
Classement




Contenu populaire
Contenu avec la plus haute réputation dans 22/04/2018 Dans tous les contenus
-
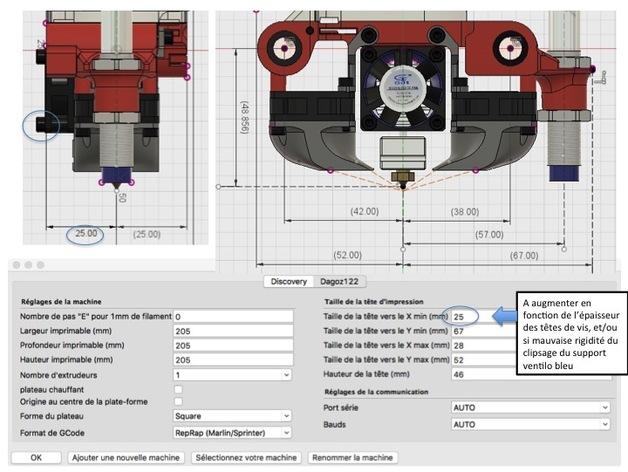
@Madmax63130 Le Marlin règle les courses et les positions de palpages. Le Slicer (Cura, Simplify3D, etc...) centre la pièce à imprimer... il faut donc AUSSI modifier les paramètre de ta machine dans ton slicer comme indiqué dans l'image ci-dessous issue de Thingiverse.
 2 points
2 points -
Oula oui, c'est vrai que le temps passe vite2 points
-
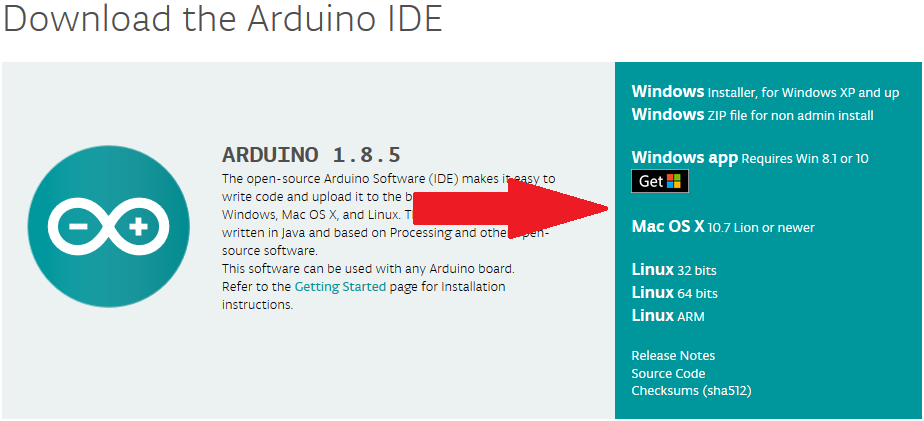
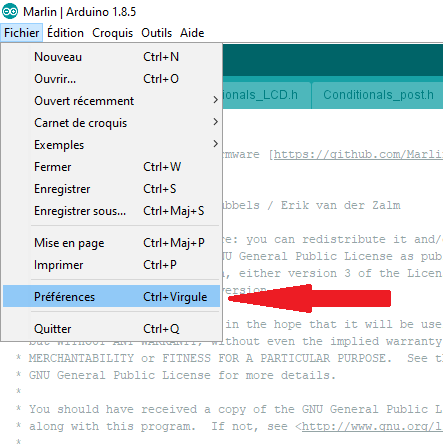
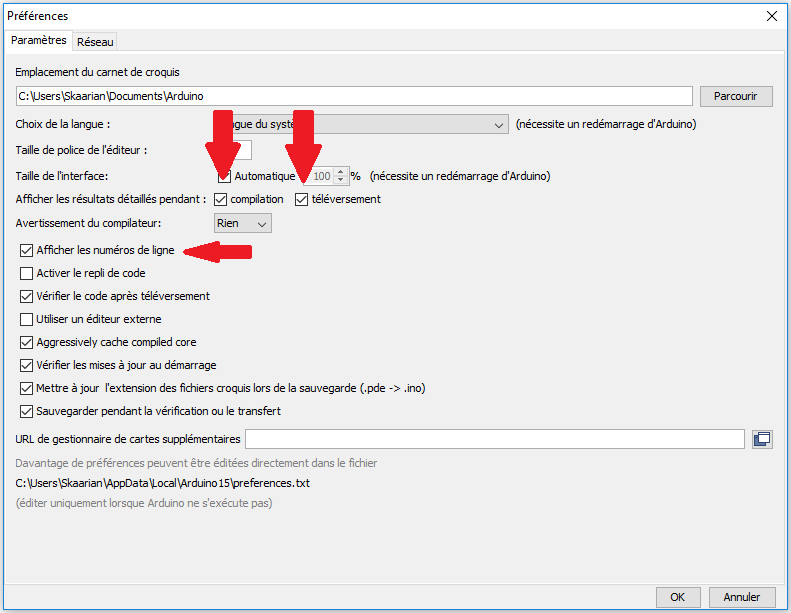
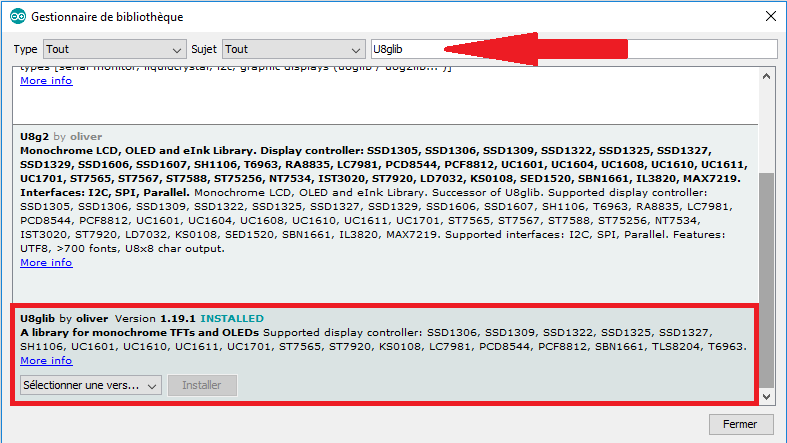
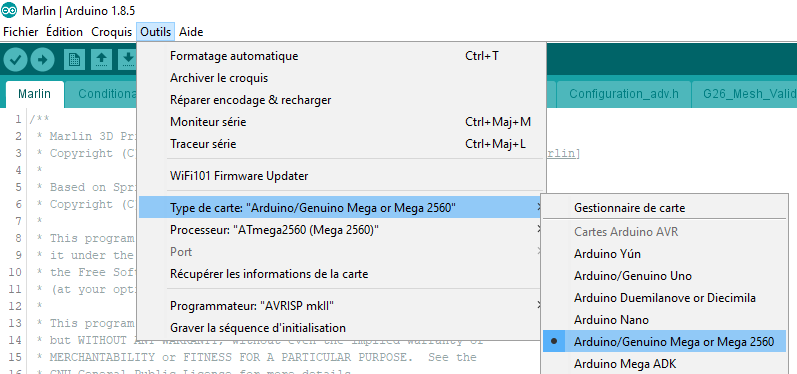
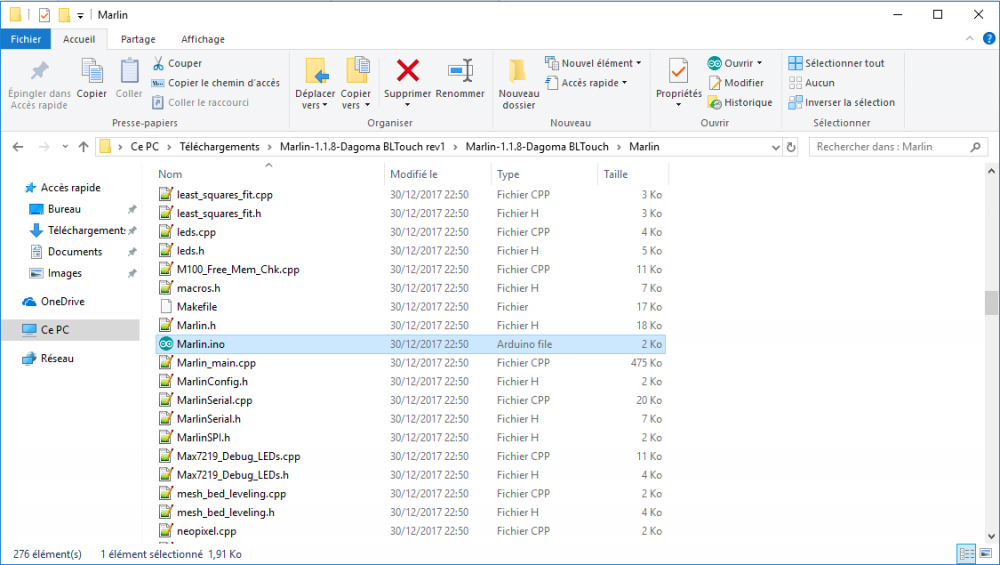
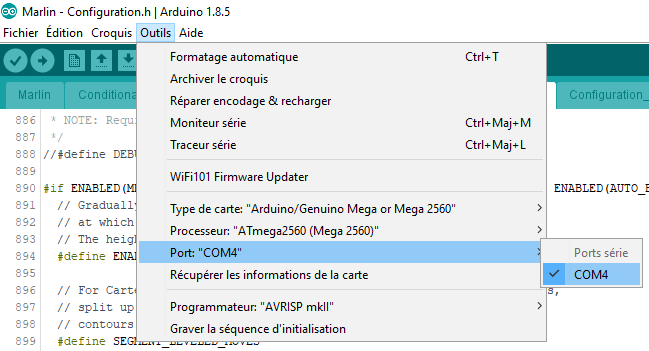
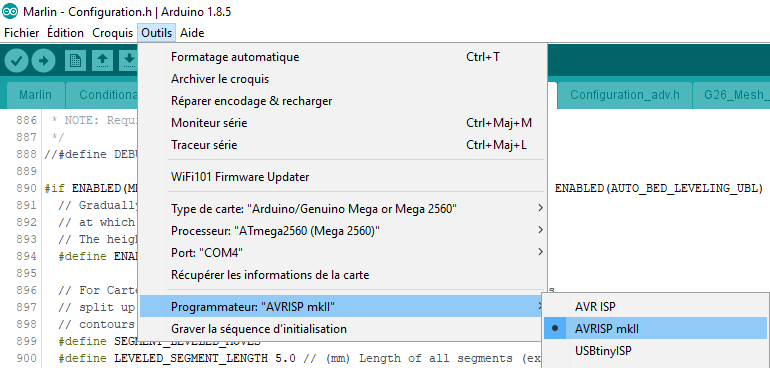
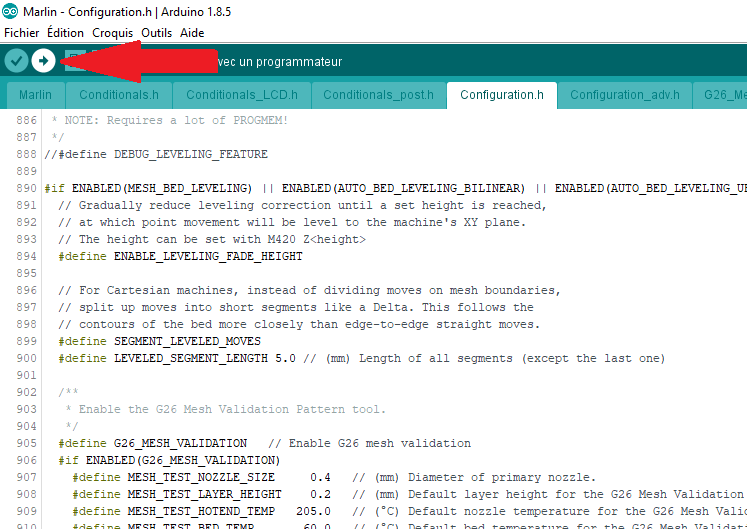
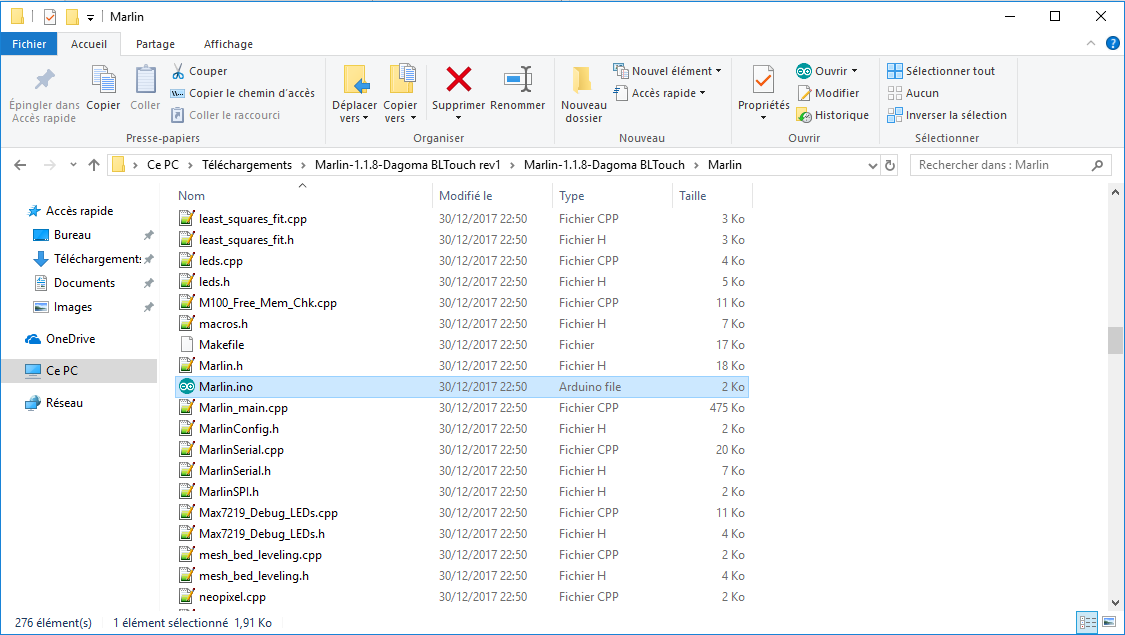
Bonjour, Suite aux nombreux postes des utilisateurs ayants des difficultés à compiler/téléverser un nouveau marlin via le logiciel Arduino sur leur DiscoEasy j'ai préparer ce petit tutoriel. Si vous êtes prêt, on y va... Il y en a pour cinq minutes maximum ! Après vous pourrez modifier comme vous le souhaitez votre DiscoEasy. Installation et configuration d’Arduino : Pour commencer, téléchargez la dernière version d’Arduino ICI . Le logiciel à télécharger ce trouve plus bas sur la page coté droit (voir image ci-dessous ) : Une fois le logiciel téléchargé, rien de compliqué. Installez le en cliquant sur suivant à chaque étape. Une fois l'installation terminée, nous allons passer à la configuration de ce dernier pour qu'il prenne en compte la carte MKS Base de la DiscoEasy. Lancez Arduino, puis allez dans "Fichier/Préférences" ou faites simultanément les touches CTRL + VIRGULE (Voir image ci-dessous) : Une fenêtre s'ouvre ! Afin d'y voir plus claire en cas d'erreur de compilation ou de téléversement, on va activer les résultats détaillés dans les paramètres ! Cochez les cases indiqués par une flèche rouge sur l'image ci-dessous. Une fois terminé cliquez sur "OK" en bas à droite. Maintenant, allez dans "Croquis/Inclure une bibliothèque/Gérer les bibliothèques comme indiqué sur l'image suivante : Une fenêtre s'ouvre. Ici nous allons inclure une bibliothèque manquante et mettre à jour celles déjà installées ci nécessaire ! Commençons par installer la librairie U8glib nécessaire pour marlin qui n'est pas présente dans Arduino après l'installation. Comme indiqué par une flèche rouge dans l'image qui suit, dans l'onglet de recherche écrivez : "U8glib". Cliquez dans la liste sur U8glib by olivier encadré en rouge sur l'image. Cliquez sur le bouton "Installer". Voilà, c'est fait Il est possible que certaine de vos bibliothèques ne soient pas à jour. Pour les mettre à jour, sélectionnez dans le menu déroulant (à gauche du champ de recherche que nous avons vu il y a un instant) "Type" : "Possible de mettre à jour". Si des bibliothèques apparaissent dans la liste, vous cliquez sur chaque une d'entre elle est sur le bouton mise à jour (comme pour installer une nouvelle bibliothèque). Plus qu'une étape et le logiciel est prêt ! A présent, on va indiquer à Arduino pour qu'elle type de carte le compilateur doit fonctionner. Pour ce faire, ouvrez le menu "Outils/Type de carte" cliquez sur "Arduino/Genuino Mega or Mega 2560" comme surligné sur l'image ci-dessous : Puis choisir le programmateur: "AVRISP mkII". Maintenant, ouvrez la version de marlin que vous avez modifié à téléverser en cliquant sur le fichier "marlin.ino": Arduino ouvre le marlin, allumez votre imprimante. Laissez la booter sur le marlin actuel. Une fois le boot terminé branchez le câble USB de votre PC à l'imprimante. Normalement, elle va rebooter une nouvelle fois. Une fois qu'elle a terminée, rendez vous sur le logiciel Arduino déjà ouvert et cliquez sur "Outils/Port:" Sélectionnez le port de communication (Port COM4) sur l'image si-dessous, mais celui-ci peut varier en fonction de votre configuration ! Voilà, tout est prêt ! Cliquez sur le bouton "Téléverser" indiqué par une flèche rouge sur l'image qui suit : Et paf ça fait des chocapics !.... Normalement, il va compiler puis téléverser le nouveau marlin ! Cette opération peut prendre un peu de temps. Pour voir si le téléversement ce fait après la compilation, je vous conseil de mettre le plateau en position arrière. Quand les leds bleus vont s'allumer c'est que le téléversement à commencé ! Une fois le téléversement terminé, l'imprimante va rebooter toute seule !! Elle est prête avec votre nouveau marlin ! PS : Si vous possédez un écran, il faut réinitialiser l'EEPROM. Avec votre molette allez dans le menu : "Contrôler" descendre tout en bas est appuyez sur "Initialiser EEPROM". Bon print !

 1 point
1 point -
Hello J'ai créé un firmware pour la mega v2 (pas d'ABL, dual Z et carte trigorilla 8bits) qui est un mélange du travail de Murdock avec son écran TFT32 MKS et du travail d'un certain Derhopp de thingiverse. Cette version permet de passer en 1.1.8 en gardant l'écran de base de l'imprimante. Les sources sont disponibles sur github ici : https://github.com/systemik/Marlin Pour l'installer, c'est comme d'habitude, avec arduino pour la compilation et ensuite on pousse le tout sur l'imprimante. Moi je fais le fichier .hex et je l'envoi avec Octoprint (via le plugin firmware). Les valeurs dans le fichier de conf pour le tuning ou les pas de l'extrudeur sont normalement bonnes pour commencer. Si besoin, un petit M502 et M500 pour mettre l'EEPROM a jour. Pour revenir en arrière, il suffit de remettre le fichier original de Anycubic (sur leur site web). Différence par rapport au firmware officiel anycubic: Pas de music Pas de reprise après coupure de courant Reste des tests a faire pour voir si tout est ok Nouveauté autre que marlin : DerHopp a fait un menu special dans la partie SD. Si vous aller dans le menu print, vous pouvez sélectionner “Special Menu” en haut et appuyer sur le bouton rond/fleche pour entrer dans le menu. Depuis la, vous avez deja quelques entrées de configuré (read eeprom, save eeprom, auto bed …). Ça compense le manque de customisation du lcd. Et c’est facile d’en rajouter au besoin comme allumage des leds par exemple. Au besoin, voila les deux manipulations à faire (même si vous utilisée un autre imprimante ou autre marlin c'est pareil) : PID Tuning: On part à froid et on fait un : M303 E0 S200 C8 On note les valeurs trouvé à la fin du genre : Recv: PID Autotune finished! Put the last Kp, Ki and Kd constants from below into Configuration.h Recv: #define DEFAULT_Kp 14.23 Recv: #define DEFAULT_Ki 1.03 Recv: #define DEFAULT_Kd 49.32 et on fait un : M301 P14.23 I1.03 D49.32 et on sauve avec un M500 Extrudeur Steps: On note la valeur actuelle des pas à la commande M503 et on regarde la valeur trouvé pour le M92 derrière le paramètre E (92.6 par defaut sur la i3) Pour régler son extrudeur, on fait une marque sur le filament depuis l'extrudeur sur 15 cm par exemple. On remet le compteur d'extrusion à zero avec un G92 E0 Ensuite on chauffe la hotend et on lance la commande suivante pour faire avancer de 10 cm le filament : G1 E10 F 92 Ensuite on mesure combien de centimètre il reste entre la marque et l'extrudeur et on calcul la nouvelle valeur de pas : Ex : 9.1 cm sont pris au lieu de 10 donc la valeur sera 92.6*100/91 = 102 (ancienne valeur * 100 / nombre de cm pris). On envoie la nouvelle valeur dans l'imprimante : M92 E102 On sauve les valeurs : M500 Merci pour le retour si y'en a qui veulent tester. J'ai déja pas mal printé avec et j'ai pas eu de soucis (autre que le ventilo de refroidissement un peu trop puissant). Au besoin je peux mettre le .hex dans le topic pour ceux qui veulent pas s'embéter à compiler. Sinon, du coté des autre développeurs, un d'eux fait des modification de l'ecran anycubic. Video de démo de ce qu'il n'a pas encore partager avec le grand public : https://www.youtube.com/watch?v=zVJC_jGTYwQ Systemic1 point
-
@Dadaboum impecable merci beaucoup maintenant c’est bien au centre,j’avais laisser le x a 205.1 point
-
En faite tu modifie dans le marlin la taille imprimable en x . Comme la taille de la tête de dagoma ne fais que 32 et celle de Z 50 de large , ils ont conçus leurs machines pour que la tête une foi rangé en x soit a fleur du plateau donc en zero absolut . Sur le coup avec la différence de 18 mm entre les deux tu as normalement 9 mm de décalage du centre . Donc tu passe la largeur du plateau de x en 187 . Essaye ça car je crois que le gcode part du point zero qui n'est que la moitié de x et y par rapport au capteur de position ( les fameux micro switch ) // @section machine // The size of the print bed #define X_BED_SIZE 187 #define Y_BED_SIZE 2051 point
-
Non, j'arrête l'ABS pour l'instant, tant que j'ai pas monté la prise avec les fils doublés + la pièce pour la tenir + les mosfets, je me contente de petites pièces en PLA1 point
-
Hello Pas sûr que ça soye une bonne idée.... Il vaut mieux les garder, quitte à les tendre plutôt fort. Pasque Bl-touch ou pas, on quand-même régulièrement besoin des corriger un peu le Z à la volée, suivant comment ça se passe ! Le fait que les coins soient un peu déformés, faudrait peut-être diminuer le "jerk" et l'accélération maxi dans Marlin....1 point
-
J'vai inversé le X et Y #define X_PROBE_OFFSET_FROM_EXTRUDER -18 // X offset: -left +right [of the nozzle] #define Y_PROBE_OFFSET_FROM_EXTRUDER -46 // Y offset: -front +behind [the nozzle] #define Z_PROBE_OFFSET_FROM_EXTRUDER 0 // Z offset: -below +above [the nozzle] et donc la aussi j'ai inversé les valeurs : // Travel limits (mm) after homing, corresponding to endstop positions. #define X_MIN_POS -37 #define Y_MIN_POS -4 #define Z_MIN_POS 0 #define X_MAX_POS X_BED_SIZE #define Y_MAX_POS Y_BED_SIZE #define Z_MAX_POS 240 Et pour le moment j'ai affiné a peut prêt sais pas encore au top mais j'ai plus de 2mm de décalage avant javai plus de 3/4cm1 point
-
La bloquer avec une cale le temps d'imprimer une nouvelle tête.1 point
-
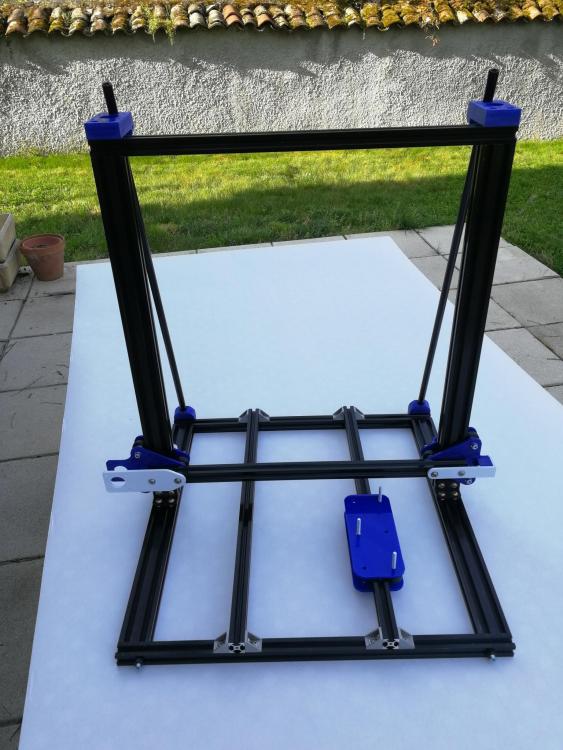
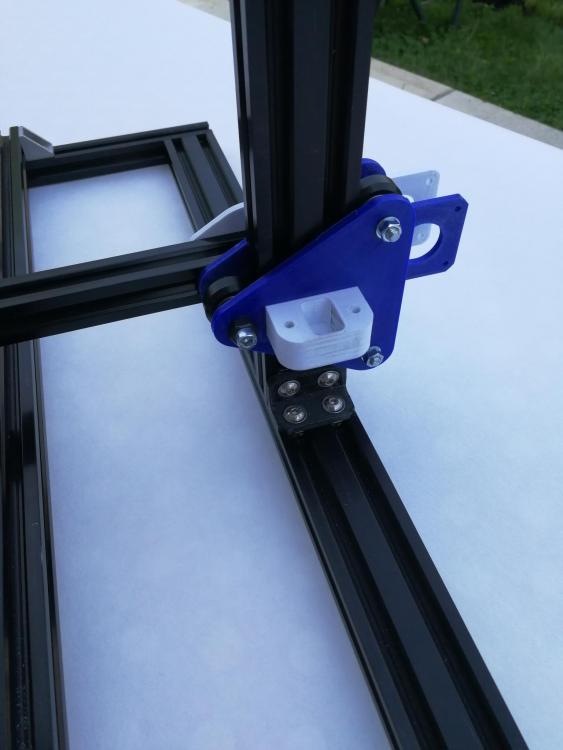
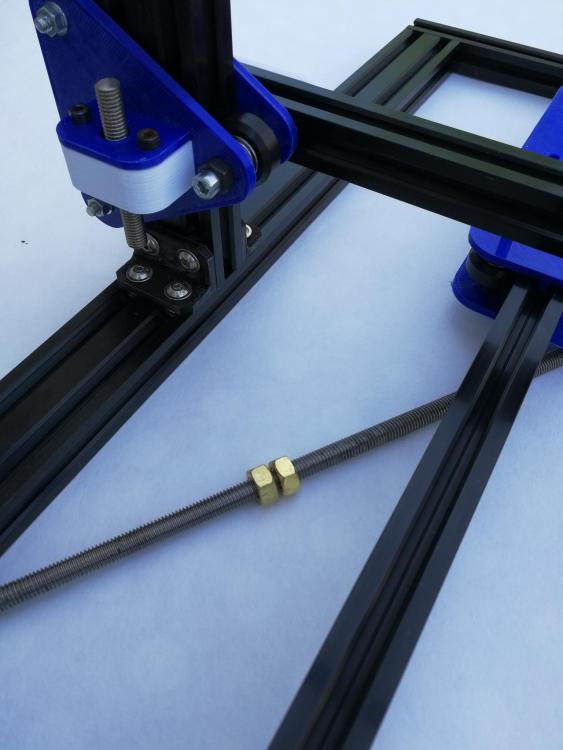
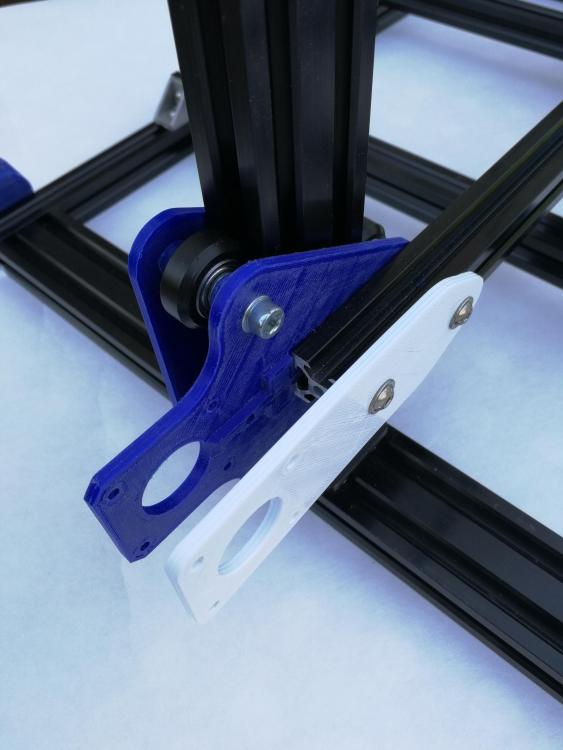
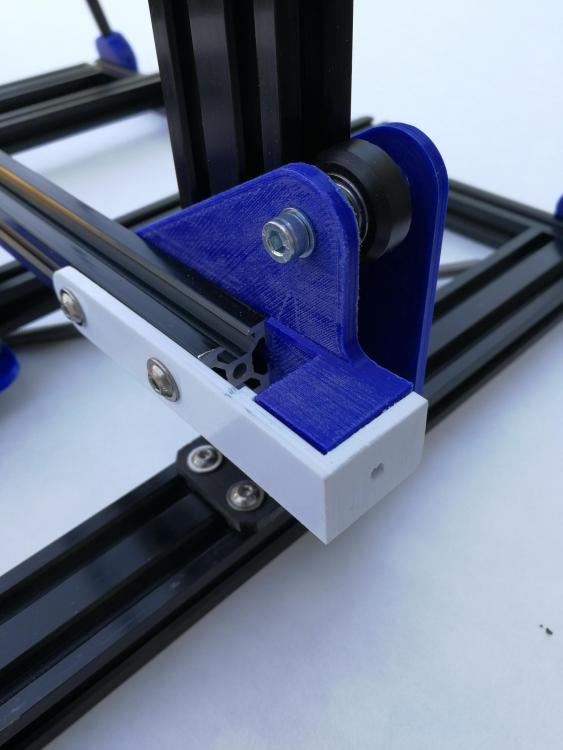
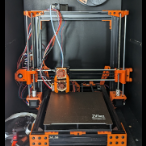
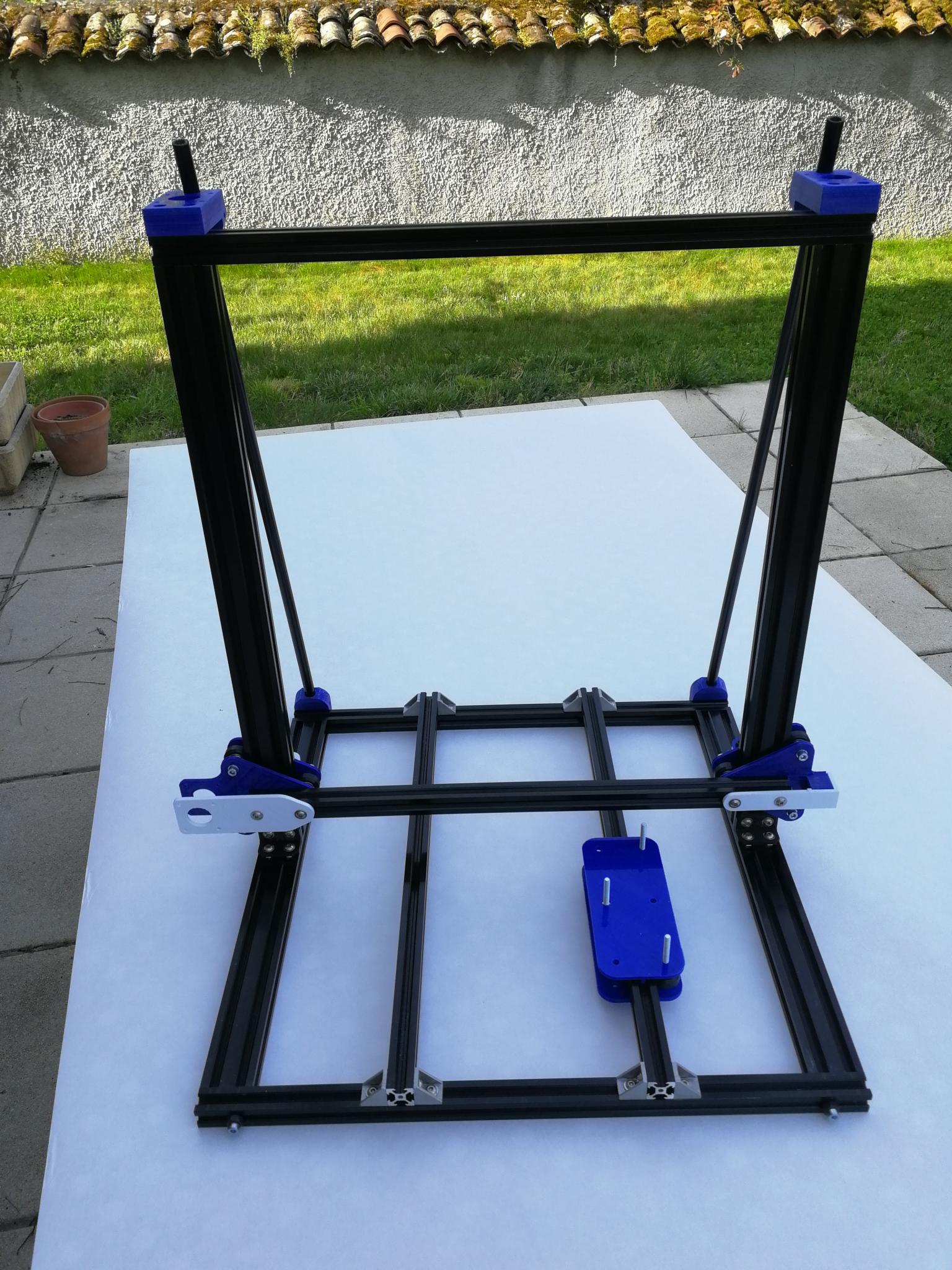
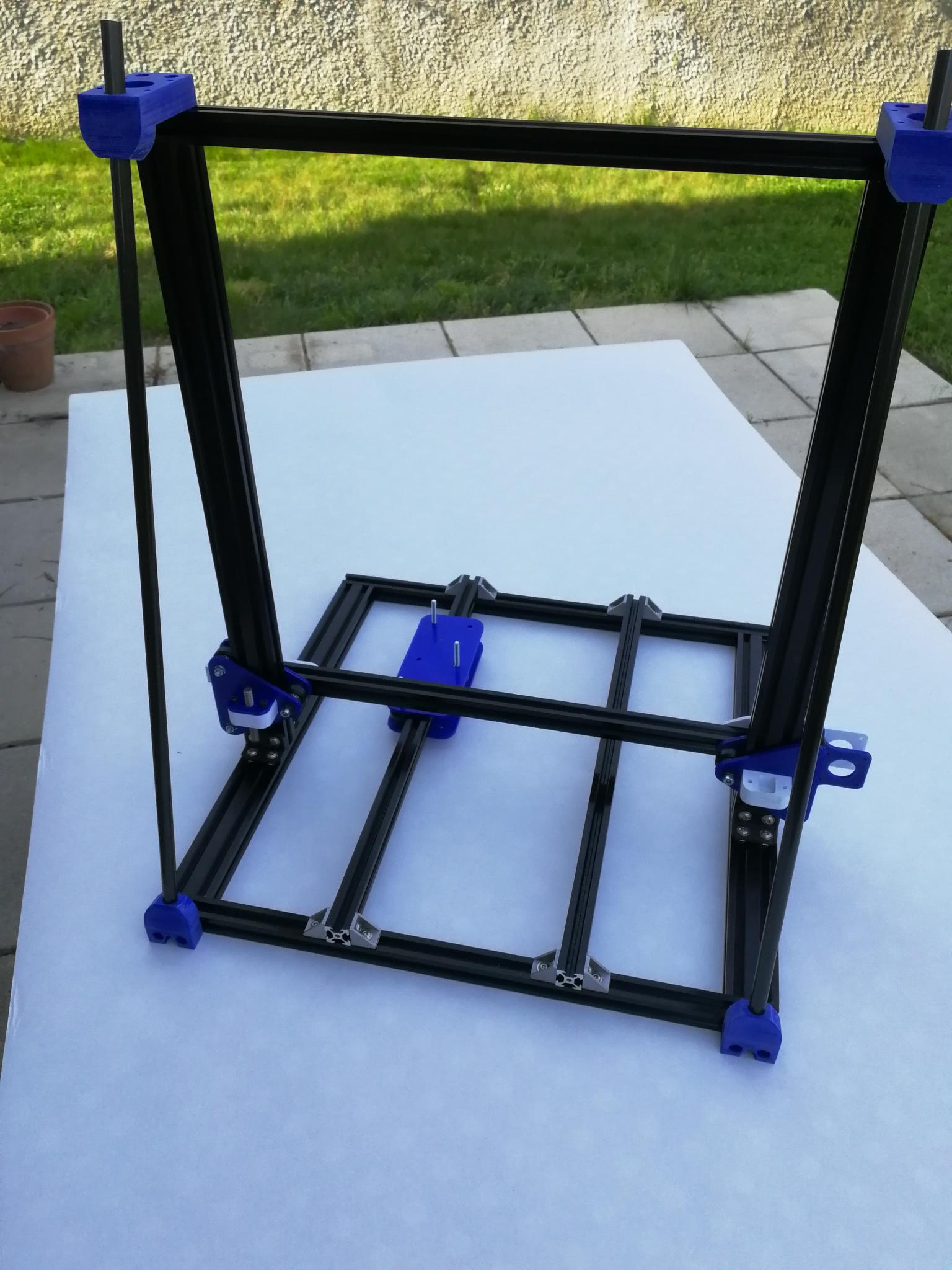
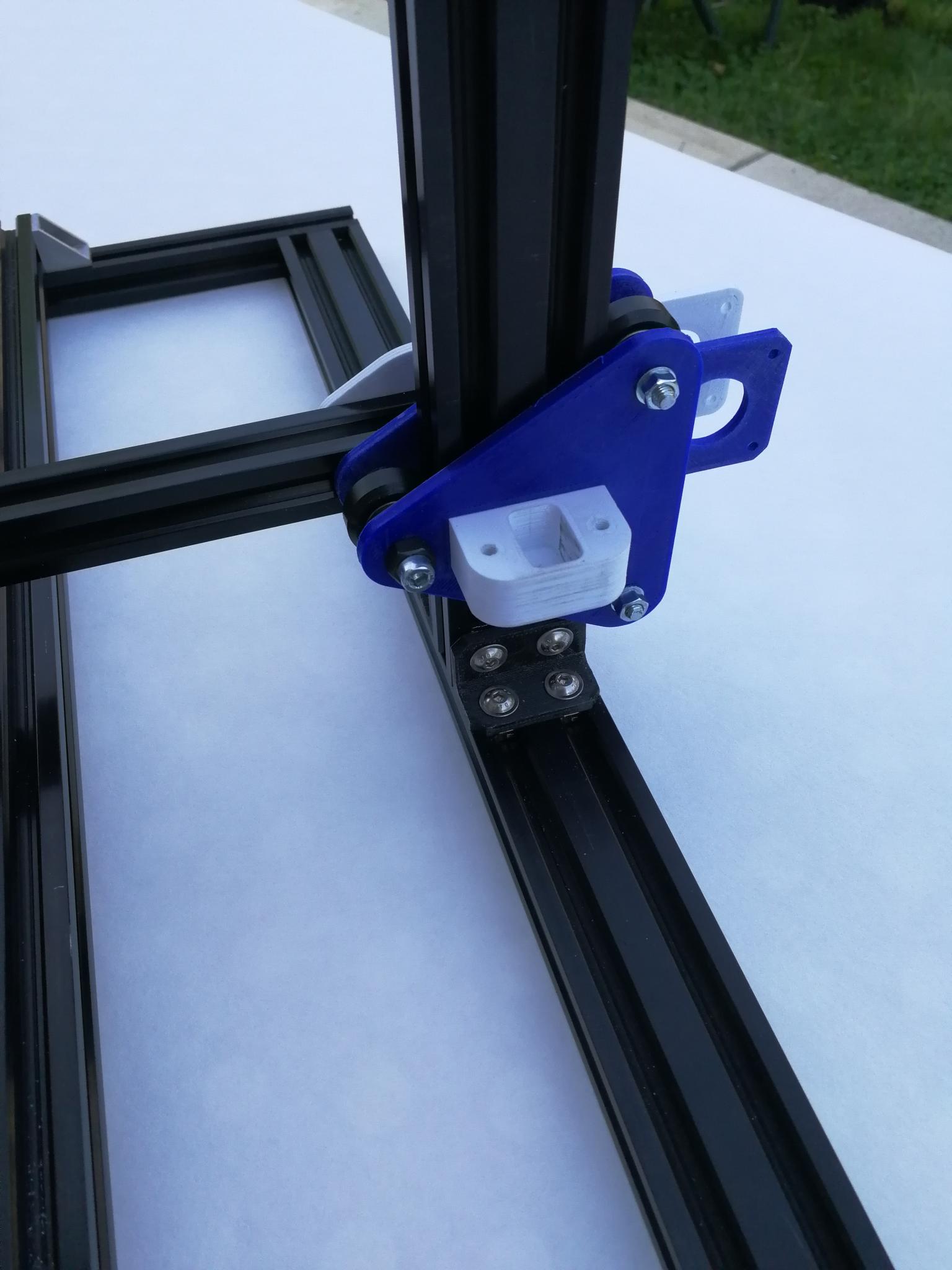
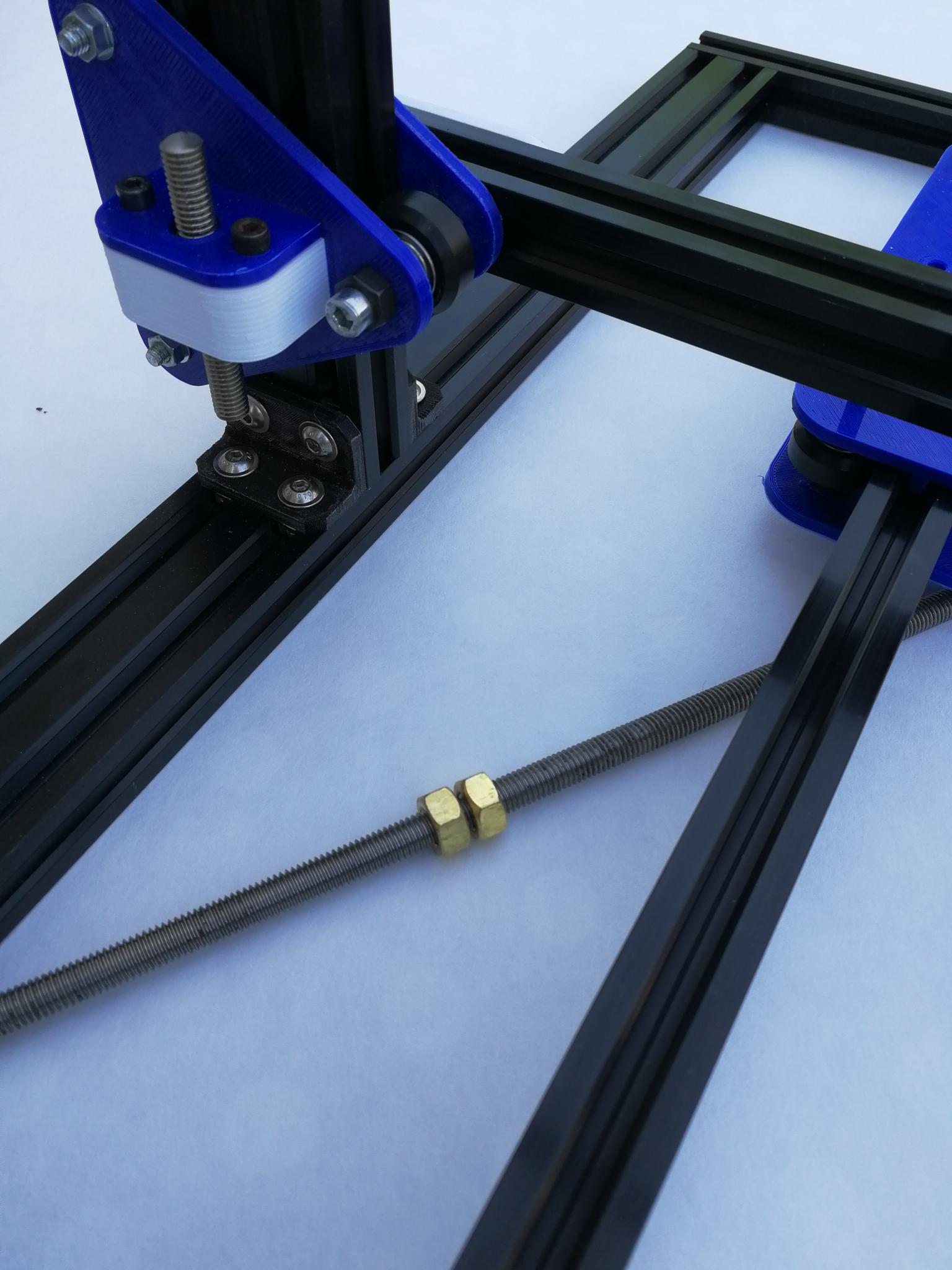
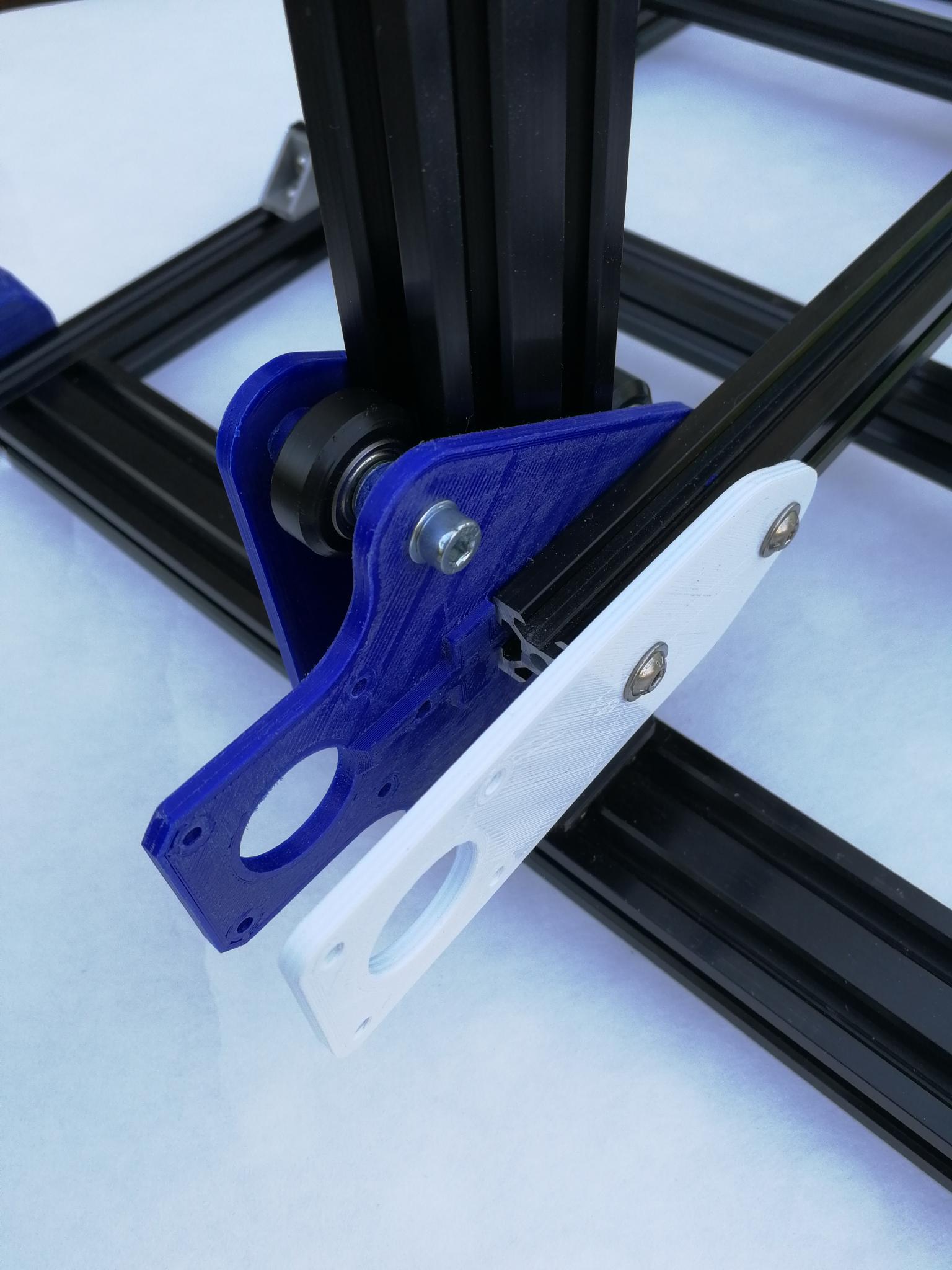
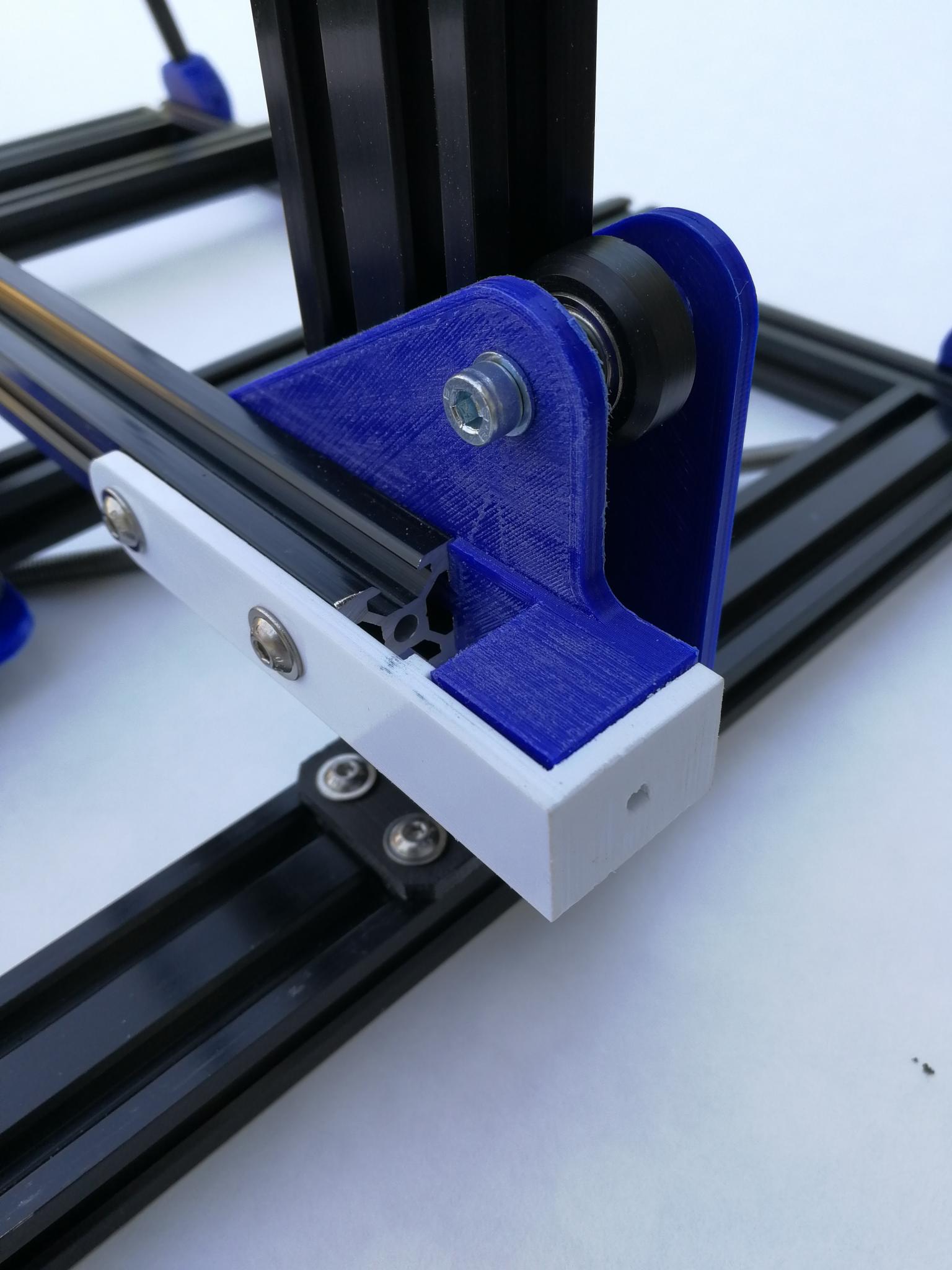
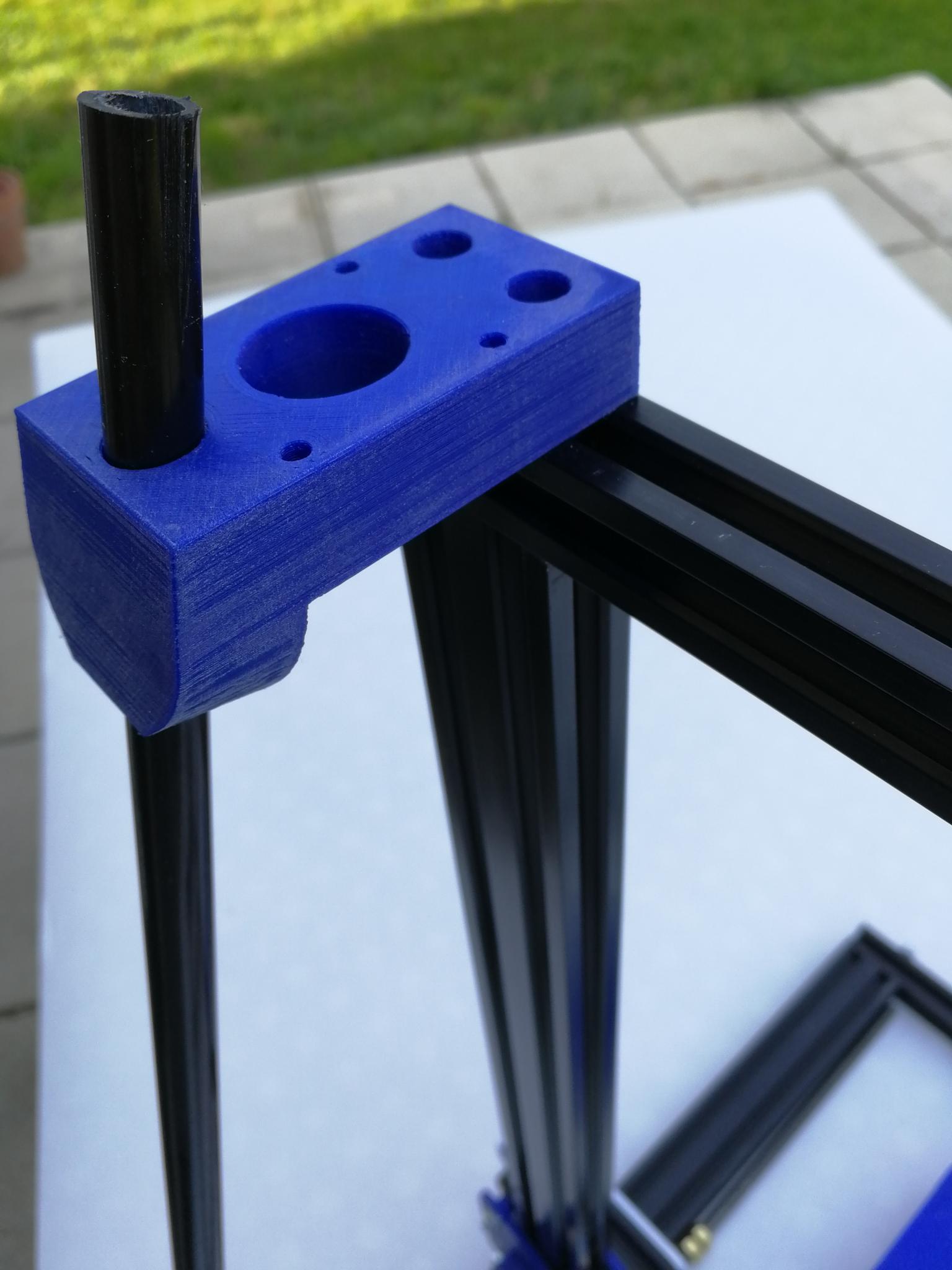
22 Avril Bonjour à tous, et plus particulièrement à ceux qui suivent mon projet Allez, je vous montre un peu où que j'en suis : L'impression des pièces et le montage avancent gentiment La mauvaise surprise de devoir recouper en deux les barres d'un mètre s'est transformée en opportunité : Comme on le devine sur la photo, j'ai coupé les barres de 40x20 à 460mm au lieu de 500. Du coup, je peux poser les rails du Y sur les transversales au lieu de les mettre entre, ce qui facilite leur fixation et la suite des opérations. Je perds 40mm en Y et je les gagne en Z Les "haubans" arrières en tube carbone-kevlar permettront le passage des câbles des moteurs et des extrudeurs. Là on devine les boîtes à écrous anti-backlash du Z. (comme "on" nous vend des noix en laiton pour des noix en bronze, pourquoi ne pas utiliser carrément des écrous hexagonaux en laiton ?) L'idée c'est de les monter écartés l'un de l'autre de telle façon que le couvercle de la "boîte" appuie légèrement sur celui du dessus tandis que celui du dessous est en pression sur le fond, annulant ainsi le jeu à l'inversion. L'ajustement du six-pans a très peu de jeu en X et pas mal en Y de façon à rendre l'alignement final facile. Nota : je sais pas si ça va marcher, pour l'instant ça n'est qu'une vue de mon esprit Support moteur X. Il y aura des entretoises tubulaires entre le flasque bleu et le blanc Tendeur de courroie X Support moteur Z et ancrage hauban au bon angle, vive Fusion 360 Suite au prochain numéro PS : je suis épaté par l'onctuosité du déplacement des galets sur les V-Slots !

 1 point
1 point -
Tu modifies les valeurs dans le fichier configuration.h du marlin que tu utilises dans le logiciel Arduino.1 point
-
Et oui @papa50 on dirait que tu as fait ça toute ta vie !1 point
-
je mettrai l'épaisseur de parois à un multiple de 0.4mm : 0.8 ou 1.2 ou 1.6 mais pas 1 ou 0.6 Philippe1 point
-
Disons que franchement on a quelqu’un de bien qui a poussé les réflexions très loin dans ses développements pour les Disco, se serait vraiment dommage de ne pas en profiter et qui plus est gratuitement. Cette mise en avant n’est que méritée et quoi de plus honorable que se soit une tierce personne qui jubile des créations pour en parler. Je prends le temps d’en le faire car rien pour le moment n’est égal aux développements Z122 et pourtant ma caisse de pièces tests est remplie au point que je la vide de temps en temps dans ma poubelle.1 point
-
Mais après tu vas pouvoir en profiter à fond.1 point
-
Bienvenue à toi sur le forum1 point
-
Hello Alors la difference pour la compilation vient surement du fait de l'activation de l'ABL et de ce que je suis en train de rajouter dedans : La possibilité de récupérer un print après une coupure de courant. Comme le firmware original mais avec le dernier code en date du marlin officiel dans la nouvelle banche . (basé sur la CR-10S) et mixé avec la détection de perte de courant avec le code de anycubic. J'ai réutilisé pas mal de commit de la branch debug du marlin officiel donc ça jour aussi sur la compilation car ils ajoutent des tonnes de features et checks dans les derniers temps. Il n'y aura aucun problème d'instabilité et beaucoup de gens utilise ce firmware maintenant sur le forum Anglais. J'ai eu aucun retour d'instabilité. Pour les TMC, J'ai des 2208 et j'ai mis un vref a 1.06 en suivant les excellentes explications de stef_ladefense sur d'autres posts (avec les vrais calculs basés sur les données constructeur). Voila les différences par rapport a la version original : Une FAQ est dispo sur le github :-) Je répond au questions :-) Thermal runaway active. ABL linear active (Touch mi setup). Hotend limitation at 260°. (can be too small for petg and ABS but good limit for V5 hotend). Hotend fan can run at 12V (do not put them at 100%. 85 is enough). Special menu from Derhopp active. -> New entry in the menu to put hotend in maintenance position. + New entry to preheat at 200/60 Et la nouveauté qui va donc être bonne à tester dans les prochains jours : La reprise après coupure de courant. En gros voila ce que j'ai fait : L'activation se fait avec un G6 an début de print (à la place du G5 qui est une fonction qui était canibalisée par anycubic). Au moins la, c'est des Gcode spéciaux. Ensuite, plusieurs cas: si on imprime depuis la SD ou depuis Octoprint en SD, alors on peut reprendre le print directement en utilisant la commande G8 (ou via le menu special aussi). Si on imprime avec une autre méthode comme par exemple octoprint ou depuis un slicer, alors on ne peux pas reprendre le print directement mais on peut avoir la dernière position et les autres infos (X,Y,Z,Temperatures,FANS,Gcode en queue ...) grâce à la commande G7. Exemple : Activation avec G6 : Recv : G6 POWER LOSS RECOVERY ACTIVATED Detection de coupure de courant et sauvegarde des infos sur la SD (et pas sur l'eeprom comme le faisait anycubic) Recv: POWER LOSS RECOVERY LAUNCHED Recv: Saving job_recovery_info Recv: valid_head:1 valid_foot:1 Recv: current_position: -5.00: 0.00: 5.00: 0.00 Recv: feedrate: 3.33 Recv: target_temperature: 22 Recv: fanSpeeds: 0 Recv: leveling: 0 fade: 0 Recv: target_temperature_bed: 22 Recv: cmd_queue_index_r: 1 Recv: commands_in_queue: 4 Recv: > M27 Recv: > G1 X150 F200 Recv: > G1 Y150 F200 Recv: > G1 X-150 F200 Recv: sd_filename: /TESTING.GCO Recv: sdpos: 367 Recv: print_job_elapsed: 14000 Recv: Writing to file: bin Reprise du print avec un G8: Recv: G8 POWER LOSS RECOVERY FROM SD Recv: Init job recovery info. Size: 568 Recv: echo:enqueueing "M420 S0" Recv: echo:enqueueing "M190 S22" Recv: echo:enqueueing "M109 S22" Recv: valid_head:1 valid_foot:1 Recv: current_position: -5.00: 0.00: 5.00: 0.00 Recv: feedrate: 3.33 Recv: target_temperature: 22 Recv: fanSpeeds: 0 Recv: leveling: 0 fade: 0 Recv: target_temperature_bed: 22 Recv: cmd_queue_index_r: 1 Recv: commands_in_queue: 0 Recv: > M420 S0 Z0 Recv: > G92.0 Z0 Recv: > G1 Z2 Recv: > G28 X Y Recv: > M420 S0 Z Recv: > G92.0 Z7.000 E0.000 Recv: > M117 Continuing... Recv: > G1 X150 F200 Recv: > G1 Y150 F200 Recv: > G1 X-150 F200 Recv: > M27 Recv: sd_filename: /TESTING.GCO Recv: sdpos: 367 Recv: print_job_elapsed: 14000 Recv: echo:Now fresh file: /TESTING.GCO Recv: File opened: TESTING.GCO Size: 944 Send: M27 Recv: File selected Recv: ok Recv: echo:enqueueing "G28 X Y" Recv: echo:Bed Leveling Off Recv: echo:Fade Height Off Recv: TFT Serial Debug: Bed is heating... J08 Recv: TFT Serial Debug: Bed heating is done... J09 Recv: TFT Serial Debug: Nozzle is heating... J06 Recv: TFT Serial Debug: Nozzle heating is done... J07 ...1 point
-
Bonjour, Très beau projet Donovan. Je commence à imaginer un peu la réalisation de ce robot de mon coté. Cependant, j'aimerais savoir, d'un point de vue mécanique, quels sont les problèmes rencontrés et alors les différentes améliorations à prévoir par rapport au bras original ? J'aimerais aussi munir le bras d'une meilleur motorisation. Avez vous des suggestions d'amélioration ou d'achat spécifique à ce sujet ? Suivant le développement de votre projet avec intérêt, Bonne continuation Cordialement JD981 point
-
salut, D'après la doc de la carte https://www.geeetech.com/Documents/Users Manual of GT2560.pdf, il faut le driver pour "USB serial converter CH340C" (page 16) Mais il semble que certain modèle soit équipé d'un " USB serial converter FT232RQ" Il te faudra alors ce driver http://www.ftdichip.com/Drivers/CDM/CDM21224_Setup.zip A+1 point
-
salut, les tmc2208 fonctionnent sans modif du firmware, ou si tu ne veux pas inverser physiquement les câbles des moteurs, tu peux le faire dans le firmware mais les modifs s’arrêtent là. effectivement il y a dans Configuration_adv.h une section tmc2208, mais seulement si tu connectes les tmc2208 à une pin libre pour les configurer via SERIE (softserial). mais ça ne fonctionne pas correctement car softserial ne gère pas correctement une multi connexion sur plusieurs pins, donc pas d’intérêt pour le moment. (par contre les tmc2130 qui se pilotent en SPI, fonctionnent correctement (mais toujours en débug sur marlin 1.x et 2.x). la seule chose qui fonctionne c'est de relier tout les tmc2208 sur la même pin et utiliser la config dans marlin pour programmer le courant sur les drivers de façon logiciel, mais vu le boxon de câblage, de prog, de déclaration, juste pour ne pas avoir à régler vref à la main ... ça vaut pas le coup ! donc tu remplaces simplement les pilotes existant par les tmc2208, tu règles correctement le vref et tu inverses les câbles moteurs (ou tu fait l'inversion soft dans marlin). pour info, Vref pour tmc2208 sur la méga c'est 1.06V.1 point
-
Salut Systemic, tu as fais quoi comme modif par rapport au code de derhopp ? (https://github.com/derhopp/Marlin-with-Anycubic-i3-Mega-TFT) car effectivement il y a une sacré différence entre les deux compilations le tient : Le croquis utilise 134136 octets (52%) de l'espace de stockage de programmes. Le maximum est de 253952 octets. Les variables globales utilisent 7210 octets (88%) de mémoire dynamique, ce qui laisse 982 octets pour les variables locales. Le maximum est de 8192 octets. La mémoire disponible faible, des problèmes de stabilité pourraient survenir. celui de derhopp : Le croquis utilise 122220 octets (48%) de l'espace de stockage de programmes. Le maximum est de 253952 octets. Les variables globales utilisent 5404 octets (65%) de mémoire dynamique, ce qui laisse 2788 octets pour les variables locales. Le maximum est de 8192 octets.1 point
-
Salut, le clignotement est un indicateur d’un défaut sur le bltouch souvent du à un faux contact (j’en avais un sur le connecteur côté carte) et avec un raz le bltouch cessait de clignoter jusqu’au lancement d’une nouvelle impression. Je vérifierai si j’etais toi la bonne continuité du courant et les connexions.1 point
-
mais on est deja demain Philippe1 point
-
Bonjour, Ma Dagoma n'etait pas assez viable pour faire des impressions de 10h. Choses que je pourrais faire avec ma SmartCub3D MK2+ !! @Klem1 Je suis bluffé par la qualité de ta peinture, c'est chouette. Comment a tu fait les deux couleur du logo StarWars?1 point
-
j'y travaille mais cela demande beaucoup de temps, je gère tout quasiment seul que ce soit le dévellopement de mon site, de mes machines, de carte électroniques, plus les réparation que je peut avoir à coté le temps. n'est pas forcement mon meilleur alliée1 point
-
Vivement les prochaines évolution de machine avec auto nivelage ^^1 point
-
J'ai trouvé la solution, alors je la partage avec vous : J'avais remplacé le tube PTFE par du PFA, un dérivé du PTFE, qui est transparent et supporte les mêmes températures et qui a un diamètre intérieur plus proche de celui du filament. Je n'avais pas pensé à la friction dans le tube. Je pense que c'était là le problème : Le filament quand il arrive au bout du tube PTFE se ramolli, et il frotte, d'où mon impression que ça bourrait dans la buse. J'ai remis le tube PTFE et tout va bien.1 point
-
Pour ceux qui veulent, j'ai faut des petites modifications et une faq sur le GitHub. Testé par pas mal de personnes du forum anglais avec succès. En anglais : Difference compared to anycubic official firmware: No start music No recovery after power failure Thermal runaway active ABL linear active (Touch mi setup) Hotend limitation at 250°. (can be too small for petg and ABS but good limit for V5 hotend) Hotend fan can run at 12V (maybe put 85-90% instead of 100% for the fan otherwise it cool to much) Special menu from Derhopp active. New entry in the menu to put hotend in maintenance position1 point





.thumb.jpeg.9a4019c4378b9b868774b9f3b684a811.jpeg)






