if [ ! -d "${SNAPSHOT_DIRECTORY}" ]; then echo "Creating directory: ${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}/fullres" fi Il faudra juste rajouter le chemin où sont stoquées les photos: cam_path='/sdcard/DCIM/Camera' Partie 3 (fin): if [ ! -f "${SNAPSHOT_FULL_PATH}" ]; then echo "The snapshot was not found in the expected directory: '${SNAPSHOT_FULL_PATH}'." >&2 exit 1 fi La partie 2 consiste à lancer les commandes ADB adéquates pour prendre la photo et la déplacer dans le dossier d'Octolapse. En fonction de l'appareil Android et du logiciel de photo utilisé, les commandes et délais d'attentes peuvent varier. Il faudra tester et adapter si besoin. Voici les différentes commandes qui peuvent servir : adb shell "input keyevent KEYCODE_WAKEUP" #...................... déverrouillage adb shell "input keyevent KEYCODE_SLEEP" #........................ verrouillage adb shell "input keyevent KEYCODE_HOME" #......................... écran d'accueil adb shell "input keyevent KEYCODE_CAMERA" #....................... prise de la photo adb shell "input keyevent KEYCODE_FOCUS" #........................ focus manuel avant de prendre une photo adb shell "am start -a android.media.action.IMAGE_CAPTURE" #...... ouverture de l'application photo par défaut adb shell "am start -a android.media.action.STILL_IMAGE_CAMERA" #. ouverture de l'application photo par défaut adb shell "am force-stop com.sec.android.app.camera" #............ fermeture de l'application photo adb shell ls #.................................................... la fonction "ls" classique avec tous les paramètres possibles adb pull $FullFileName #.......................................... copier de fichier(s) adb shell rm $FullFileName #...................................... suppression de fichier(s) Par exemple, pour l'application native du Galaxy S8, la prise de photo peut s'enclencher via ce script : adb shell "input keyevent KEYCODE_WAKEUP" adb shell "am start -a android.media.action.STILL_IMAGE_CAMERA" sleep 1 adb shell "input keyevent KEYCODE_CAMERA" sleep 3 adb shell "am force-stop com.sec.android.app.camera" adb shell "input keyevent KEYCODE_SLEEP" Il est important de rajouter quelques secondes (sleep) pour laisser le temps à l'appareil de lancer l'application et prendre la photo. Dans cet exemple le "profil" utilisé est le mode "automatique" et ne permet pas un réglage "aux petits oignons". C'est économe puisque le téléphone se verrouille (écran s'éteint) une fois la tâche terminée mais ça prend plus de temps (ce qui nécessitera de rallonger le paramètre Snapshot Timeout dans Octolapse) Un autre exemple, via une application rajoutée (DLSR Camera Professional) permettant un mode plus "pro" et rapide (mais moins économe). On part du principe que l'application est déjà ouverte, l'utilisateur a effectué tous les réglages désirés (ISO, Focus, exposition, zoom, etc). La prise de photo se réduit à deux lignes : adb shell "input keyevent KEYCODE_CAMERA" sleep 3 Encore une fois, cette partie dépend du matériel (si assez rapide, on peut passer à un "sleep 2" par exemple), du logiciel utilisé et de comment on veut prendre les photos. Ensuite, pour le déplacement de la photo de l'appareil Android sur le PI, j'ai choisi la méthode suivante : last_file=$(adb shell ls -1t $cam_path | head -1) Cette instruction permet de retrouver le dernier fichier présent dans le dossier $cam_path, soit théoriquement la dernière photo, si tout fonctionne correctement... Le déplacement de la photo s'effectue en 2 temps : 1. La copie sur le PI (+ renommage): cd "${SNAPSHOT_DIRECTORY}" # ............. choix du dossier adb pull $cam_path/$last_file # .......... copie de la photo mv $last_file "${SNAPSHOT_FILENAME}" # ... renommage du fichier 2. La suppression sur l'appareil Android : adb shell rm $cam_path/$last_file Bien que fonctionnel, ce n'est pas parfait car si pour X raisons la photo n'a pas été prise correctement, le script en l'état va prendre le dernier fichier (donc pas la photo attendue) et va la copier et la supprimer sur l'appareil Android. Raison pour laquelle il vaut mieux lancer ce script dans un dossier vide par défaut histoire de ne pas faire de bêtises sur des photos précédentes ^^ L'idéal serait de s'assurer préalablement que la photo a été correctement prise. Par exemple en faisant ressortir le dernier fichier datant de moins de 10s et s'il n'y en a pas, alors ça veut dire que la photo n'a pas été prise. Je n'ai pas encore trouvé de solution à ce niveau via une commande "adb shell ls..." mais peut-être que quelqu'un aura la bonne idée pour compléter ce tuto et proposer une méthode plus "secure". Le script complet dans mon cas est le suivant : #!/bin/bash # Put the arguments sent by Octolapse into variables for easy use SNAPSHOT_NUMBER=$1 #... an integer value that increments after each successful snapshot DELAY_SECONDS=$2 #..... the camera delay in seconds DATA_DIRECTORY=$3 #.... the path to the Octolapse data folder SNAPSHOT_DIRECTORY=$4 # the path to the current camera's snapshot folder for the current print job.may not exist so be $SNAPSHOT_FILENAME=$5 #. the expected file name of the snapshot after it has been taken SNAPSHOT_FULL_PATH=$6 # the full path and filename of the expected snapshot.If this file exists after the script has re$ cam_path='/sdcard/DCIM/DSLRCamera' # Check to see if the snapshot directory exists if [ ! -d "${SNAPSHOT_DIRECTORY}" ]; then echo "Creating directory: ${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}" mkdir -p "${SNAPSHOT_DIRECTORY}/fullres" fi adb shell "input keyevent KEYCODE_CAMERA" sleep 3 cd "${SNAPSHOT_DIRECTORY}" adb pull $cam_path/$last_file mv $last_file "${SNAPSHOT_FILENAME}" adb shell rm $cam_path/$last_file if [ ! -f "${SNAPSHOT_FULL_PATH}" ]; then echo "The snapshot was not found in the expected directory: '${SNAPSHOT_FULL_PATH}'." >&2 exit 1 fi La création du script peut s'effectuer va la commande suivante (dans le dossier /home/pi ou /scripts/ par exemple): nano take_snapshot.sh puis faire un copier/coller du script et enregistrer. Ensuite il faudra le rendre executable via la commande: sudo chmod +x take_snapshot.sh Enfin, dans le module d'Octolapse, créer un nouveau profile de caméra de type "External camera script", en précisant le script (le chemin complet) et éventuellement ajuster le Timeout : Reste à tester le script via le lien idoine (cf flèche sur l'image ci-dessus) et s'assurer qu'il n'y a pas d'erreurs. Vos retours sont les bienvenus ☺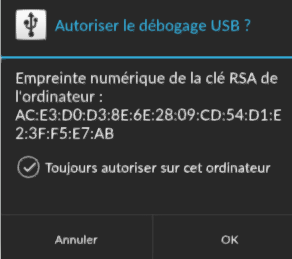
-
- 2
-

-
- script
- smartphone
- (et 3 en plus)
-
Merci pour la réponse. A défaut d'une solution simple et efficace, j'ai préféré en racheter une autre directement flashée en Tasmota. Je confirme que ça marche au poil, toutes les prises devraient avoir ce firmware tellement c'est mieux ! Concernant Octolapse, j'ai pris une raspicam V2 + nappe de 2M + une lampe "ring light", le tout montés sur trépied. Ca marche mais je m'attendais à une qualité un peu meilleure pour un 5MPixels. Au delà de 1920x1080 ça upscale plus qu'autre chose J'ai testé également avec un Galaxy S8 (on continue avec le méthodes du pauvre ^^). Le capteur est de bien meilleure qualité puisqu'on peut monter jusqu'à 12MPixels. Appareil non supporté par GPhoto2, aussi bien en mode PTP ou MTP, dommage ! Avec DroidCamX ça marche quand-même. En passant par des commandes ADB pour prendre les photos et les transférer dans le dossier d'OctoLapse, on pourrait même ne pas avoir besoin de DroidCamX ( via "external camera - script" dans les profils d'Octolapse) Les premiers essais sont concluants (déverrouillage du tel + prise de photo + copie sur la carte SD du raspi). Reste à savoir où stocker la photos, le nom, etc pour que ça soit reconnu dans Octolapse...
-
Il devait y avoir un conflit avec un autre plugin car désormais Octolapse ne plante plus et l'upload direct (pas sur carte SD) est aussi rapide que sous Cura. Les prints étaient parasités par des "blips" causés par de petites pauses aléatoires et c'était à cause d'Octoprint qui devait lagguer avec la multitude de plugins installés. Maintenant c'est nickel. Reste plus que la prise Tuya si vous avez une astuce récente qui marche
-
Hello, Je viens de me mettre également à Octoprint sur la Wanhao D12 via un Raspberry Pi 3 et d'occasion car avec la pénurie de l'électronique, le prix des V4 a explosé, c'est juste du vol Même si ce n'est pas un foudre de guerre, ca tourne très bien, même avec un PiHole déjà installé dessus (très bon outil au passage). Le processeur n'est pas trop sollicité et le tout est dans un boitier imprimé, bien ventilé (noctua + pate thermique + dissipateurs). Ca ne chauffe quasiment pas (entre 30 et 40° max). L'installation d'Octoprint a été réalisée en ligne de commande et sans encombres. Par contre j'avais un message d'alerte de ce type : "WARNING - Cannot parse '/usr/bin/vcgencmd get_throttled' output: VCHI initialization failed. Make sure the system user 'octoprint' is in the 'video' group". Problème réglé à l'aide de cette page : https://chewett.co.uk/blog/258/vchi-initialization-failed-raspberry-pi-fixed/ Pour commencer, il ne semble pas y avoir de profils déjà existants pour cette imprimante D12. Le paramétrage manuel n'est pas compliqué mais c'est étonnant qu'il n'y ai pas de possibilité de télécharger ces profils depuis un cloud (via un plugin ou autre). Ou bien j'ai loupé un truc ? L'installation des plugins est aisée (Marlin EEprom Editor, Octolapse, Themeify, UI Customizer, PrettyGCode, Dashboard, etc), par contre le support en français n'est pas présent de partout c'est dommage N'ayant pas de WebCam, vous allez rire, je me sers pour l'instant d'un vieux Wiko Lenny 8 (Android 4) monté sur un trépied avec l'application DroidCam (version 6.5.1 car les versions plus récentes ne fonctionnent plus sous android 4). Pas de souci pour le faire fonctionner en Timelapse classique ("xxx.xxx.xxx.xxx:xxxx/cam/1/frame.jpg" pour prendre un snapshot, pareil mais "/mjpegfeed?960x720" pour le mode streaming et "/cam/1/led_toggle" pour switcher la torche). La qualité n'est pas folle vu l'âge de ce dinosaure mais ça dépanne on va dire et je pense qu'avec des smartphones moins anciens (S8, etc), certains en 4K, on doit pouvoir se rapprocher d'une webcam récente (version DroidCamX pour passer en HD). En revanche ça coince avec Octolapse. Le test du snapshot fonctionne pourtant et même en changeant de profil (not selected / webcam default octopi), j'ai un message d'erreur. Idem, pas de profiles téléchargeables via le bouton "update profiles", celui avec l'image "d'un nuage", ça ne marche manifestement pas... Je testerai prochainement une camera pi en espérant qu'elle soit reconnue facilement pour tenter la réalisation de meilleurs timelapses que ce que propose Octoprint de base. Le smartphone est branché directement sur l'un des ports USB mais j'ai dû prendre la prise secteur officielle du Raspberry. Ses 2.5A fournis sont suffisants pour son alimentation et la recharge du téléphone. Le plugin d'Octoprint fonctionne très bien dans Cura, c'est d'ailleurs le seul moyen que j'ai trouvé actuellement pour uploader rapidement un GCode car, autant via le bouton "Upload" ou "Upload to SD", c'est 30min d'attente alors que sous Cura, c'est 3 à 5 secondes... Si vous connaissez une astuce pour corriger ce problème je suis preneur. Je dispose d'une prise Tuya Wifi mais la récupération de la clé du produit semble impossible malgré les différents tutos présents et ça cette clé, impossible de piloter la prise depuis Octoprint... Est-ce qu'un flash Tamosta permettrait de régler ce problème ? Il semble y avoir un outil Tuya-Convert (https://tasmota.github.io/docs/Tuya-Convert/) mais je n'y connais rien à ce niveau, une aide serait fort appréciable.
-
Hello, Pareil, j'ai un prise Tuya qui marche très bien avec les applis Tuya et Smart Life, mais impossible de choper la clé. J'ai essayé plusieurs méthodes (même sous android via Packet Capture), c'est galère car avec le temps les différents tutos ne marchent plus... Je prendrai bien un TpLink HS100 ou 110 (on en trouve encore en occas) mais manifestement ça ne marche plus avec les derniers firmwares et je suppose que l'appli Kasa ne doit pas fonctionner avec des prises non mise à jour... Quelles marques / références de prise Wifi fonctionnent facilement (IP comme TPLink) en 2020 avec Octoprint ? Sinon se tourner vers des solutions DIY de prises Wifi ?
-
Salut, Il existe plusieurs types de connexions WIFI. La plupart des box récentes proposent du 5 GHz ou du 2.4 GHz et c'est souvent attribué en mode automatique (WIFI associé). Pour ma part j'ai remarqué que seuls les réseaux en 2.4 Ghz sont affichés, ceux en 5 GHz n'apparaissent pas. C'est manifestement dû au module Wifi de l'imprimante (ESP32) qui n'est pas compatible avec ce type de fréquence. Si tu ne vois rien dans la liste des réseaux WIFI, c'est peut-être parce que ta box a défini celle de 5Ghz et du coup l'imprimante ne la voit pas. Pour y remédier il faut dissocier les deux fréquences et tu auras deux connexions WIFI distinctes (celle de 5Gh va probablement se terminer par "-5GHZ"). A noter que séparer les deux réseaux 2,4 Ghz et 5 Ghz n'affecte pas les performances. Si tu ne sais pas comment procéder, tu peux contacter ton opérateur ou bien le faire manuellement de cette manière : Orange (étapes 1 à 4) : Clique ici Free : Clique ici Bouygues : Clique ici SFR : Clique ici
-
Si tu as un firmware pour ton imprimante, rajoute juste la ligne suivante si elle n'est pas présente : >MACHINE_PARAMETER 1 #Online parameter(0: disable, 1: enable)
-
[TUTO] Wanaho D12 - Bien monter son hotend pour éviter fuite et bouchage.
SH1NZ33 en réponse au topic de Jonathan06 dans Wanhao
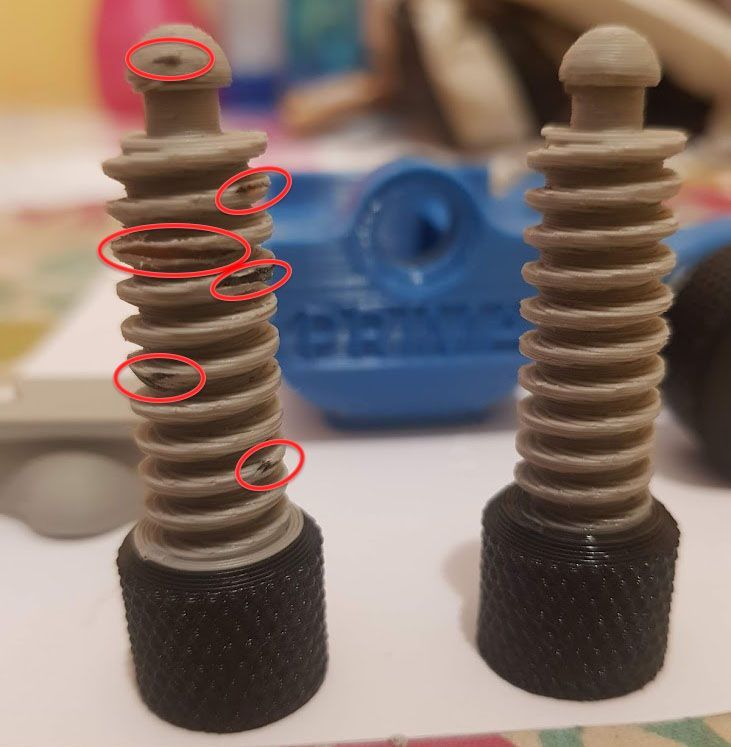
Merci sur ce tuto. Question bête mais mon heatbloc bouge, comment fait-on pour le serrer svp ? J'ai envelé le capot, enlevé les dépots de plastique (fuites) à chaud, retiré la buse, je suppose que je doit tout démonter sauf qu'il faut que ce soit à chaud... On procède comment dans ce cas ? EDIT1 : j'ai démonté, l'ensemble, pour bien serrer le heatbloc je le tourne à fond seulement : - il se retrouve contre le heatbreak alors que dans les images du tuto, il y a un espace entre. - il n'est pas droit mais ne bouge plus Est-ce dangereux ? Edit 2: auto-réponse, c'est pas bon car la chaleur va dans le radiateur et pas possible de monter au-dela de 150°. En fait je viens de comprendre que je ne vissais pas assez la buse, c'est elle qui permet à l'ensemble de ne pas bouger. Du coup j'ai remis de l'espace entre les deux parties. A voir pour le bowden, j'en suis pas ce stade et autant avec du matos tout neuf, propre ça a l'air d'être simple ce tuto, avec du matos bien utilisé/sale (même en essayant d'enlever le maximum), c'est tout autre chose . Une vidéo d'une machine bien utilisée + fuite, ça compléterai ben le tuto, gégé à toi en tous cas Dommage de ne plus pouvoir éditer ses propres messages ça éviterai les doubles posts... C'était bien une histoire de serrage de buse, je n'ai pas eu besoin de modifier le bowden, je pense qu'à l'origine, c'est mis correctement par Wanhao donc la partie du tuto avec le bowden, c'est bon à savoir si tu as un kit neuf non monté sauf erreur, sinon il faut surtout bien visser la buse nettoyée (ou nouvelle, au pris que ça coûte...). Voilà la différence sur la gauche avec les bavures, même en limant au mieux les défauts, c'est moche. Sur la droite sans bavures : Imprimé en dual extruder via PrusaSlicer : couleur définie en rajoutant un modificateur de couleur différente de type "cylindre" sur le bas de la pièce (super pratique pour rajouter facilement de la couleur sur un STL non prévu) + tour de purge ultra fine : 2 couches seulement (activer l'option "sans couches dispersées"). C'est une bonne alternative quand on n'a pas le support du gcode m600

-
Ce paramètre est à la fin du fichier. Le voici, c'est pour la D12 230 avec support BLTouch : #===================Advanced Settings======================================= >cfg_insert_det_module 0 #Assemble power outage module (2:mks ups;1:mks 220det;0:mks pwc) >cfg_have_ups_device 0 # UPS(1:yes;0:no) >cfg_print_over_auto_close 0 # auto-off when print finishes(1:yes£»0:no) >PRINT_FINISHED_COUNT 180 #After the shutdown delay time (unit: second) >cfg_filament_det0_trigger_level 0 #the level signal of outage detection E0 module (1:high level;0:low level) >cfg_filament_det1_trigger_level 0 #the level signal of outage detection E1 module (1:high level;0:low level) >cfg_filament_load_length 500 #the lenght to extrude filament (mm),Max:2000mm >cfg_filament_load_speed 800 #the speed to extrude filament(mm/min) >cfg_filament_load_limit_temperature 200 #It is the minimum temperature to extrude filament . >cfg_filament_unload_length 500 #It is the minimum temperature to extrude filament . >cfg_filament_unload_speed 800 #the speed to retract filament(mm/min) >cfg_filament_unload_limit_temperature 200 #It is the minimum temperature to retract filament . #=========================== Bed Leveling ============================= #Leveling mode settings >cfg_leveling_mode 1 #1:auto-leveling; 0:manual leveling #=========================== Manual Leveling ================================== >cfg_point_number 5 #the point number of manual leveling(3,4,5 point available) #the 5 point location of manual leveling >cfg_point1:28,28 >cfg_point2:200,28 >cfg_point3:200,200 >cfg_point4:28,205 >cfg_point5:115,115 #========================== Auto Leveling =================================== >cfg_auto_leveling_cmd:G28;G29; #the setting of auto-leveling command button #=================== Language settings ========================================== >cfg_language_adjust_type 1 #multi-language(enable:1, disable:0) >cfg_language_type 6 #languages setting,this configuration is valid when "cfg_multiple_language" is disabled. #(simplified Chinese:1; traditional Chinese:2; English:3; Russian:4; Spanish:5;French:6;Italian:7). #==================Display Effect(refer to MKS TFT datasheet)================================= #user-defined function1 >setmenu_func1_display 1 #1:display this button£¬0:no #each command must be separated by semicolon ";" >setmenu_func1:M84; >moreitem_pic_cnt 0 #the number of "more" button #edit command for 1~7 "More" button #each command must be separated by semicolon ";" #each icon command must be less than 200 bytes >moreitem_button1_cmd:G28 X0;G28 Y0;G28 Z0; >moreitem_button2_cmd:G28 X0;G28 Y0;G28 Z0; >moreitem_button3_cmd:G28 X0;G28 Y0;G28 Z0; >moreitem_button4_cmd:G28 X0;G28 Y0;G28 Z0; >moreitem_button5_cmd:G28 X0;G28 Y0;G28 Z0; >moreitem_button6_cmd:G28 X0;G28 Y0;G28 Z0; >moreitem_button7_cmd:G28 X0;G28 Y0;G28 Z0; #the number of "more" button to dispaly on printing interface >morefunc_cnt 0 #button1~button6 function >morefunc1_cmd:G28; >morefunc2_cmd:G28; >morefunc3_cmd:G28; >morefunc4_cmd:G28; >morefunc5_cmd:G28; >morefunc6_cmd:G28; >morefunc7_cmd:G28; #------------------------------------------------------------- ######## Display Customization ########## >cfg_background_color 0x1A1A1A #the color of screen background >cfg_title_color 0xFFFFFF #the color of title text >cfg_btn_bkcolor 0x1A1A1A #Universal button background color >cfg_btn_textcolor 0xFFFFFF #Universal button text color >cfg_back_btn_bkcolor 0xff5449 #Button of Return background color >cfg_back_btn_textcolor 0xFFFFFF #Button of Return text color >cfg_dialog_btn_bkcolor 0xff5449 #Dialog button background color >cfg_dialog_btn_textcolor 0xFFFFFF #Dialog button text color >cfg_btn_text_offset 15 #position of button font offset bottom(unit:pixel) >cfg_screen_display_mode 2 #the style of display on the screen home(0:classic,1:simple,2:retro) >cfg_screen_overturn_180 0x00 #The screen flips 180¡ã (0x00: no flip, 0xEE: flip) #============================= Basic Settings ========================= >MACHINETPYE 0 # 0:Cartesian; 1:DELTA ; 2:COREXY >HAS_TEMP_BED 1 # whether enable the heated bed (disable: 0, enable: 1) >EXTRUDERS 2 #This defines the number of extruders #enable z2. #====2 in 1 out setting=== >SINGLE_NOZZLE 1 #(0:disable;1:enable) >Z2_STEPPER_DRIVERS 0 #1:enable z_dual; 0:disable >Z2_ENDSTOPS 0 #Enable Z-axis double limit; 0:disable; 1:enable; >Z2_USE_ENDSTOP 0 #Z axis second limit interface; 0:useless; 1:Z_MAX; 2:Z_MIN # Travel limits after homing (units are in mm) >X_MIN_POS 0 >Y_MIN_POS 0 >Z_MIN_POS 0 >X_MAX_POS 230 >Y_MAX_POS 230 >Z_MAX_POS 250 # position of hotend for filament change and pause print >FILAMENT_CHANGE_X_POS 5 # X position of hotend for filament change and pause print >FILAMENT_CHANGE_Y_POS 5 # Y position of hotend for filament change and pause print >FILAMENT_CHANGE_Z_ADD 5 # Z addition of hotend (lift) for filament change and pause print #Offset of the second extruders. >HOTEND_OFFSET_X -0 #(in mm) offset of the second hotend on the X axis ,Offsets for the first hotend must be 0.0. >HOTEND_OFFSET_Y -0 #(in mm) offset of the second hotend on the Y axis ,Offsets for the first hotend must be 0.0. #============================== Stepper Motor Settings ============================ #Invert the stepper direction. >INVERT_X_DIR 0 >INVERT_Y_DIR 1 >INVERT_Z_DIR 1 >INVERT_E0_DIR 1 >INVERT_E1_DIR 1 #Movement setting >DEFAULT_X_STEPS_PER_UNIT 80 #Default Axis-X Steps Per Unit (steps/mm) >DEFAULT_Y_STEPS_PER_UNIT 80 #Default Axis-Y Steps Per Unit (steps/mm) >DEFAULT_Z_STEPS_PER_UNIT 400.5 #Default Axis-Z Steps Per Unit (steps/mm) >DEFAULT_E0_STEPS_PER_UNIT 403.17 #Default Axis-E Steps Per Unit (steps/mm) >DEFAULT_E1_STEPS_PER_UNIT 403.17 #Default Axis-E Steps Per Unit (steps/mm) >DEFAULT_X_MAX_FEEDRATE 200 #Default Axis-X Max Feed Rate (mm/s) >DEFAULT_Y_MAX_FEEDRATE 200 #Default Axis-Y Max Feed Rate (mm/s) >DEFAULT_Z_MAX_FEEDRATE 4 #Default Axis-Z Max Feed Rate (mm/s) >DEFAULT_E0_MAX_FEEDRATE 50 #Default Axis-E Max Feed Rate (mm/s) >DEFAULT_E1_MAX_FEEDRATE 50 #Default Axis-E Max Feed Rate (mm/s) >DEFAULT_X_MAX_ACCELERATION 500 #Default Axis-X Max Acceleration (change/s) change = mm/s >DEFAULT_Y_MAX_ACCELERATION 500 #Default Axis-Y Max Acceleration (change/s) change = mm/s >DEFAULT_Z_MAX_ACCELERATION 100 #Default Axis-Z Max Acceleration (change/s) change = mm/s >DEFAULT_E0_MAX_ACCELERATION 1000 #Default Axis-E Max Acceleration (change/s) change = mm/s >DEFAULT_E1_MAX_ACCELERATION 1000 #Default Axis-E Max Acceleration (change/s) change = mm/s >DEFAULT_ACCELERATION 500 #X, Y, Z and E acceleration for printing moves >DEFAULT_RETRACT_ACCELERATION 500 #X, Y, Z and E acceleration for retracts >DEFAULT_TRAVEL_ACCELERATION 500 #X, Y, Z acceleration for travel (non printing) moves >DEFAULT_MINIMUMFEEDRATE 0.0 #minimum feedrate >DEFAULT_MINSEGMENTTIME 20000 #minimum time in microseconds that a movement needs to take if the buffer is emptied. >DEFAULT_MINTRAVELFEEDRATE 0.0 # >DEFAULT_XJERK 8.0 #Default Axis-X Jerk (mm/s) >DEFAULT_YJERK 8.0 #Default Axis-Y Jerk (mm/s) >DEFAULT_ZJERK 0.4 #Default Axis-Z Jerk (mm/s) >DEFAULT_EJERK 5.0 #Default Axis-E Jerk (mm/s) #For Inverting Stepper Enable Pins (0:Low,1:High) >X_ENABLE_ON 0 >Y_ENABLE_ON 0 >Z_ENABLE_ON 0 >E_ENABLE_ON 0 >PULSE_DELAY 5 #Pulse hold time (unit: machine cycle) #============================= Thermal Settings ============================ >TEMP_SENSOR_0 1 #1: 100k thermistor£»-3 : thermocouple with MAX31855 >EXTRUDE_MINTEMP 180 >HEATER_0_MINTEMP 5 >HEATER_0_MAXTEMP 260 >HEATER_1_MINTEMP 5 >HEATER_1_MAXTEMP 260 >BED_MAXTEMP 110 >BED_MINTEMP 5 #======================== Thermal Runaway Protection ======================= >THERMAL_PROTECTION_PERIOD 70 #Seconds;When the machine frequently appears Err7, the current value can be appropriately increased. >THERMAL_PROTECTION_HYSTERESIS 5 #Degrees Celsius >WATCH_TEMP_PERIOD 70 #Seconds;When the machine frequently appears Err5, the current value can be appropriately increased. >WATCH_TEMP_INCREASE 2 #Degrees Celsius >THERMAL_PROTECTION_BED_PERIOD 70 #Seconds;When the machine frequently appears Err7, the current value can be appropriately increased. >THERMAL_PROTECTION_BED_HYSTERESIS 5 #Degrees Celsius >WATCH_BED_TEMP_PERIOD 70 #Seconds;When the machine frequently appears Err6, the current value can be appropriately increased. >WATCH_BED_TEMP_INCREASE 2 #Degrees Celsius # Type of heat manager for extruder. >PIDTEMPE 1 # 1:PID ; 0:bang-bang >DEFAULT_Kp 17.54 # --default >DEFAULT_Ki 0.73 # --default >DEFAULT_Kd 105.35 # --default #Type of heat manager for this heatedBed. >PIDTEMPBED 0 # 1:PID ; 0:bang-bang >DEFAULT_bedKp 10.00 # --default >DEFAULT_bedKi 0.023 # --default >DEFAULT_bedKd 305.4 # --default #============================== Endstop Settings =========================== >MIN_SOFTWARE_ENDSTOPS 1 # 0:axes can move below MIN_POS; 1:axes won't move below MIN_POS. >MAX_SOFTWARE_ENDSTOPS 1 # 0:axes can move below MAX_POS; 1:axes won't move below MIN_POS. # Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup). >X_MIN_ENDSTOP_INVERTING 1 # set to true to invert the logic of the endstop. >Y_MIN_ENDSTOP_INVERTING 1 # set to true to invert the logic of the endstop. >Z_MIN_ENDSTOP_INVERTING 1 # set to true to invert the logic of the endstop. >X_MAX_ENDSTOP_INVERTING 1 # set to true to invert the logic of the endstop. >Y_MAX_ENDSTOP_INVERTING 1 # set to true to invert the logic of the endstop. >Z_MAX_ENDSTOP_INVERTING 1 # set to true to invert the logic of the endstop. >Z_MIN_PROBE_ENDSTOP_INVERTING 1 # set to true to invert the logic of the Z_PROBE endstop. # Specify here all the endstop connectors that are connected to any endstop or probe. >USE_XMIN_PLUG 1 # 1:used; 0:noused >USE_YMIN_PLUG 1 # 1:used; 0:noused >USE_ZMIN_PLUG 1 # 1:used; 0:noused >USE_XMAX_PLUG 0 # 1:used; 0:noused >USE_YMAX_PLUG 0 # 1:used; 0:noused >USE_ZMAX_PLUG 0 # 1:used; 0:noused #============================== Home Settings ============================== >X_HOME_DIR -1 # Direction of endstops when homing; 1=MAX, -1=MIN :[-1,1] >Y_HOME_DIR -1 # Direction of endstops when homing; 1=MAX, -1=MIN :[-1,1] >Z_HOME_DIR -1 # Direction of endstops when homing; 1=MAX, -1=MIN :[-1,1] >HOMING_FEEDRATE_XY 2400 # Homing X Y speeds (mm/m) >HOMING_FEEDRATE_Z 600 # Homing Z speeds (mm/m) >HOME_Y_BEFORE_X 0 # When G28 is called,0: X home before Y; 1: Y home before X #============================= Z Probe Options ============================= #BLTOUCH 1 # 0:disable BLTOUCH; 1:enable BLTOUCH #Select for a probe connected to Z-Min or Z-Max. >Z_MIN_PROBE_PIN_MODE 1 # 0 : NULL; 1: ZMIN; 2: ZMAX >Z_PROBE_OFFSET_FROM_EXTRUDER 0 # Z offset: -below +above [the nozzle] >X_PROBE_OFFSET_FROM_EXTRUDER -45 # X offset: -left +right [of the nozzle] >Y_PROBE_OFFSET_FROM_EXTRUDER -5 # Y offset: -front +behind [the nozzle] >XY_PROBE_SPEED 4000 # X and Y axis travel speed (mm/m) between probes >Z_PROBE_SPEED_FAST 600 # Speed for the first approach when double-probing (with PROBE_DOUBLE_TOUCH) >Z_PROBE_SPEED_SLOW 300 # Speed for the "accurate" probe of each point >Z_SAFE_HOMING 1 # 0:Disable£¬1£ºEnable #=============================== Bed Leveling ============================== >BED_LEVELING_METHOD 3 # 0:NULL_BED_LEVELING; 3:AUTO_BED_LEVELING_BILINEAR; 5:MESH_BED_LEVELING >GRID_MAX_POINTS_X 5 # the number of grid points per dimension. <= 15 >GRID_MAX_POINTS_Y 5 # the number of grid points per dimension. <= 15 >Z_CLEARANCE_DEPLOY_PROBE 10 # Z Clearance for Deploy/Stow > 0 >Z_CLEARANCE_BETWEEN_PROBES 5 # Z Clearance between probe points > 0 # Set the boundaries for probing (where the probe can reach). >LEFT_PROBE_BED_POSITION 20 >RIGHT_PROBE_BED_POSITION 185 >FRONT_PROBE_BED_POSITION 15 >BACK_PROBE_BED_POSITION 210 >MESH_INSET 20 # Mesh inset margin on print area for MESH_BED_LEVELING #============================= Z_PROBE settings ============================= >BLTOUCH 1 # 0:Disable BLTOUCH; 1:Enable BLTOUCH #============================== Delta Settings ============================= >DELTA_SEGMENTS_PER_SECOND 40 #--default >DELTA_DIAGONAL_ROD 346.75 #Center-to-center distance of the holes in the diagonal push rods. >DELTA_SMOOTH_ROD_OFFSET 211.5 #Horizontal offset from middle of printer to smooth rod center. >DELTA_EFFECTOR_OFFSET 28 #Horizontal offset of the universal joints on the end effector. >DELTA_CARRIAGE_OFFSET 14.5 #Horizontal offset of the universal joints on the carriages. >DELTA_RADIUS 169 #Horizontal distance bridged by diagonal push rods when effector is centered. >DELTA_HEIGHT 302 #height from z=0.00 to home position >DELTA_PRINTABLE_RADIUS 125 #Print surface diameter/2 minus unreachable space (avoid collisions with vertical towers). >DELTA_CALIBRATION_RADIUS 100 #set the radius for the calibration probe points - max 0.8 * DELTA_PRINTABLE_RADIUS #============================== Wifi Settings ============================= >CFG_WIFI_MODE 0 #wifi mode(0:sta;1:ap) >CFG_WIFI_AP_NAME SSID #wifi name >CFG_WIFI_KEY_CODE PASSWORD #wifi password >CFG_CLOUD_ENABLE 0 #cloud service enable(0:disable; 1:enable) >CFG_WIFI_CLOUD_HOST www.baizhongyun.cn #cloud server url >CFG_CLOUD_PORT 10086 #cloud server port >WIFI_LIST_SCAN 1 #Whether to use wifi list scan (1: use, 0: forbidden) #Do not display wifi button 0: Display WiFi button 1: Do not display >DISABLE_WIFI 0 #About information >about_type:Wanahao Robin_nano35 >about_version:V2.0.3.5_BL_D12/230 >about_company: >about_email: #Suspend/resume extrusion configuration (unit: mm) >PAUSE_UNLOAD_LEN -3 >RESUME_LOAD_LEN 3 #Suspend/resume extrusion increase percentage, when 0, the item does not work (unit: %) >RESUME_SPEED 80 #Wake mode configuration >cfg_Standby_mode 0 #Whether to enable the wake-up function (0: off, 1: on) >cfg_Standby_gap_time 600 #Set to enter sleep time (unit: second) >MACHINE_PARAMETER 1 #Online parameter(0: disable, 1: enable) #end.
-
Ca me l'a fait aussi, il faut fermer Cura s'il est ouvert le module KMS Wifi interfère avec SuperSlicer (idem Prusa). Pas de nouvelle de l'auteur pour l'ajout des vignettes.