Classement


Contenu populaire
Contenu avec la plus haute réputation dans 26/06/2021 Dans tous les contenus
-
Je vais nuancer un petit peu, @Patave L'IDE Arduino et le framework Arduino ne sont pas explicitement requis pour (re)programmer une RAMPS ou toute autre carte basée sur un AVR. On aussi utiliser l'un sans l'autre ou aucun des deux. J'en connais qui font ça, tout à la main de A à Z, sans framework/IDE Arduino. Autrement, oui, tout à fait d'accord. Dans le cas de @Mares 59400, Arduino IDE est le meilleur choix.3 points
-
Il faut du temps au début ne t'en fait pas. il ne faut pas copier les lien mais bien récupérer les fichiers et les utiliser pour écraser les fichier actuel. De plus au début savoir qu'il faut cliquer sur "Raw" après être allez sur le fichier (n'est pas intuitif) pour au final le télécharger Les voici pris pour toi de https://github.com/MarlinFirmware/Configurations/tree/import-2.0.x/config/examples/Anet/A8 _Statusscreen.hConfiguration_adv.hConfiguration.h Il te faudra les copier là ou il faut pour remplacer les Configuration*.h actuel ...2 points
-
@Lidocain777 en phase.2 points
-
bon j'ai du payer le prix fort mais j'ai reussi a build le firmware j'ai reinstaller total windows (chiant mais j'ai de backup) et avec un windows frais et une reinstallation total de vscode ca a marcher il ma juste fait une fois une erreur sur l'installation de platformio mais apres ca j'ai reussi a recree le fameux .vscode et ca fonctionne la reste plus qua tout mettre sur la mks sgen ^^2 points
-
Bonjour, je savais que j’allais provoquer une discussion. Désolé @Mares 59400, je ne voulais pas detourner le forum. @PPAC @Lidocain777, moi aussi j’utilise vscode, et platformio (meme si je l’ai abandonné depuis un moment). Mais pour du dev soft. pour reprogrammer une ramps (mega2560 plutot) c’est vraiment pas indispensable surtout quand on n’a pas l’intention de developper du soft ( @Mares 59400 arrete moi si je me trompe). pour la lourdeur, vscode et platformio utilisent arduino ide pour la compile, donc de toute facon il faut les 2. et arduino est très simple a installer. Vscode et platformio sont beaucoup plus compliqués. Je pense qu’il faut aller au plus simple pour commencer et pas se disperser quand on se lance dans un chantier comme celui de @Mares 59400 maintenant chacun fait comme il veut évidemment2 points
-
Bonjour @methylene67 bravo pour la réalisation c'est très bien étudié et fonctionnel. L'idée est bonne et améliore la précision de la tension de la courroie. Tu peux te préparer pour le concours de l'épine section imprimante 3D bonne continuation. a+2 points
-
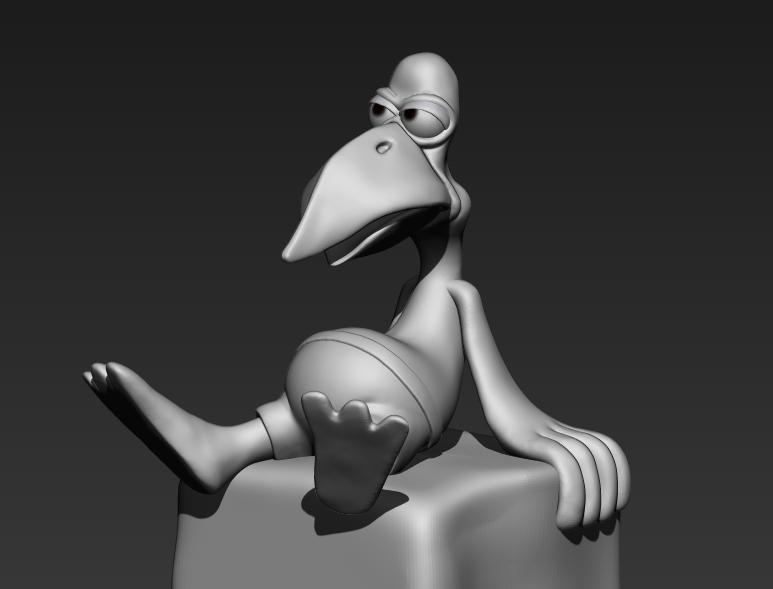
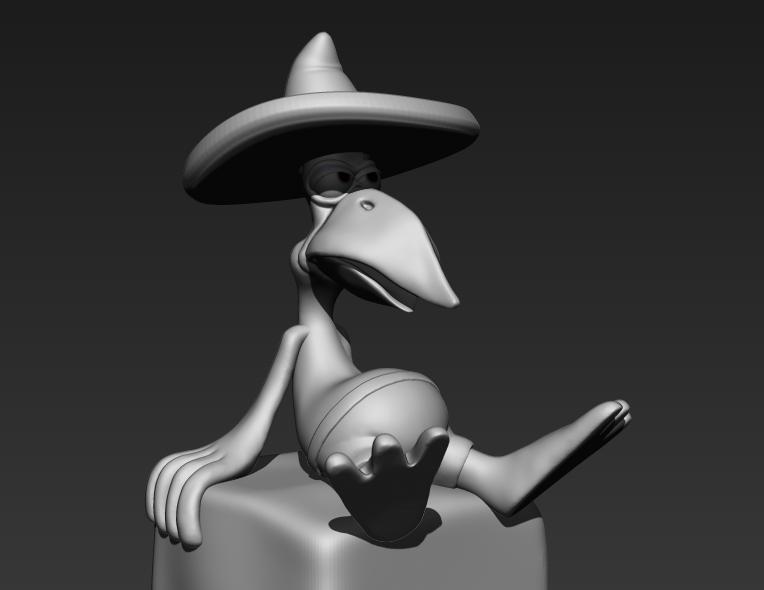
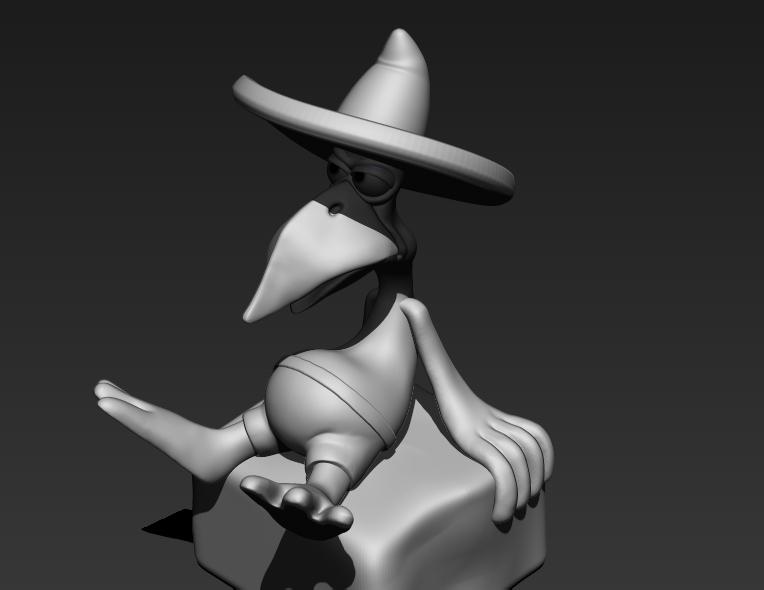
Bonjour à tous, Je vais vous présenter ici mes créations 3D et les impressions que j'en fais. Ce que j'avais commencé sur ce forum il y a plus d'un an, mais depuis j'étais un peu fâché avec l'impression 3D, enfin surtout avec mon imprimante, une Dagoma première génération qui n'a jamais vraiment bien fonctionné. J'ai maintenant une nouvelle imprimante depuis quelques mois et cela n'a vraiment rien à voir avec la précédente ! Une Anycubic l3 mega dont je suis tout a fais satisfait. Pour la création 3D j'utilise Zbrush et Blender Après ces précisions entrons dans le vif du sujet. Mon premier modèle est un drôle d'oiseau. Cette partie a été réalisée avec Zbrush...La suite et la préparation pour l'impression avec Blender. L'animal fait environ 18 cm de haut, l'impression des 5 parties a pris un peu plus de 30 heures, 21 heures pour le corps et le socle ! Seul le chapeau a nécessité un support et je n'ai pas rencontré de problème particulier pour imprimer. Je trouve le résultat plutôt satisfaisant. Et voilà ce que cela donne tout assemblé... C C'est bien entendu un montage provisoire, la finition n'est pas terminée, il y a un peu de ponçage, notamment le dessous du chapeau ou le support d'impressions à laissé des traces, puis il faut que je passe une solution de lissage (optimus) avant d'attaquer la peinture. L'impression a été faite avec du Néofil à 190 degrés (plateau chaufant à 60), couches de 0.1.




 1 point
1 point -
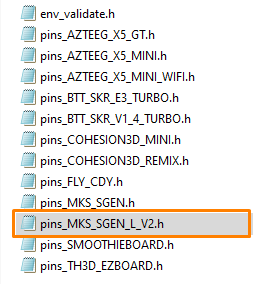
Le cable blanc en P1_23, le orang en P1_24 le marron sur le pin du milieu du Z+ et le rouge sur celle du haut du z+ tu as fait et sa passe pas ? Car moi je suis comme cela avec juste le gnd noir du blt connecté sur le GND 2 pin a côté du servo (P1_23). Le blanc est sur le servo P1_23 tu pas le choix, le pour le signal cable orange du BLT te faut aller modifié le fichier pins pour la SGenL faut aller dans "Marlin\src\pins\lpc1769" (lpc1769 le cpu de la SGenL V2, la V1 c'est lpc1768) et éditer ce fichier cherche ce paragraphe : #if Z_STALL_SENSITIVITY #define Z_STOP_PIN Z_DIAG_PIN #if Z_HOME_DIR < 0 #define Z_MAX_PIN P1_24 // Z+ #else #define Z_MIN_PIN P1_24 // Z+ #endif #else //#define Z_MIN_PIN P1_25 // Z- //#define Z_MAX_PIN P1_24 // Z+ #define Z_MIN_PIN P1_24 // define Z+ to Z- for BLTouch #define Z_MAX_PIN P1_25 // define Z- to Z+ for BLTouch #endif J'ai commenté les 2 lignes d'origines en rouge et ajouté les 2 lignes en bleus, l'idée ici est de dire a marlin que le connecteur Z- devient Z+ et le connecteur Z+ devient Z- . donc tu doit mettre le câble orange signal du BLt en P1_24 du Z+ et pour marlin il interprète le signal comme étant un signal envoyé en Z- ce qui est normale car le le blt indique la position basse du Z quand il palpe le bed. Je sais pas si cela est clair pour toi ? Si tu habitait dans le 77 je t'aurais bien proposé de regardé sur ta machine ce qui ce passe.
 1 point
1 point -
Salut, c'est du JST XH 2.54mm.1 point
-
Je viens de regarder la vidéo que tu m’as conseillée : c’est beaucoup plus clair et je m’aperçois que mon schéma n’est pas tout à fait correct puisque je n’ai pas fait la distinction entre EEPROM et firmware en dur. Il y a donc 3 niveaux à considérer : le firmware la ram l’eeprom Merci pour ce lien qui me permet de mieux comprendre et de répondre à ma toute dernière question concernant le changement d’offset à la volée : oui, il devrait être pris en compte. Correct ?1 point
-
Salut @Ke20bzh, De toute évidence, tu n'as pas pris les bons fichiers, sinon, dans le fichier configuration.h, tu aurais cette ligne: #define MOTHERBOARD BOARD_CREALITY_V4 et non: #define MOTHERBOARD BOARD_RAMPS_14_EFD Les fichiers sont dans ce dossier: Configurations-release-2.0.9\config\examples\Creality\Ender-3\CrealityV422 C'est à dire ceux-là: Configuration_adv.h _Bootscreen.h _Statusscreen.h Configuration.h1 point
-
Effectivement, si les impressions ne présentaient pas ce soucis avant, @PPAC a raison, tu devrais te pencher d'abord sur la mécanique si tu n'as rien changé dans le trancheur. Les solutions que je t'ai proposé peuvent corriger ce défaut, mais ce serait plus curatif que préventif. A privilégier donc les pistes "mécaniques". EDIT : @PPAC et tu n'as pas vu mon tuto pour le monter1 point
-
Retour sur ce sujet pour vous donner des nouvelles.... L'implantation du nouveau firmware s'est très bien déroulé, et surtout, depuis, j'ai pu faire quelques impressions, et tout est nickel.... Je vais maintenant explorer les possibilités qu'offre la version 2.0.9 ....1 point
-
@billedeclown01Dans le mille.... Je dois changer le sable dans mon filtre au moins une fois par année... Comme vous pouvez le voir, le tuyau du diffuseur est placé en plein centre. Lorsque le bac a sable est vide, ce diffuseur peut se déplacer. En placant mon Schmilblick : ca évite que le tuyau se déplace et reste bien au centre, et surtout, celà empêche le sable de se faufler dans le tuyau du diffuseur, ce qui le boucherait complètement.... Bravo @billedeclown01

 1 point
1 point -
Personnellement, je n'ai toujours pas vu les spécifications officielles détaillées. Je trouve qu'il est difficile de se prononcer sans elles et alors qu'aucun test de la machine n'est sorti. Mais bon, ce qui me semble probable c'est que la X2 ne sera pas un bouleversement par rapport à la X1. D'après les bruits qui circulent, j'appellerais plutôt ça une une X1 V5.1 point
-
Regarde sur Google, toutes les infos sont dessus (cherche un schéma de ta carte)1 point
-
et après : croquis / vérifier, compiler ctrl + R C'est bien cela ?1 point
-
Bon ce qui est bien c'est que maintenant tu as bien configuré l'environnement Il restera le plus sympa, mettre a jour la conf de ta machine avant de la downloder Pour le moment on ne download pas, on verifie l'environnement Donc le Port on verra plus tard, ce qui est bien c'est que tu vois le COM4 , ca veut dire que ta carte est connectée Bon je vais devoir te laisser mais commence a regarder les tutos1 point
-
celui la la j'ai ca c'est déjà mieux.
 1 point
1 point -
Pourquoi ? Il est indispensable pour que Platformio IDE fonctionne Quand je parlais de versions c'était une V2 (obsolète de puis plus d'un an) et la V3.1 point
-
J'essaye déjà de fabriquer un altimètre maison, dans le commerce c'est environ 40 euros minimum (pour des fusées), le problème c'est le manque de place ! J'ai environ 12 sur 3,5cm d'espace libre... Si tu savais à quelle point c'est facile et abordable de fabriquer des trucs qui font à peu près "PAAAFFF" tu serais surpris ! (d'ailleurs les moteurs de micro-fusée sont fabriqué à partir de sucre, je ne détaillerais pas la recette, j'ai pas envie de prendre un avertissement ) Je m'étais renseigné, et pour la réglementation des fusée amateur c'est un peu le foutoir ! (lois des années 70-80 et des années 2000) Ce que j'ai retenu: On a le droit de lancer des fusées comme on veut tant qu'elles ne dépassent pas 150 mètres d'altitudes (même plafond que pour les drones) donc il faut que je prenne un moteur moins puissant D9->C6 ou B4, et tant que c'est sur un terrain privé ou si on a une autorisation du propriétaire. Sinon il faut voir avec le CNES et lancer ses fusées lors d'un rassemblement, c'est eux-mêmes qui nous donnent les moteurs, et la mise à feu est faite par des artificiers.1 point
-
@Ke20bzh Bonjour, Les messages en jaune dans VSC sont des avertissements pas des erreurs (en rouge) donc ce que tu nous montres n'indique pas quelle erreur empêche la compilation. Ton dossier Marlin, il est situé dans ton «Onedrive» ? Le mieux est de mettre le dossier contenant le fichier platformio.ini et le dossier Marlin au plus près de la racine de ton disque. As-tu plusieurs versions de Python installées ?1 point
-
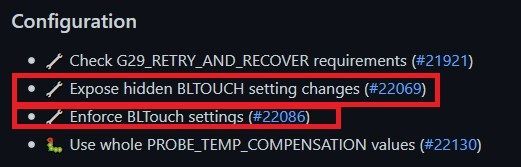
Depuis la version 2.0.9 des vérifications lors de la compilation du firmware ont été «renforcées» (voir ici et là), le Z_MIN_PROBE_ENDSTOP_INVERTING en fait partie Mon bloc de {XYZ}_MIN|MAX_ENDSTOP_INVERTING est désormais : La directive «CR10V2_BLTOUCH» est activée (ou pas ) au début du fichier configuration.h (ça permet en activant / désactivant uniquement cette directive d'avoir des fichiers configuration.h et configuration_adv.h fonctionnels pour une CR10-V2 basique ou avec Bltouch Les fichiers de mon dépôt github sont à jour, pas forcément la documentation de mon sujet (je fais un nœud à mon mouchoir pour le faire )
 1 point
1 point -
A priori comme tu veux, mais je serais plus efficace pour t'aider en 1.1.9 Mais @Lidocain777 proposait 2.0.1 point
-
Bon on va faire une pause pour aujourd’hui histoire de recharger les batteries ... tu aura peut etres des astuces de posté entre temps1 point
-
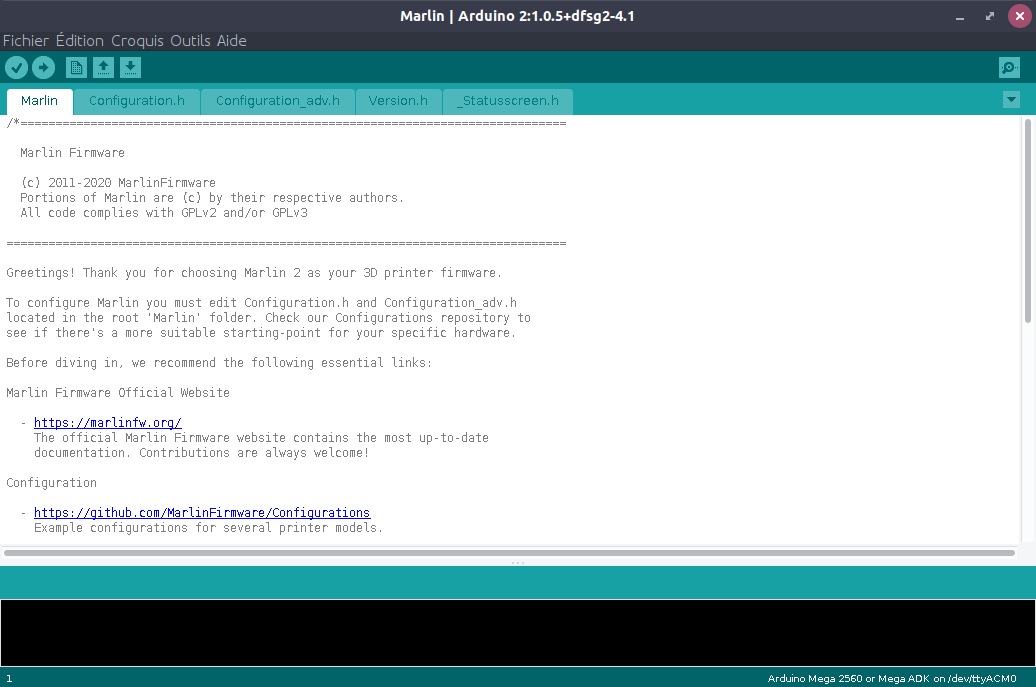
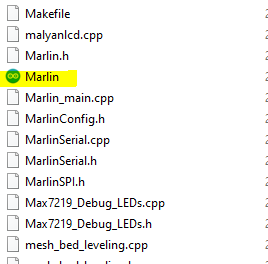
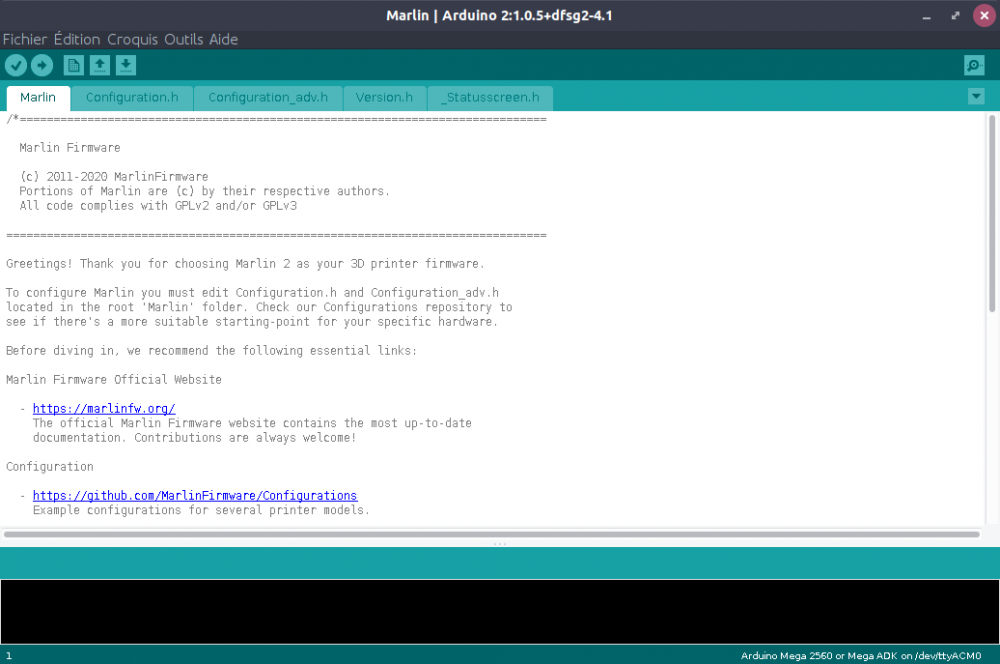
Tu va me faire lancer Arduino IDE non mais vraiment Si tu ouvre bien Arduino IDE depuis le fichier Marlin.ino (ou que depuis arduino IDE tu ouvre le Marlin.ino) chez moi, j'arrive a un truc du genre (cf les onglets) et j'ai les fichiers via la fléche dont je parlé ... mais j'ai pas forcement la même version de arduinoIDE car je suis sous linux ... Bon et je me demande si l'on prend la bonne stratégie d'utiliser les fichier d'exemple comme cela car il y a pas mal de truc a changer ...
 1 point
1 point -
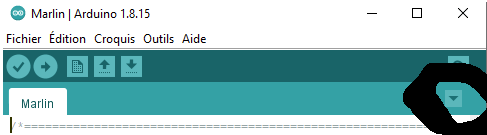
Prend bien ton temps, Il faut passer par Arduino IDE en haut a droite tu a une petite flèche pour ouvrir les fichiers du projet en cours Edit De plus, forcement ces fichiers vont devoir être adapté pour fonctionner sur une carte Arduino+RAMPS. Le Configuration.h #define MOTHERBOARD BOARD_ANET_10 a modifier en #define MOTHERBOARD BOARD_RAMPS_14_EFB activer (décommenté c-a-d enlever les "//" en debut de ligne pour cette ligne) #define REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER et commenter (ajouter "//" en debut de ligne pour ) //#define ZONESTAR_LCD Et là j'éspére que tu obtiendra une compilation sans erreure comme chez moi mega2560 SUCCESS 00:00:50.589
 1 point
1 point -
Salutation ! (mes excuses j'oublie les bonne manières ) Oui il te faut les 3 fichiers Configuration.h et Configuration_Adv.h le dernier (pour avoir un logo lors du démarrage) peut ne pas etre pris mais alors tu devras commenté sont utilisation dans le Configuration.h Mais ceux là seulement si tu utilise bien une version 2.0.9 des sources de marlin ... sinon il te faut un autre lien ... Seulement si ArduinoIDE ne la pas installé lors de sont installation ... mais si tu a un numéro de port COM alors cela devrait déjà être fait.1 point
-
https://github.com/MarlinFirmware/Configurations/tree/import-2.0.x/config/examples/Anet/A8 ! non ? Pour le port COM4 seulement si c'est bien celui qui apparaît dans le gestionnaire des périphériques quand tu branche la carte en USB au PC ... (tu aura peut être besoins d'installer un driver windows si tu a un "!" sur l'icone du périphérique et qu'il n'y a pas de numéro de port COM ...)1 point
-
Le microcontrôleur est bien un Mega/Mega 2560, oui. Tu peux tester une compilation, mais je déconseille de le faire à ce stade (sauf pour vérifier que ça compile bien, sans erreur). Une config pour l'A(M/V)8 est nécessaire pour que, à l'upload sur la carte, cela fonctionne. Marlin fournit une config pour l'A8. Si je ne dis pas de bêtise ( @Patave, corrige au besoin ), ça marchera sur l'AM8 et l'AV8, la carte d'origine étant la même. Tu auras besoin de ceci : https://github.com/MarlinFirmware/Configurations/tree/import-2.0.x Ça comporte un ensemble de config pour pas mal d'imprimantes. Dans le cas de l'A(M/V)8, tu n'auras qu'à copier/coller les 3 fichiers depuis "Config/Anet/A8" dans le répertoire de Marlin, au même niveau que Marlin.ino . Puis compiler, uploader, et vérifier si ton imprimante fonctionne comme attendu.1 point
-
Hello @methylene67 Effectivement c'est super bien pensé tout cela. En revanche, est-ce que l'on n'arrive pas un peu trop au bout de l'axe du moteur, à cause de l'épaisseur des pièces ? Cela ne pose pas de souci ? Il faudrait effectivement quelque chose pour l'axe Y aussi... D'ailleurs, as-tu mis un rail sur l'axe Y ? Je commençais à me poser la question pour la mienne, et aussi pour remplacer le capteur mécanique par un optique. Je ne sais pas trop si cela apporte quelque chose. Bonne journée !1 point
-
Mode duplication :1 point
-
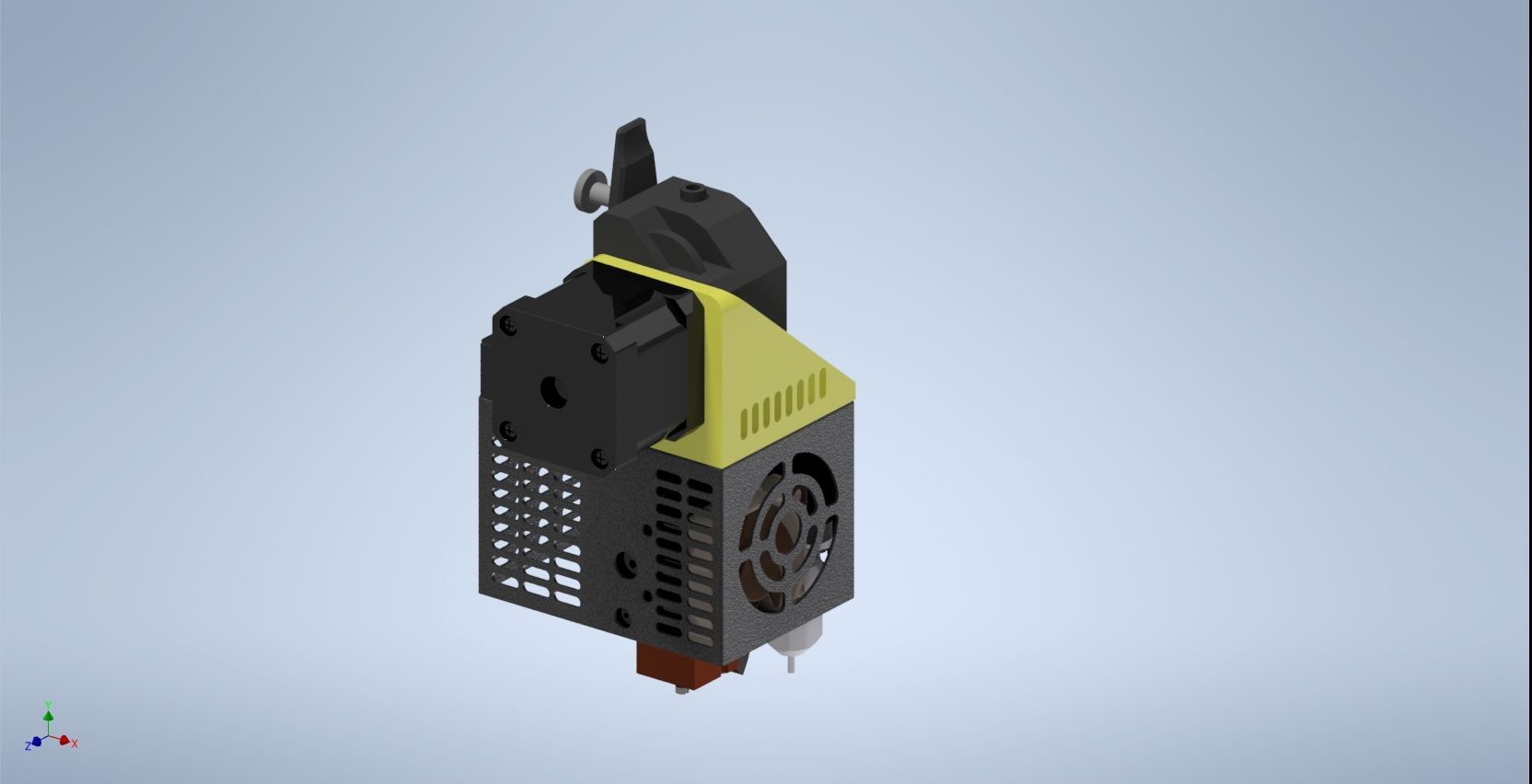
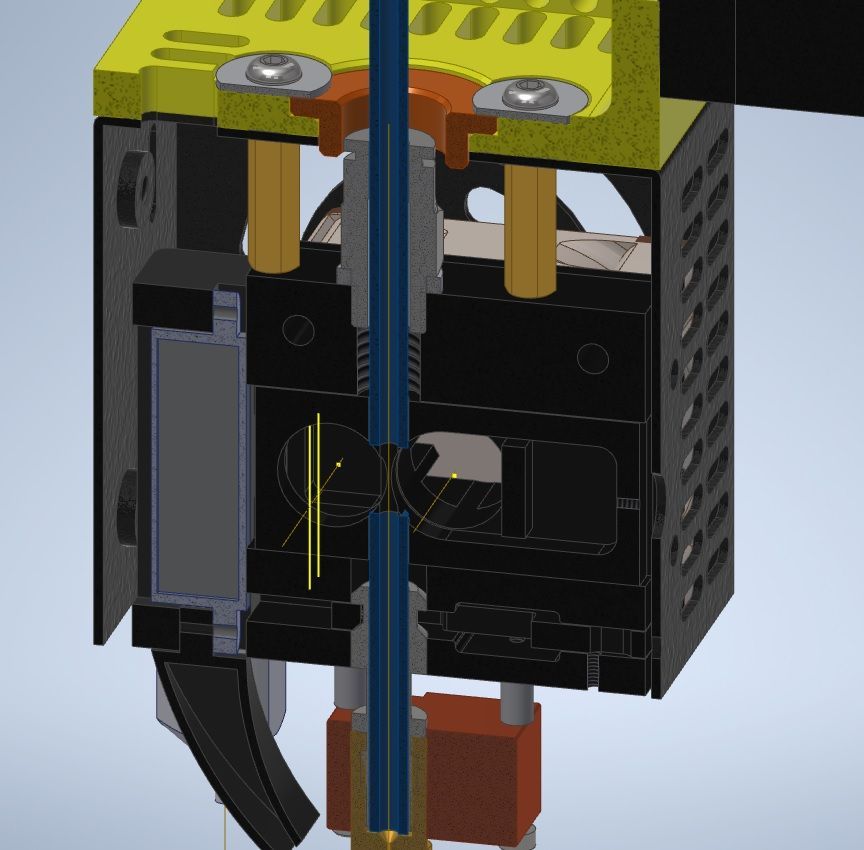
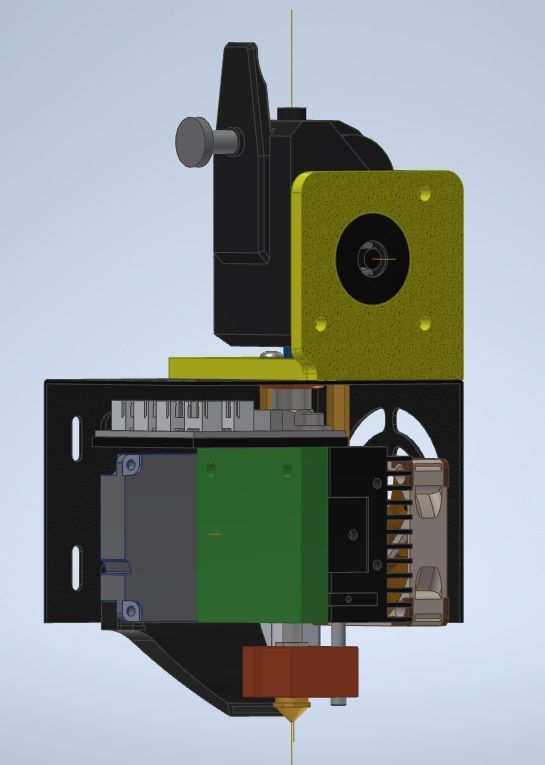
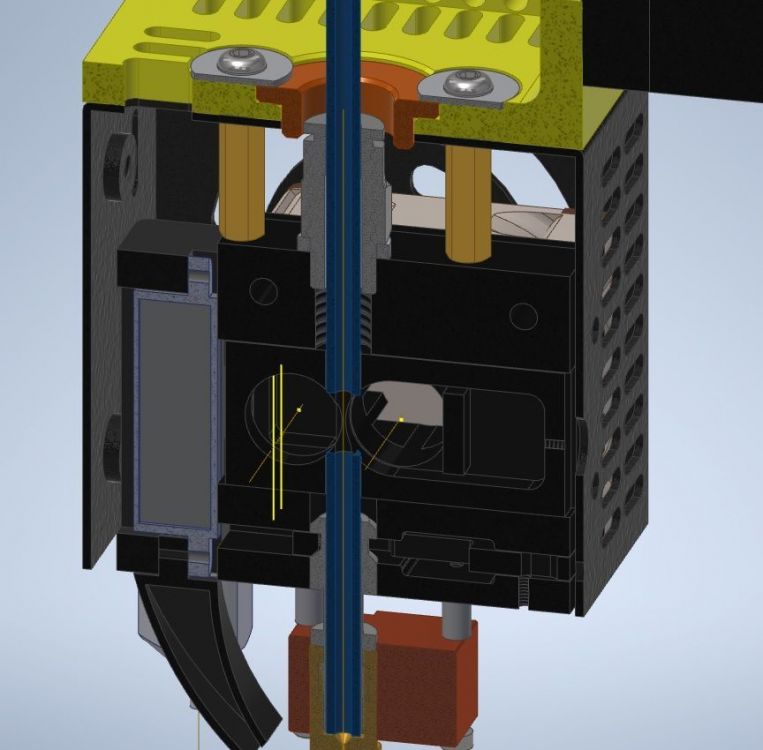
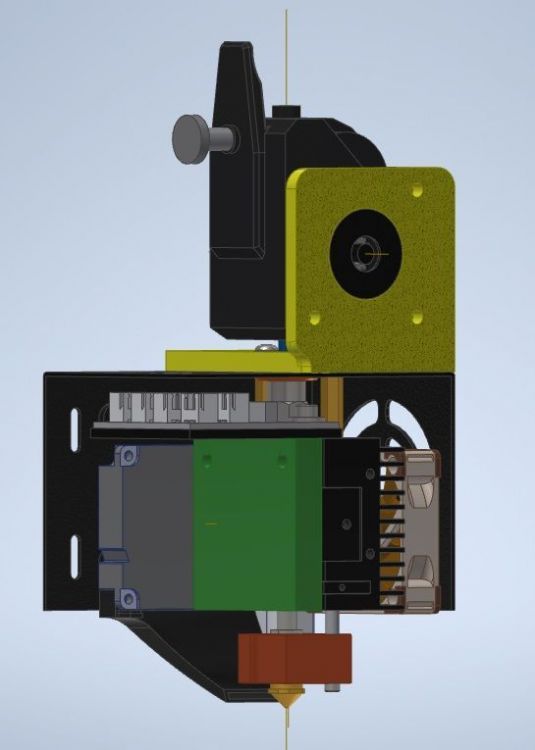
Lassé de l'instabilité des extrudeurs, j'abandonne et je passe à des BMG. Les moteurs d'origine sont conservés, même si des pancakes allègeraient chaque tête, mais l'objectif est la fiabilité ! Pour la tête de gauche j'utilise un BMG avec une coque Trianglelab v2. Pour la tête de droite, il faut une version miroir pour laisser l'espace au connecteur de la nappe. Malheureusement, je n'avais que des version "Right Hand". J'ai commandé une version "left hand" métal, et les dimensions sont évidemment différentes (20mm de l'axe d'extrusion au plan moteur pour 23mm selon Bondtech). Ce qui implique des supports différents pour chaque tête ! Pour la fixation du support, j'utilise les 2 vis M3 supérieures qui se vissent dans les colonnettes en adaptant leur longueur. Pour rigidifier l'ensemble, j'ai une rondelle qui fait office de centreur, ajusté au support (jaune) dans sa partie supérieure, et vient s'ajuster dans l'alésage de la cage (noir) de la tête. Deux rondelles larges dia 3mm viennent brider ce centreur (orange) : L'extrudeur d'origine est neutralisé en démontant simplement le roulement d'appui sur le filament. Ainsi avec le ressort, la pièce reste en place et le PTFE de la buse garde son positionnement, et le PTFE supérieur vient s'y loger comme à l'origine, maintenu par le pneufit d'origine. Sa partie supérieure s'engage dans l'extrudeur BMG. Le NEMA17 étant utilisé sur le nouvel extrudeur, une contre plaque (vert) remplace le moteur et maintient le tiroir coulissant de l'extrudeur d'origine : Le montage permet de garder le système de buse d'origine et chaque tête est alourdie d'environ 35g + 92g de BMG ! Vu le poids déjà conséquent des têtes, mieux vaut alourdir un peu pour fiabiliser ! Il ne semble pas possible de monter un extrudeur Orbiter, du moins dans sa version 1.5, sans modification plus importante (modification de la cage, etc...).

 1 point
1 point -
Salut @Ironblue Voila M'dame! Mono X profile.lyp1 point
-
Oui, normal, car j'ai piqué cela des devises Shadok
 1 point
1 point -
Bonjour, Dans Cura regarde à Remplissage>Motif de remplissage>Concentrique En jouant sur la densité du remplissage. Tu regardes dans Aperçu si ça colle plus à ce que tu cherches à obtenir1 point
-
ha ca ma cassez le noisette je t'avoue la pas sur qu'il en reste assez pour faire de "futur generation" surtout que une fois reussi me suis juste demandez pourquoi j'avais pas cree une virtualbox1 point
-
Cela me fait penser a un défaut de tension de courroies (où c'est que je viens juste de voir le super système de tension des courroies de methylene67 pour sa tenlog) ou alors tu a un jeu dans la structure de l'imprimante (cf "depuis quelques jours") Ou sinon, tu n'aurai pas déplacer ton imprimante sur un support moins plant et/ou moins stable ? où fait un truc sur l'imprimante juste avant ses "depuis quelques jours" ? Mais les pistes des corrections proposé par methylene67 sont aussi a explorer !1 point
-
Merci à vous deux, La préchauffe était un premier élément de réponse. Une fois l'extrudeur préchauffé => quand je veux faire bouger le moteur de l'extrudeur j'ai un mouvement de va et vient (surement un souci sur le câble du coup) Une fois l'extrudeur préchauffé, je connecte le moteur d'extrusion à la trigorilla en utilisant un câble direct => ça fonctionne enfin! Je vais prendre le temps de refaire un faisceau de câble correct demain et tout devait rentrer dans l'ordre. A ceux qui cherchent un solution à un problème similaire, à ajouter à la phase de teste initiale : ---> Prendre le temps de tester le câble qui relie la carte mere au moteur (en lieu et place de celui de l'axe X par exemple). Merci pour votre aide gerardm et PPAC. Ma 4Max est repartie pour un tour!1 point
-
Pour le FEP je conseille de le nettoyer avec des disques à démaquiller 100% coton. Le sopalin a tendance à rayer le FEP.1 point
-
Ca c'était le truc à avoir. C'est nickel, ça enlève quasiment tout le plastique, à utiliser même sans changement de buse comme à l'occasion si tu as une mauvaise extrusion. Contrairement à un extrudeur en bowden, la tenlog c'est que du bonheur, pas d'étanchéité à refaire, les buses se changent super facilement et pas de fuite (en 2 mois d'utilisation en tout cas et quelques changement de buse).1 point
-
Merci et effectivement avant d'avoir une imprimante je faisais des modelages en Sculpey...
 1 point
1 point -
Bonjour à tous, L'assemblage de la pieuvre sur un coffre. Le montage c'est fait avec de la colle cyano et de la pâte milliput (les parties blanches) Il y a bien entendu encore du ponçage et de la finition.


 1 point
1 point -
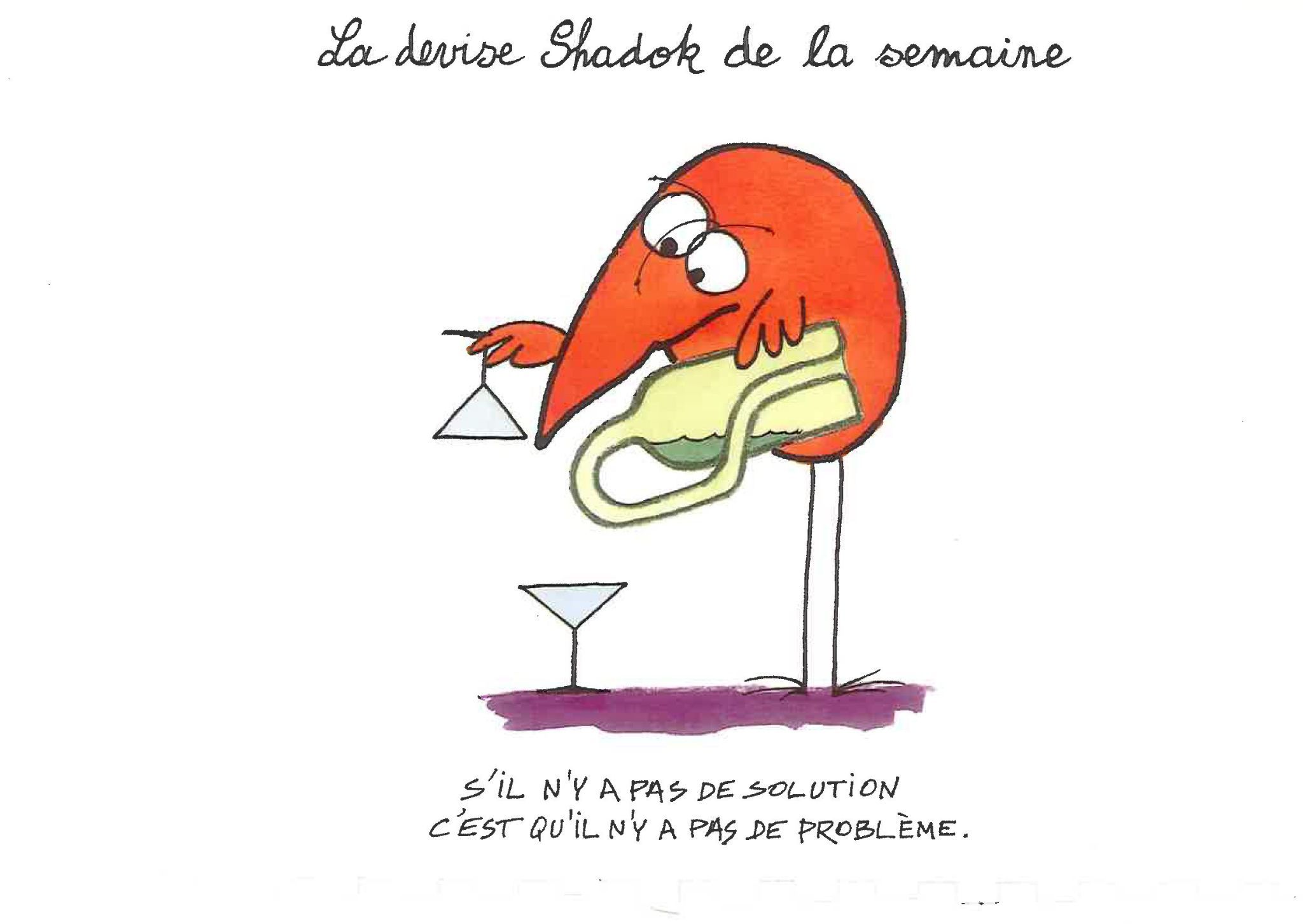
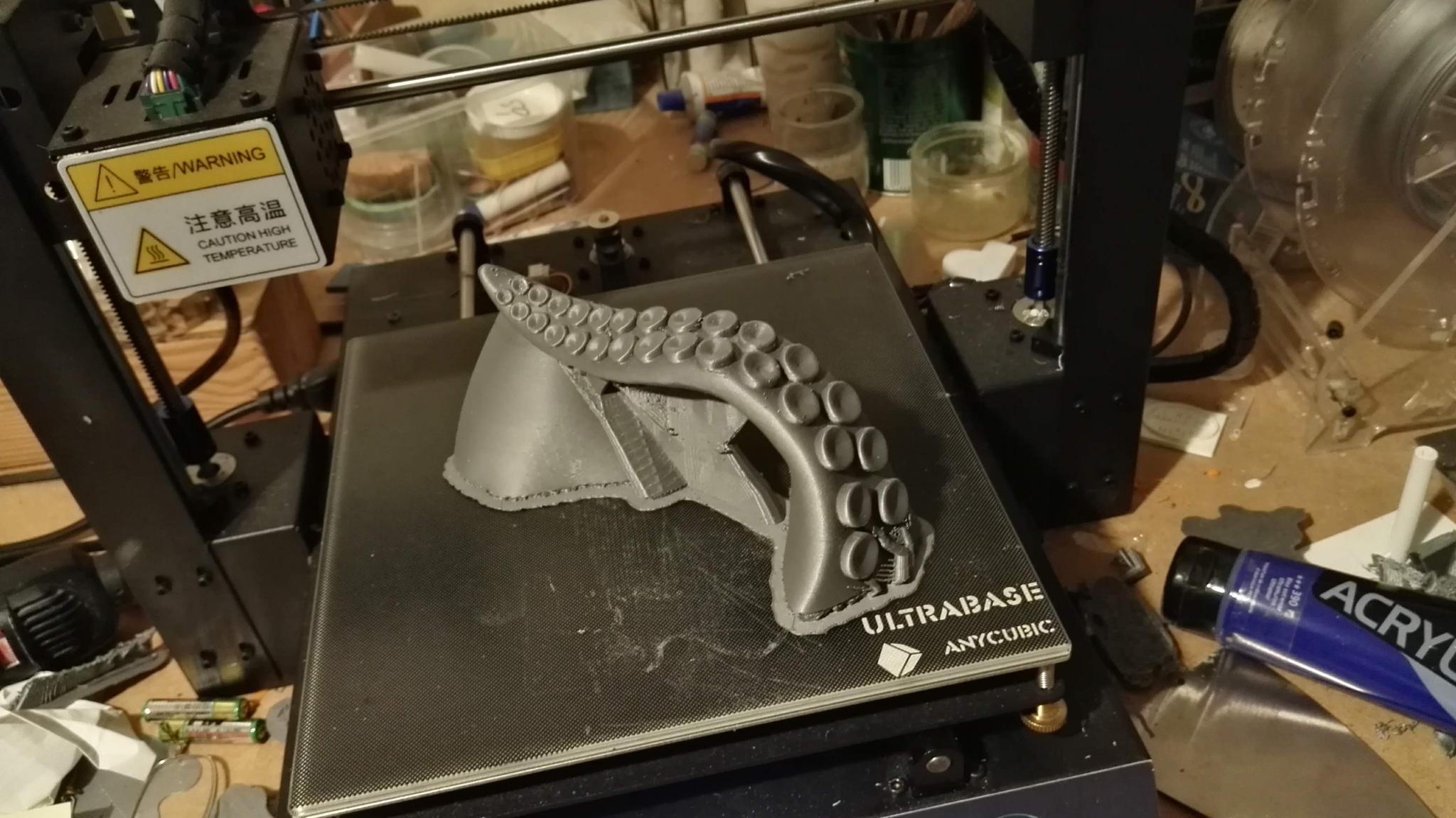
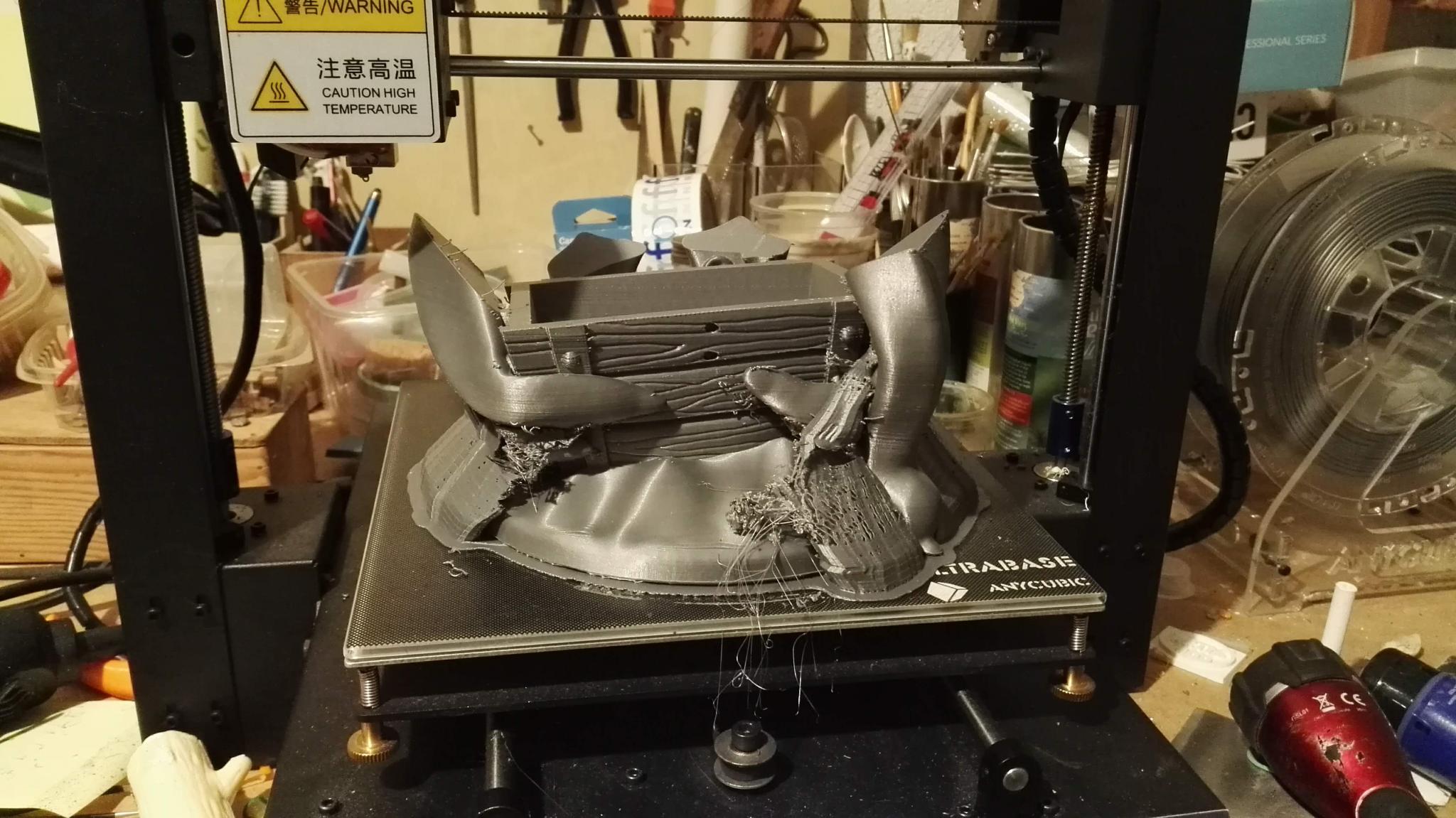
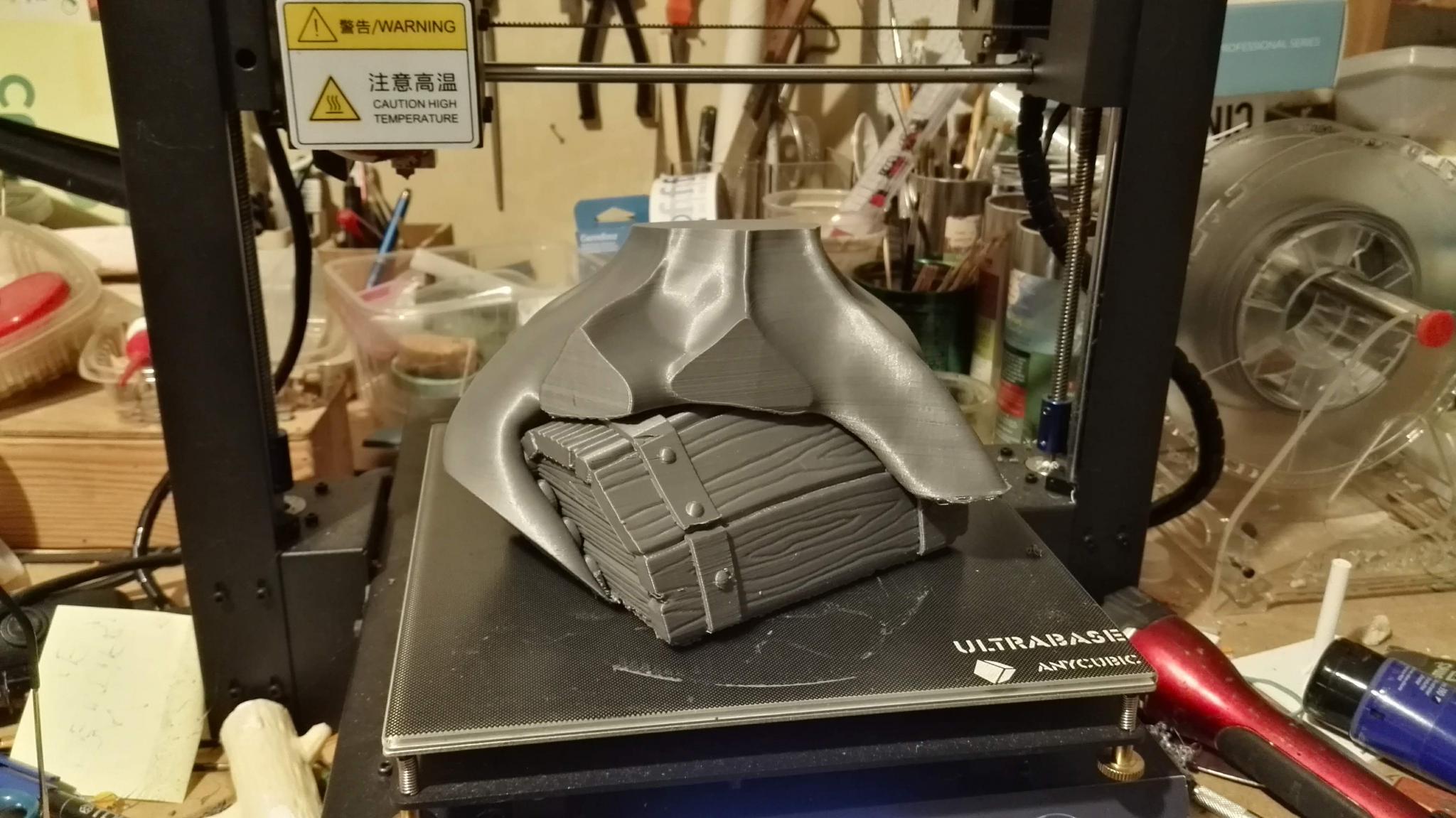
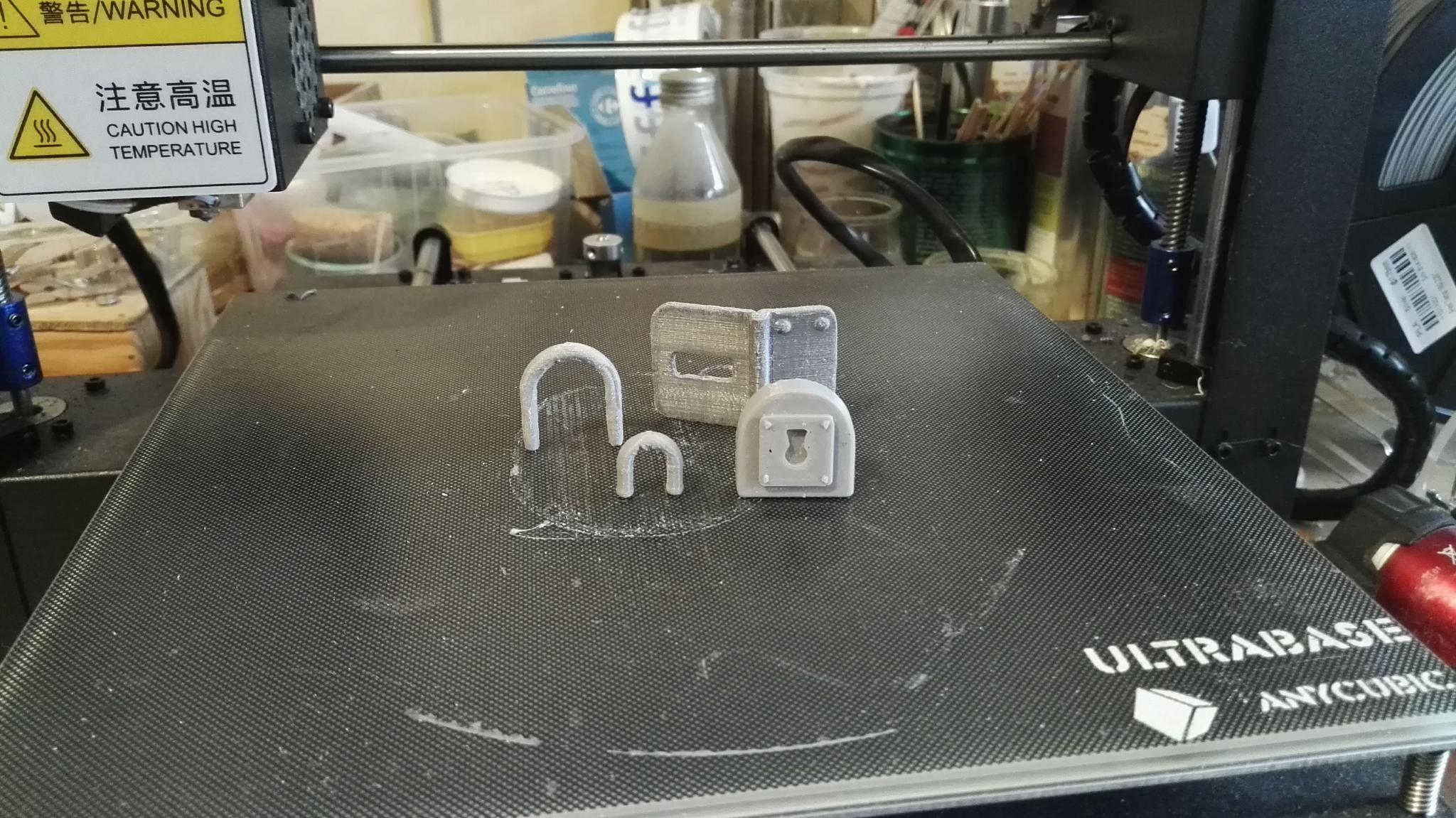
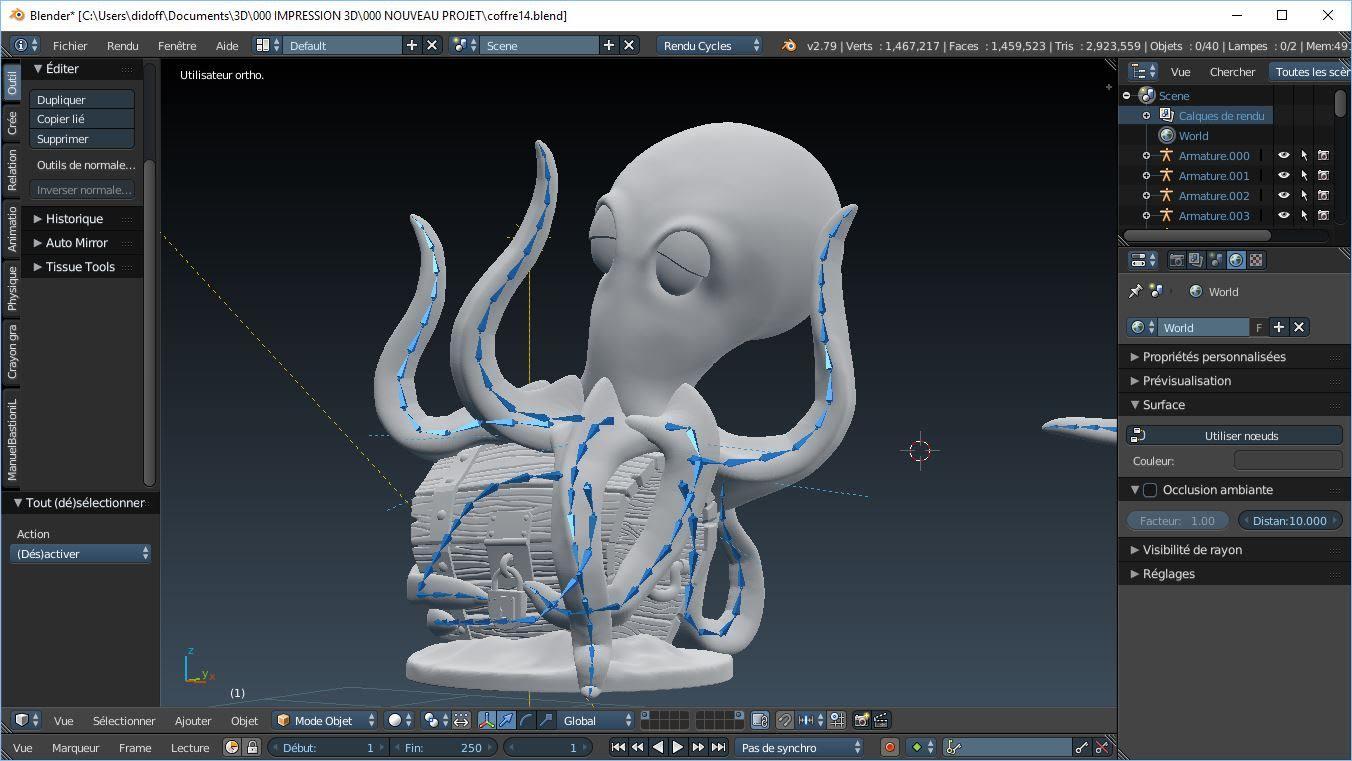
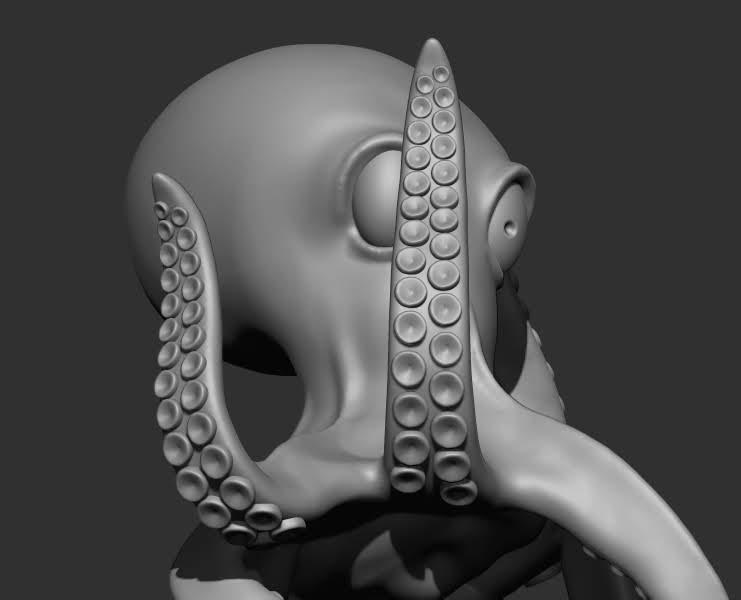
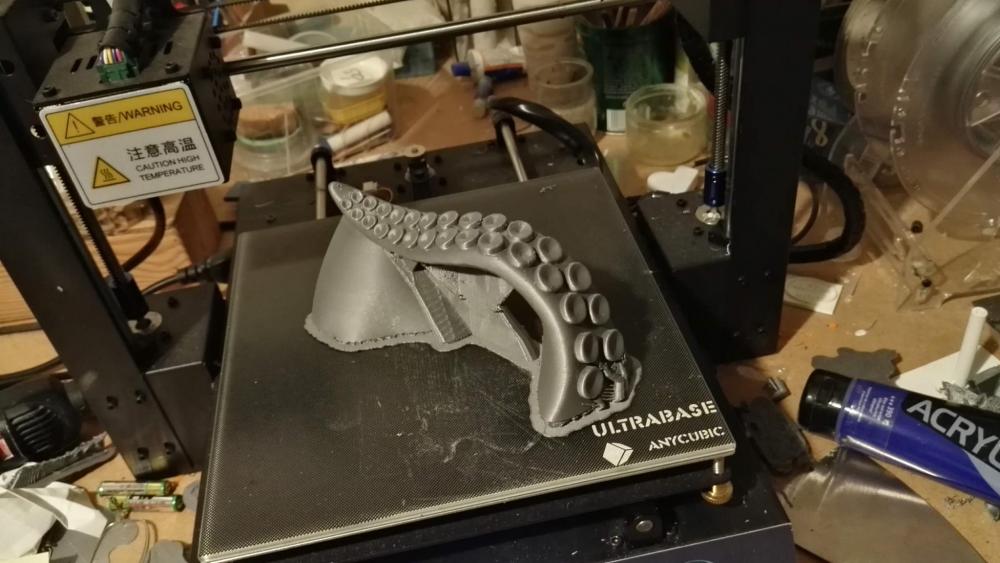
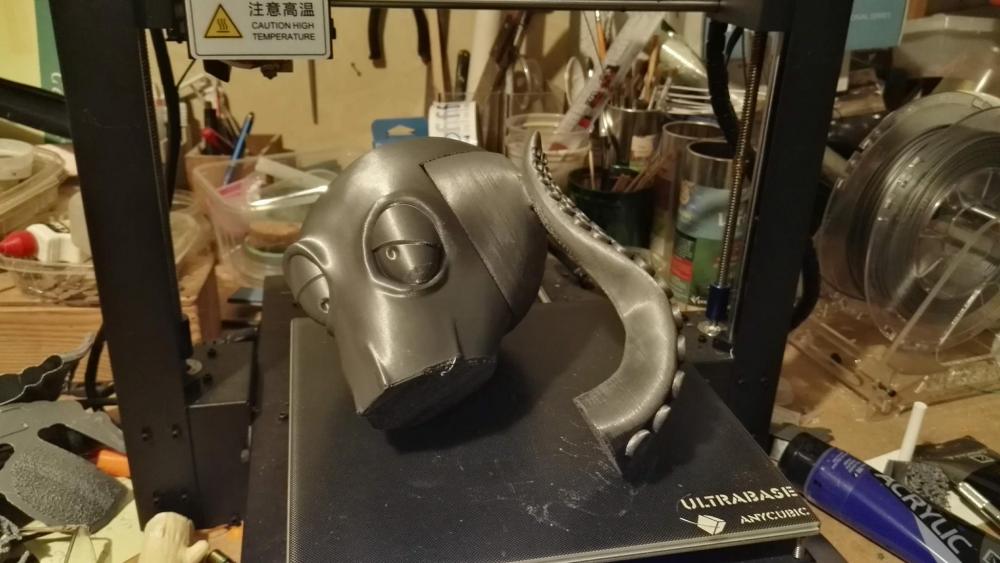
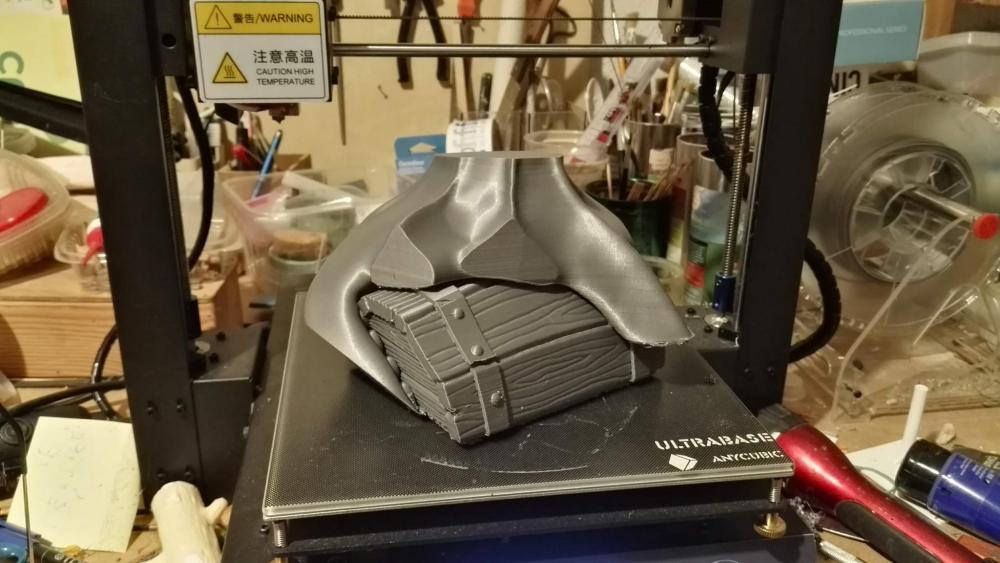
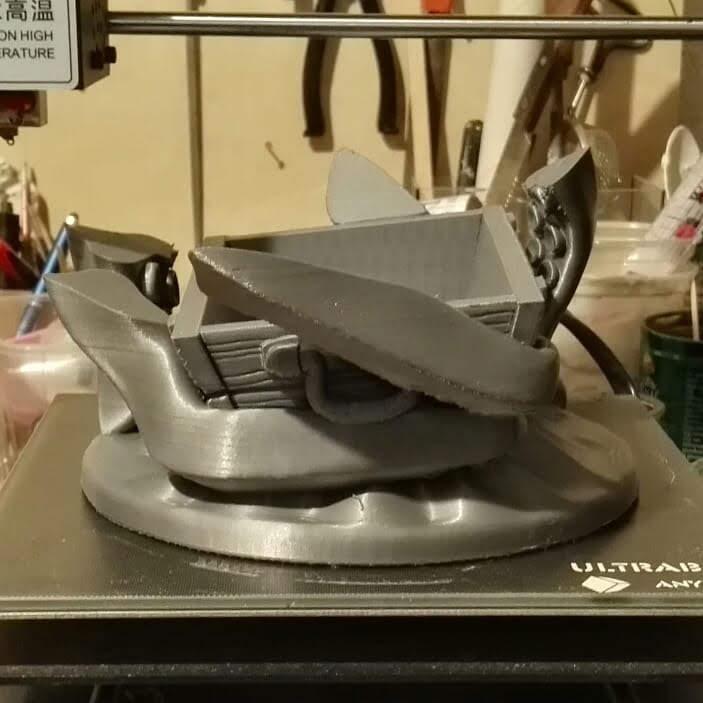
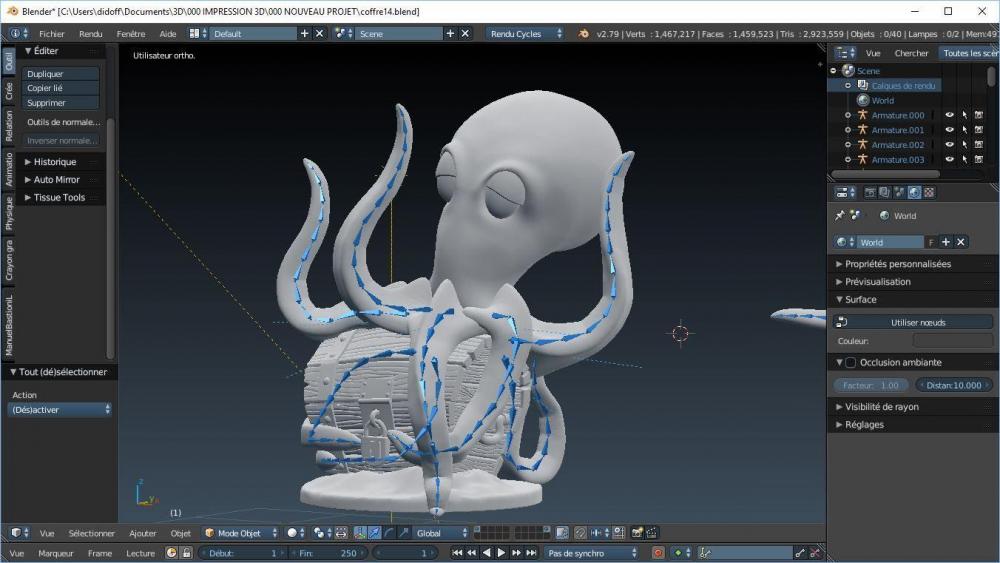
Bonjour à tous, Ma nouvelle impression est encore une pieuvre, bien plus grosse et plus complexe à réaliser et imprimer... Le coffre a été fait avec Blender, la pieuvre avec Zbrushcore et Blender... 150 ventouses plus tard tout était prêt pour l'impression. Comme je l'ai déjà dit, la pièce est grosse et assez complexe j'ai donc opté pour une impression en pièces détachées. Environ 12 heures d'impression pour ces deux tentacules. Celle-ci, avec un morceau de la tête a mis 14 heures pour être terminée. 49 heures d'impression pour la tête. Le socle avec le coffre et tout un tas de bouts de tentacules terminés en 58 heures... Le gros morceau, le couvercle du coffre et le corps de la bête, 62 heures d'impression... Et pour finir le cadenas et le système de fermeture. Je suis maintenant en train d'assembler tout les morceaux.









 1 point
1 point -
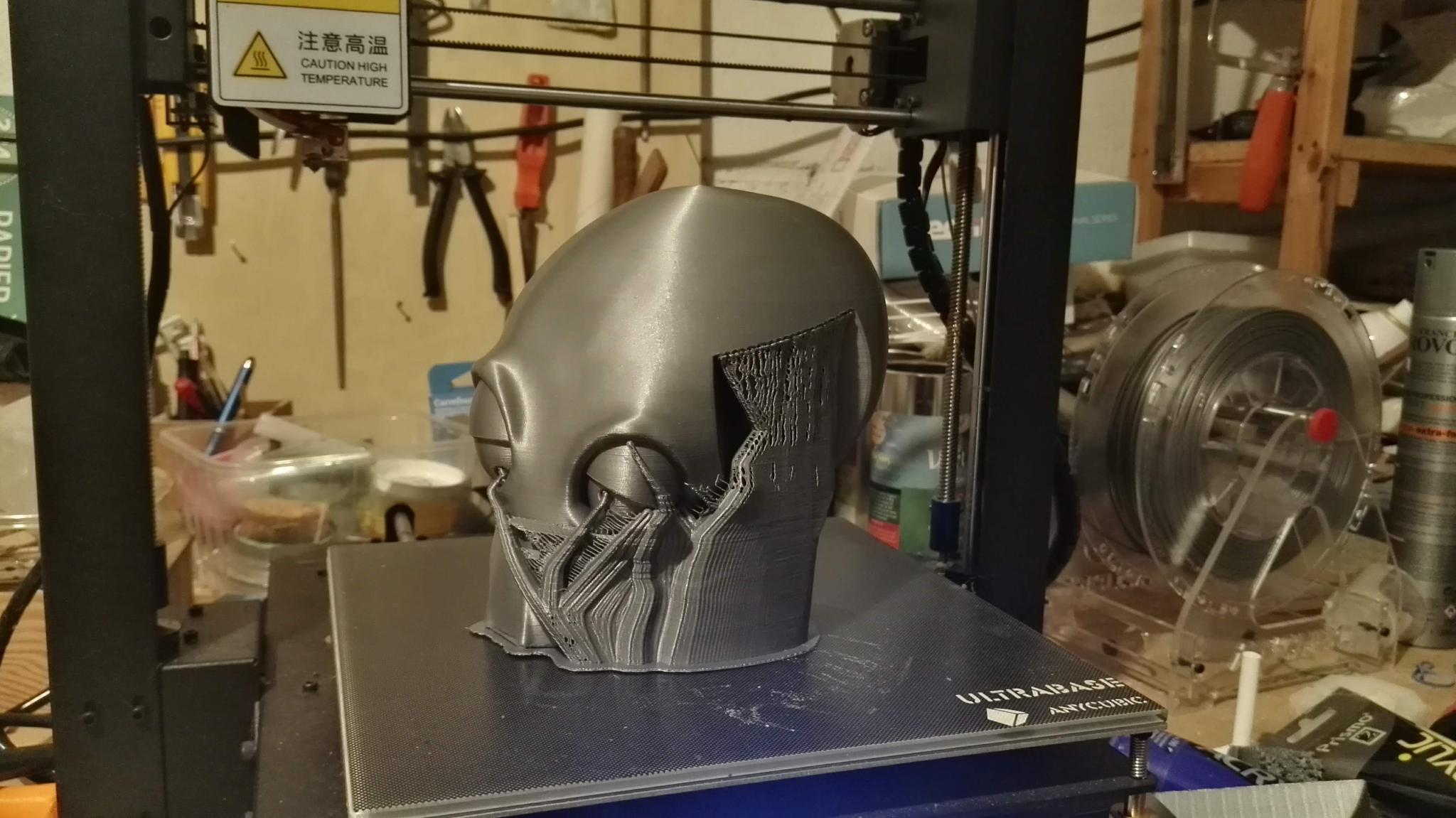
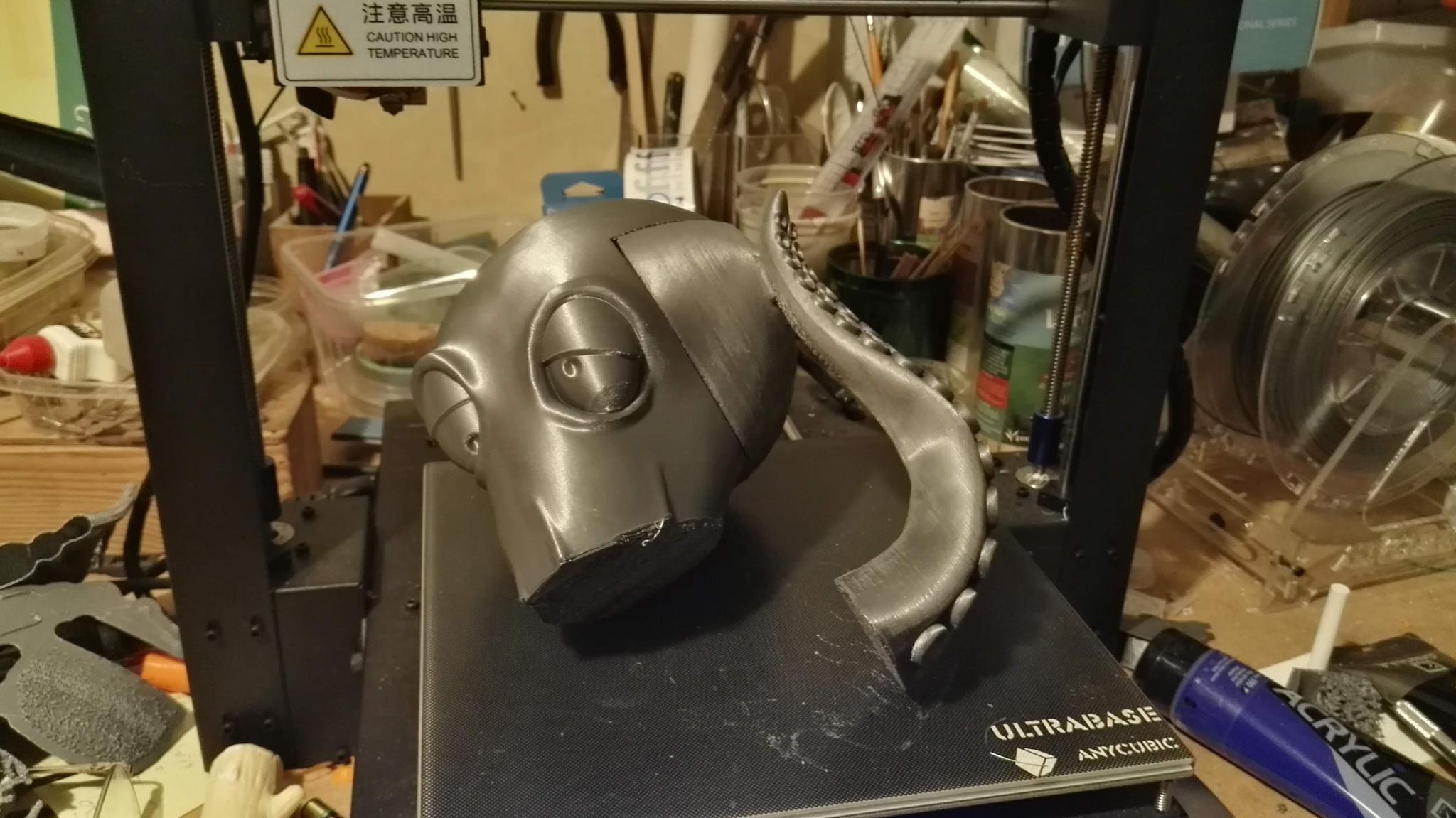
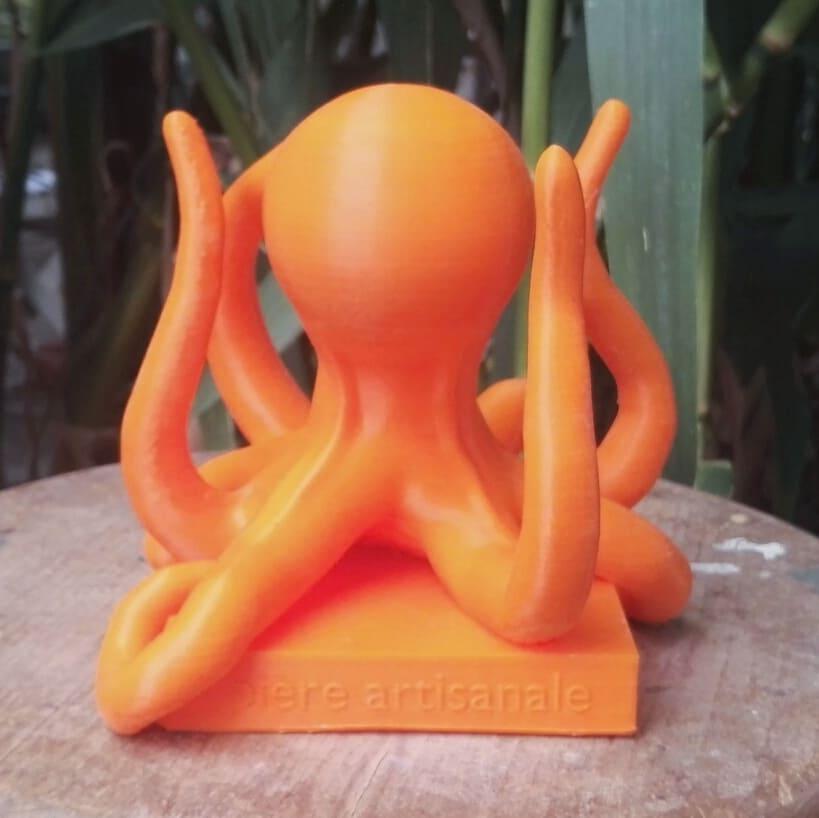
Bonjour à tous. Voici ma dernière création, j'ai eu moins d'une semaine pour la modéliser avec Zbrush et pour l'imprimer. Pris par le temps je n'ai pas pu aller trop dans les details, notamment les ventouses des tentacules... Donc pour commencer la version réalisée avec Zbrush. Après une quarantaine d'heures d'impression voici la bestiole, elle fait un peu moins de 14 cm de haut.



 1 point
1 point -
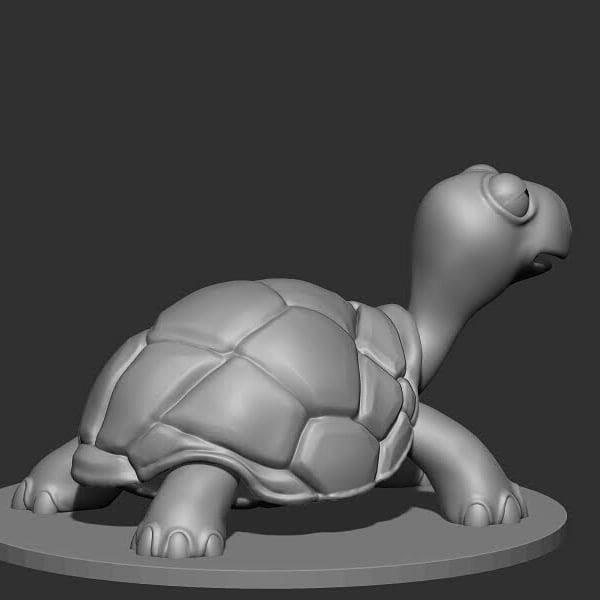
Oui des fois je fais ça...en fait pour la tortue ce n'est qu'une partie du projet, il y a un deuxième animal qui va avec et que je suis en train de modéliser... En attendant voici la tortue assemblée Dimensions de la bête montée, 21 cn de long pour une hauteur de 13 cm...



 1 point
1 point -
Bonjour à tous, Nouvelle sculpture réalisée avec Zbrush... Cette fois l'impression à été faite avec support et en 7 pièces, la carapace, le dessous de la carapace, la tête et les pattes.. J'ai aussi changé de filament, toujours la même marque (Neofil 3D) mais en couleur argent, le rendu est meilleur, les couches d'impression se voient beaucoup moins... La carapace en cours d'impression, cela a pris environ 24 heures... Au total l'impression aura durée un peu plus de 42 heures...(hauteur de couche 0.1) La carapace fais 15 cm de long, la bête une fois montée devrait faire un peu plus de 20 cm de long. Cela ne se voit pas trop sur la photo, mais j'ai imprimé 2 pattes avant gauche...la patte avant droite est en cours d'impression (1 h 30 de plus !) L'intérieur de la carapace après élimination du support,pas besoin de fignoler plus, ça ne se verra pas une fois tout assemblé... Prochaine étape le ponçage, du fait de l'impression en filament argent ça va être plus rapide...






 1 point
1 point -
Merci a tous, voici la pièce terminée après une bonne séance de ponçage avant la peinture... La lumière lors des prises du vue n'était pas très bonne et les photos sont pas top...




 1 point
1 point -
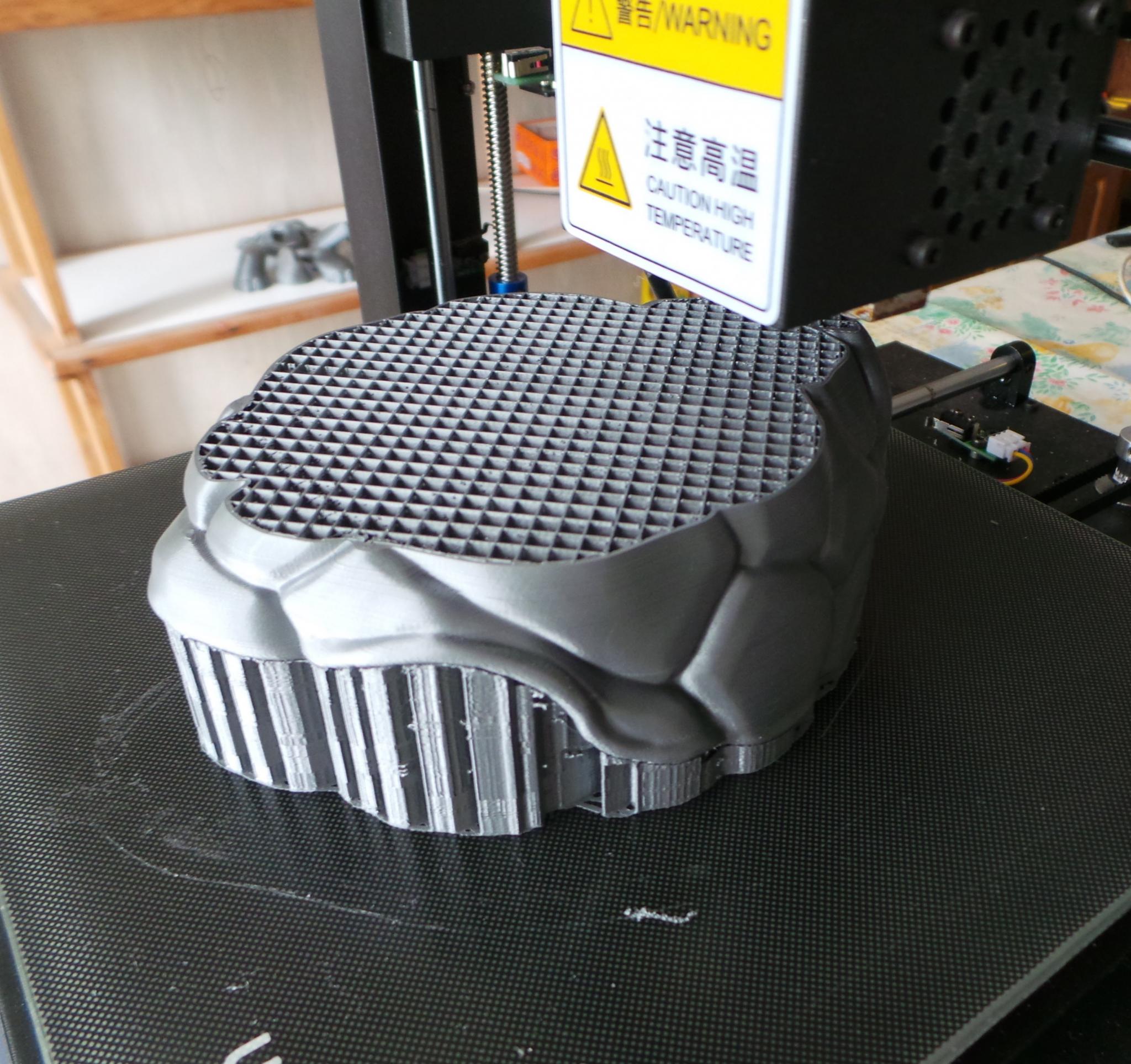
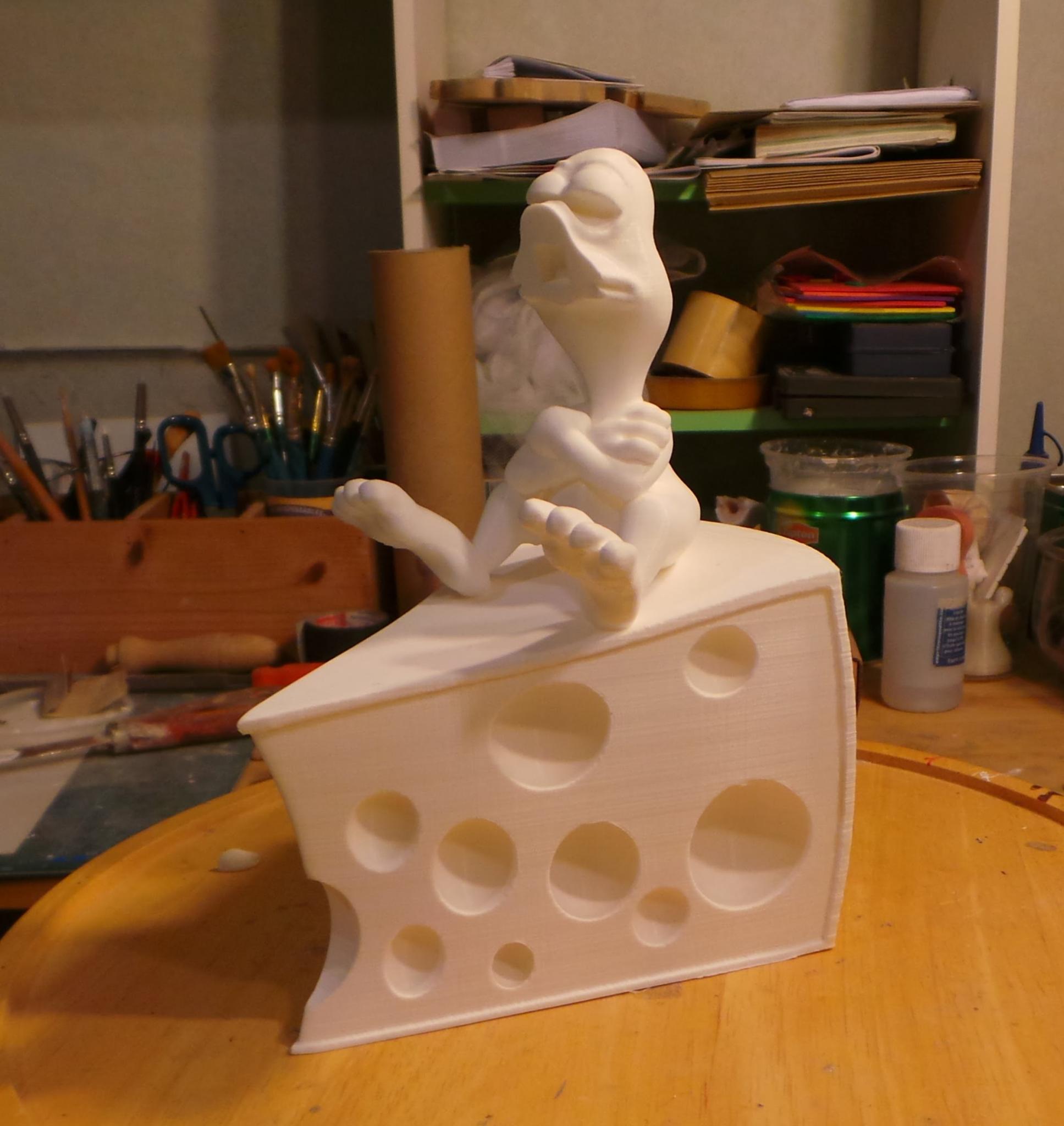
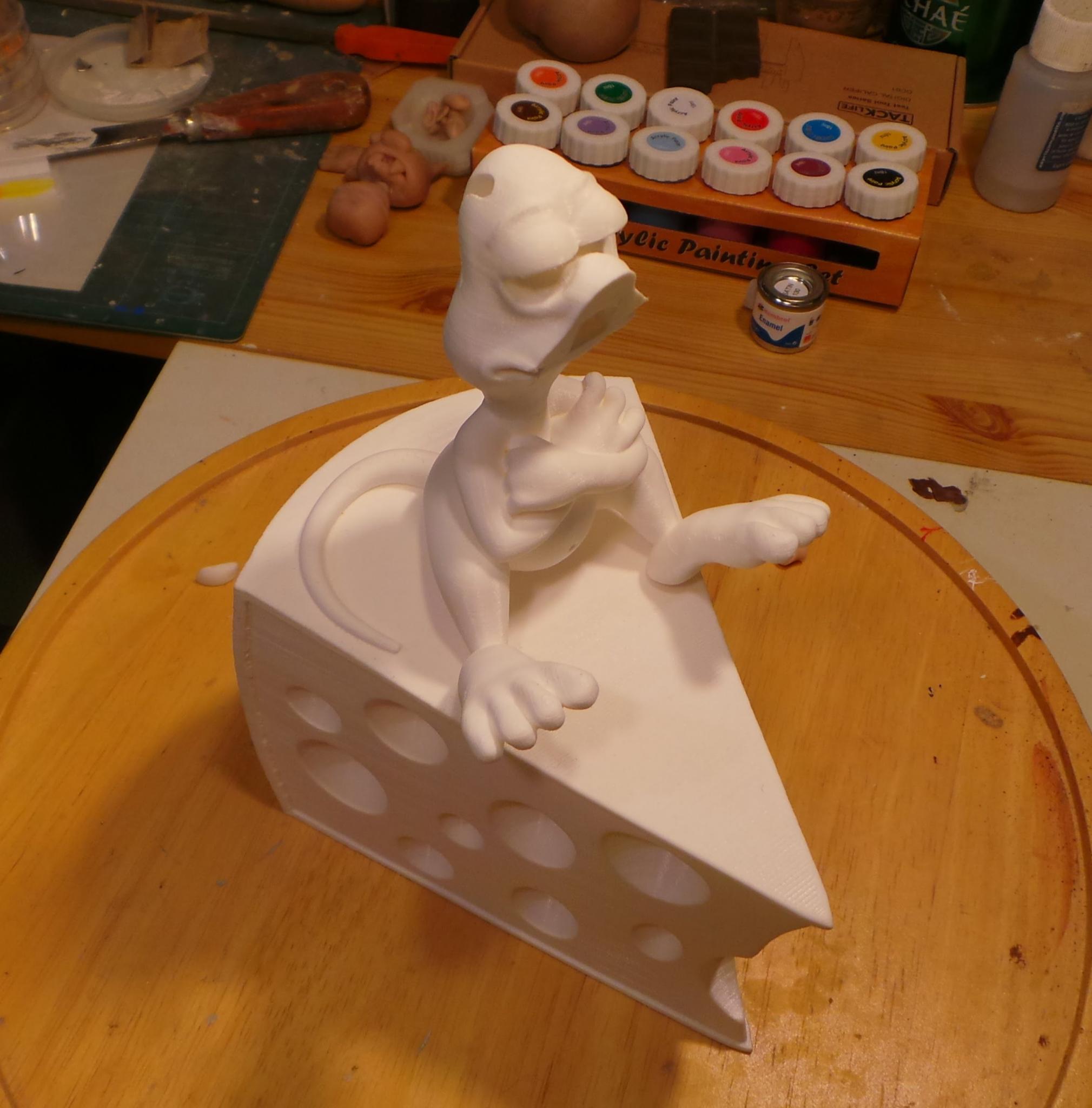
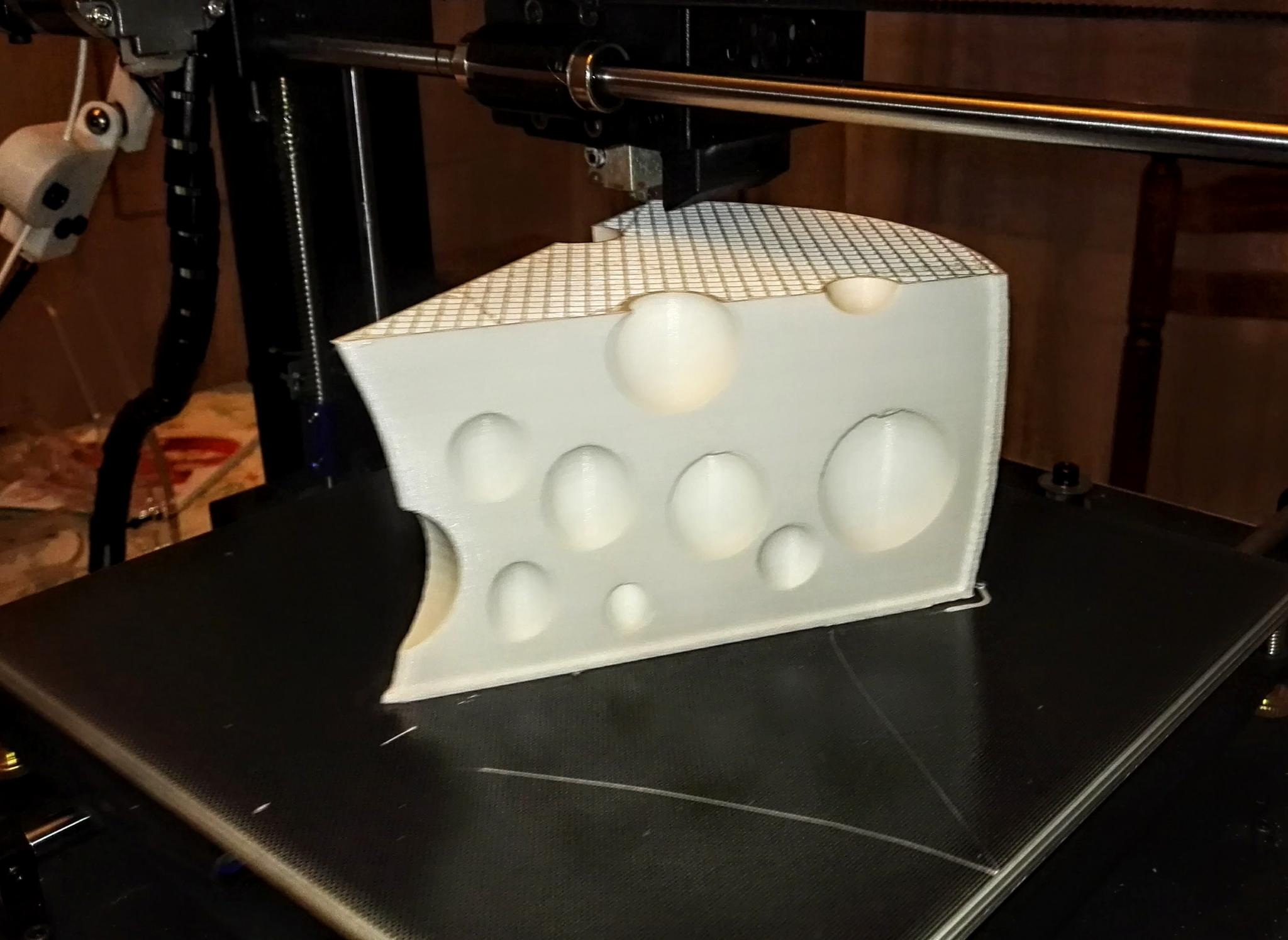
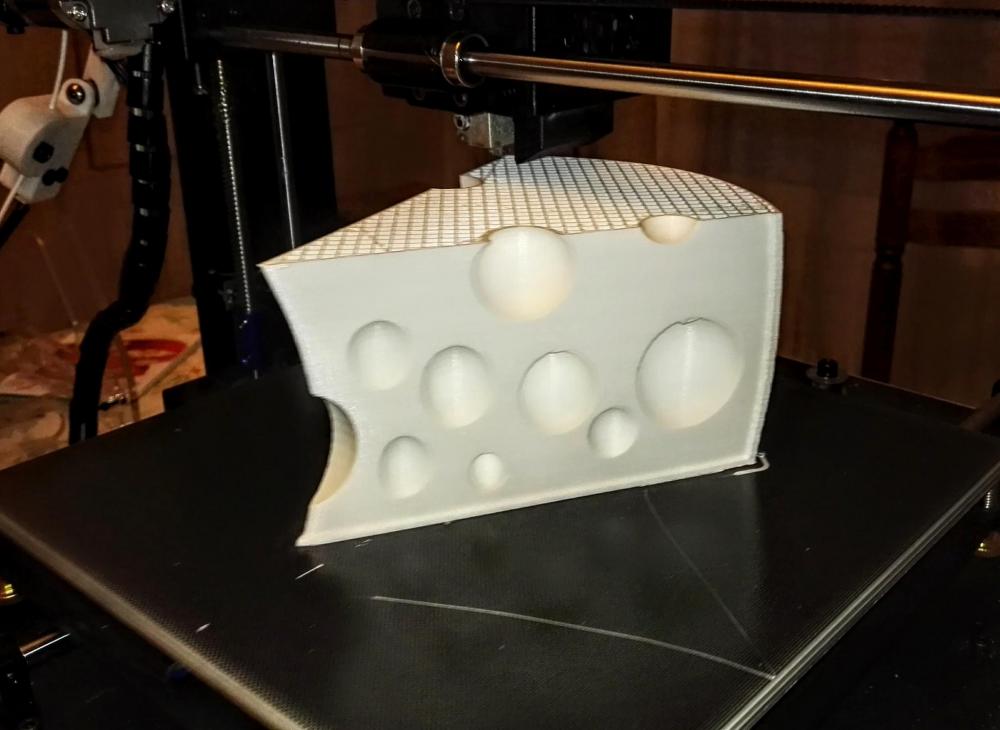
Bonjour à tous, Voici ma dernière création... J'ai modélisé le fromage avec Blender, le rat avec Zbrush... Le fromage en cours d'impression...Jusque là tout va bien. La pièce fait environ 20 cm de haut, l'impression a pris un peu plus de 35 heures, 32 heures pour la partie principale. Imprimée sur une Anycubic l3 mega. L'impression (sans support) a été faite avec du Néofil à 200 degrés (plateau chauffant à 60), couches de 0.1. Le résultat est plutôt satisfaisant malgré quelques bavures dans les parties difficiles notamment sous la plante des pieds, mais rien d'insurmontable à réparer. Petit problème (là c'est une erreur de ma part), si vous avez bien observez les photos vous avez surement constaté qu'il n'avait pas d'yeux ! J'ai oublié de les joindre au corps quand j'ai enregistré le fichier pour l'impression. Oups ! Je m'en suis bien entendu aperçu en fin d'impression, donc j'ai du les imprimer à part avec le nez et les oreilles qui eux étaient prévus ainsi... Prochaine étape, ponçage et assemblage...








 1 point
1 point -
Merci à tous. Et voici la version peinte après ponçage et avoir passé plusieurs couches de la solution de lissage Optimus. Peinture acrylique



 1 point
1 point