Classement




Contenu populaire
Contenu avec la plus haute réputation dans 10/05/2024 Dans tous les contenus
-
26 pages sur la durée citée par @pascal_lb (90 jours). Je ne suis (du verbe suivre) aucun sujet ayant encore une bonne mémoire , par contre j'ai un onglet toujours ouvert sur Quoi de neuf? (à «manuellement» rafraichir de temps en temps) La majorité des notifications proviennent de citations, de mentions de mes sujets et/ou de réactions. Normalement on peut paramétrer, plus ou moins finement les notifications souhaitées. En tant que modérateur, on en reçoit aussi de temps en temps, particulièrement quand des petits rigolos s'amusent à nous interpeler ( @Modérateurs Globaux ou @Administrateurs (pour appeler en plus @Motard Geek et @Julien)2 points
-
Oui je vois, perso j'en ai 24 pages2 points
-
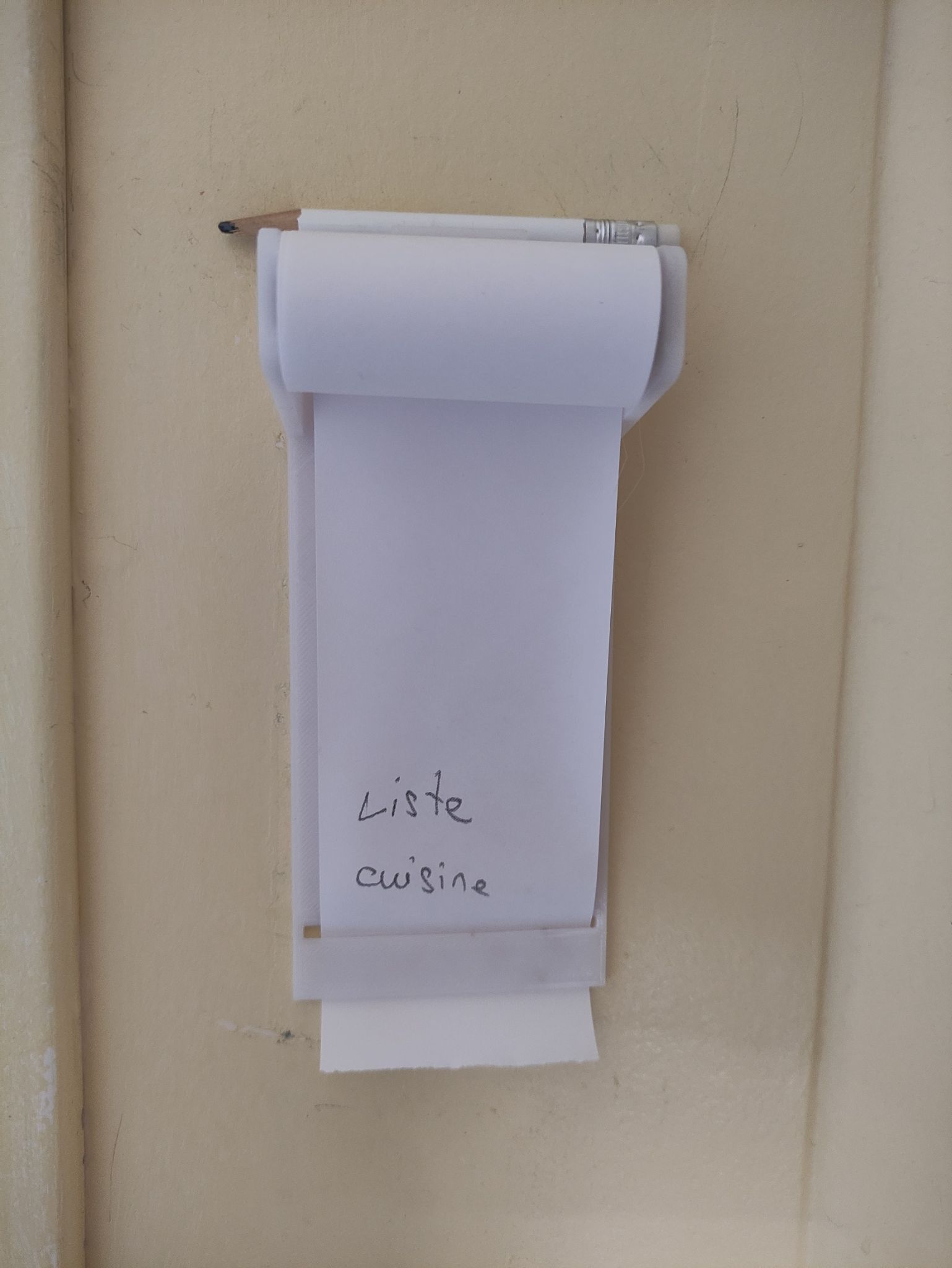
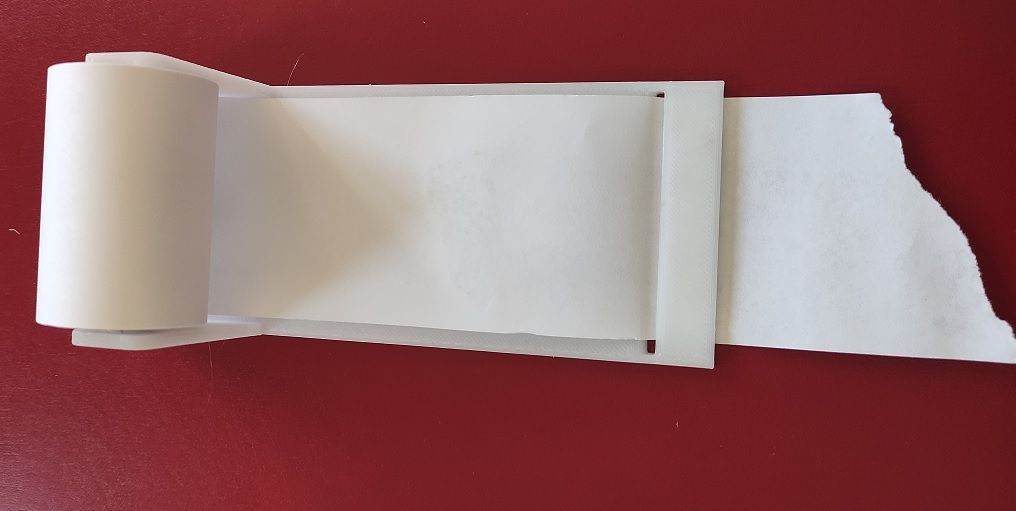
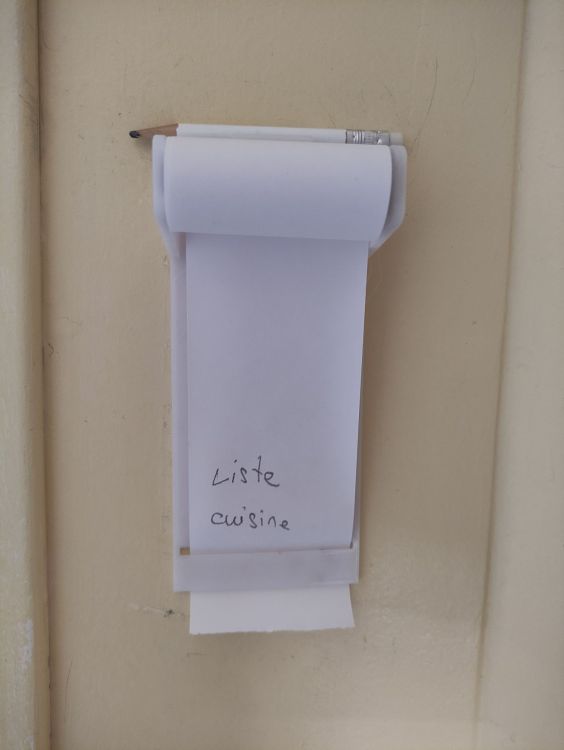
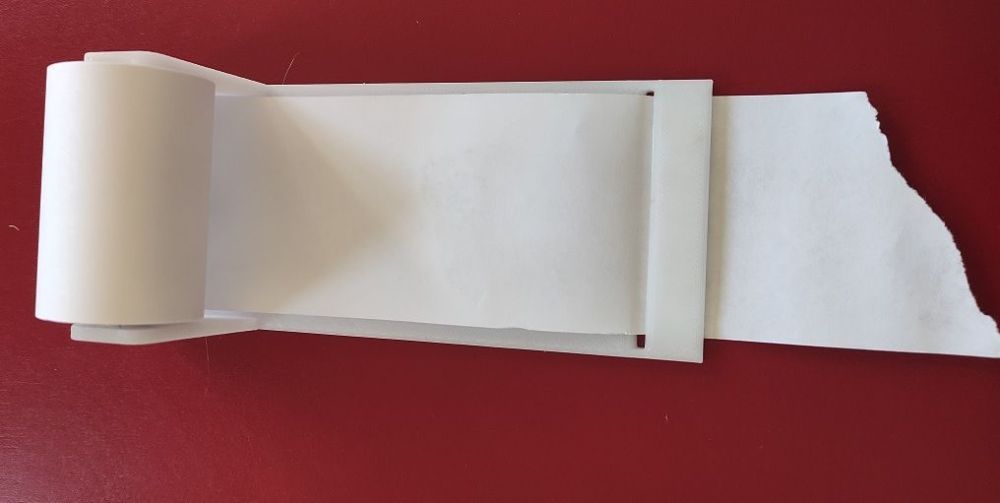
bien vu, je pensez que cela aller être hyper facile à trouver si cela intéresse voici le stl bloc_note.stl
 2 points
2 points -
Avec toutes ces machines, le coin au frais doit commencer à chauffer non ?2 points
-
( et d'une notification de plus pour toi . Edit >+ liker ton précédant commentaire donc une seconde notification ) J'ai un poil plus de pages de notifications... un total de 34. Je me demande entre @Motard Geek et @fran6p qui en a le plus. et combien de pages ? ( et une notification de plus pour chacun d'eux ) Re Edit > Mais aussi qui lance le plus de notifications ... ( je dois être dans le top 50 avec toutes les réactions que je fait )1 point
-
Ho ho du calme... je rigole1 point
-
Là pour moi il faudrait vérifier quelle distance de purge tu a lors des changement de filaments quand tu change du blanc au noir et inversement ( sinon tu auras probablement des mélanges donc un genre de gris aux points de reprise après changement de filaments )1 point
-
J'ai imprimé une lightbox personnalisée à partir de ce modèle en utilisant les paramètres d'impression du 3MF sans tour. C'est propre et ça ressemble un peu à ton print.1 point
-
Et voici quelques casques... On me fait remarquer sur un autre forum, qu'avec la visière, c'est le Stig Et leur propriétaires... Je dois faire un peu de peinture avant la suite...1 point
-
Pour reconstruire plusieurs Super Wheelie, il faut des pilotes, parce que sans ce serait pas fini... Le scan dont je dispose est loin d'être parfait, et c'est peut être ce qui va me décider à investir dans un scanner, pour voir si je peux faire mieux... En attendant, j'ai fait les comptes. - 1 pilote décapé - 1 pilote non assemblé et complet - 2 pilotes assemblés peints mais à la tête manquante... - 1 pilote non assemblé dont il manque la partie arrière de la tête A peu de chose près, on est en bonne voie... Mais sur le nombre de carrosserie en cours de remontage ou en attente de réfection, le compte n'y est pas, d'autant que j'ai des carrosseries imprimées en plus... Je m'étais dis que je pouvais bien en imprimer un ou deux temporairement... Mais c'est loin d'être gagné : la bouteille de résine est expirée, et à l'heure de la déverser dans le VAT, c'est des blobs qui tombent dans le VAT. Il va donc falloir attendre pour cette solution une nouvelle bouteille de résine... J'ai donc modélisé la partie arrière manquante sur le pilote non assemblé... Cette partie n'est pas bien compliquée, et du coup, assez facile à obtenir en CAD... Et après un petit ajustement, le tour est joué et je vais pouvoir utiliser le pilote non assemblé incomplet... Quelques heures plus tard... Le front de mon casque ressemble à quelque chose... Je pensais utiliser le scan pour recupérer la face du pilote, mais cela ne va fonctionner, car la définition est vraiment mauvaise... Donc il reste pas mal de boulot pour finir une face réaliste à mon pilote... Au final j'ai opté pour l'option totale triche, et j'ai fait une visière pour cacher le casque vide1 point
-
Oui, c'est même plutôt froid Les moteurs sont pilotés via les pilotes TMC2209 (ou TMC2240 pour la Q1 Pro) en mode UART, c'est donc dans le fichier printer.cfg, section [tmc2209 stepper_{x|y|z}] que ce réglage éventuel se fait (run_current). Mais on ne peut y mettre n'importe quelle valeur car ça dépend des caractéristiques des dits moteurs… En plus les axes X et Y utilisent le mode «sensorless» (pas d'interrupteurs de fin de course), il faudra donc probablement effectuer un réglage de sensibilité pour détecter correctement le 0 des axes X et Y (driver_SGTHRS). Je te laisse faire les recherches dans la documentation de Klipper. Si vraiment tu t'inquiètes de tes moteurs «chauds», oui, c'est la solution la plus facile à mettre en œuvre.1 point