Classement



Contenu populaire
Contenu avec la plus haute réputation dans 15/11/2018 Dans tous les contenus
-
Voilà ça avance tout doucement, c'est pas parfait, mais il va être fonctionnel, c'est le principal !!,


 5 points
5 points -
Yessss !! Hiiiiii... Mais j'ai oublié d'imprimer les boutons de réglage( +,-) Il va falloir que je surveille la cuisson en direct Fait c.... J'y ai pas pensé3 points
-
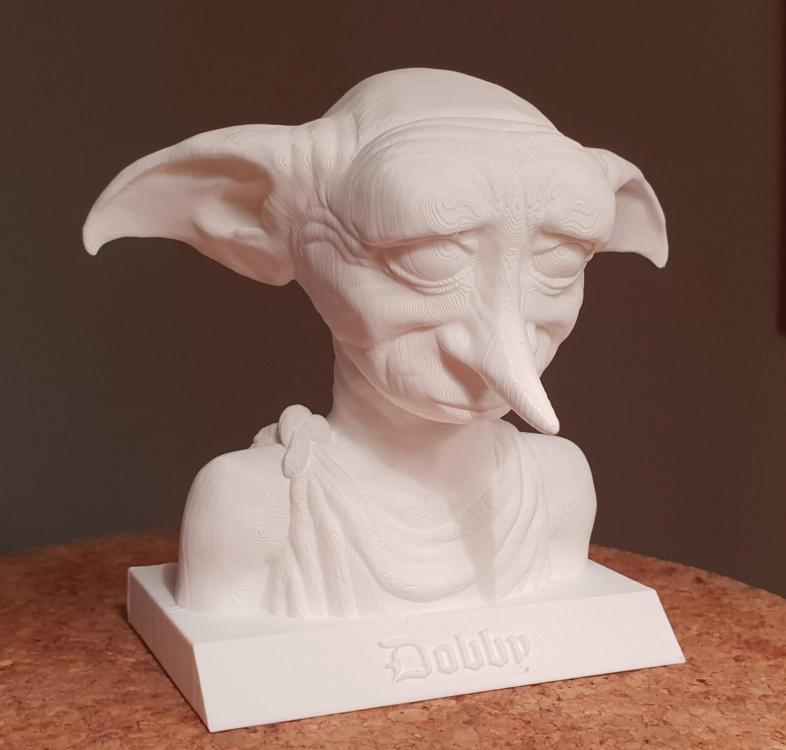
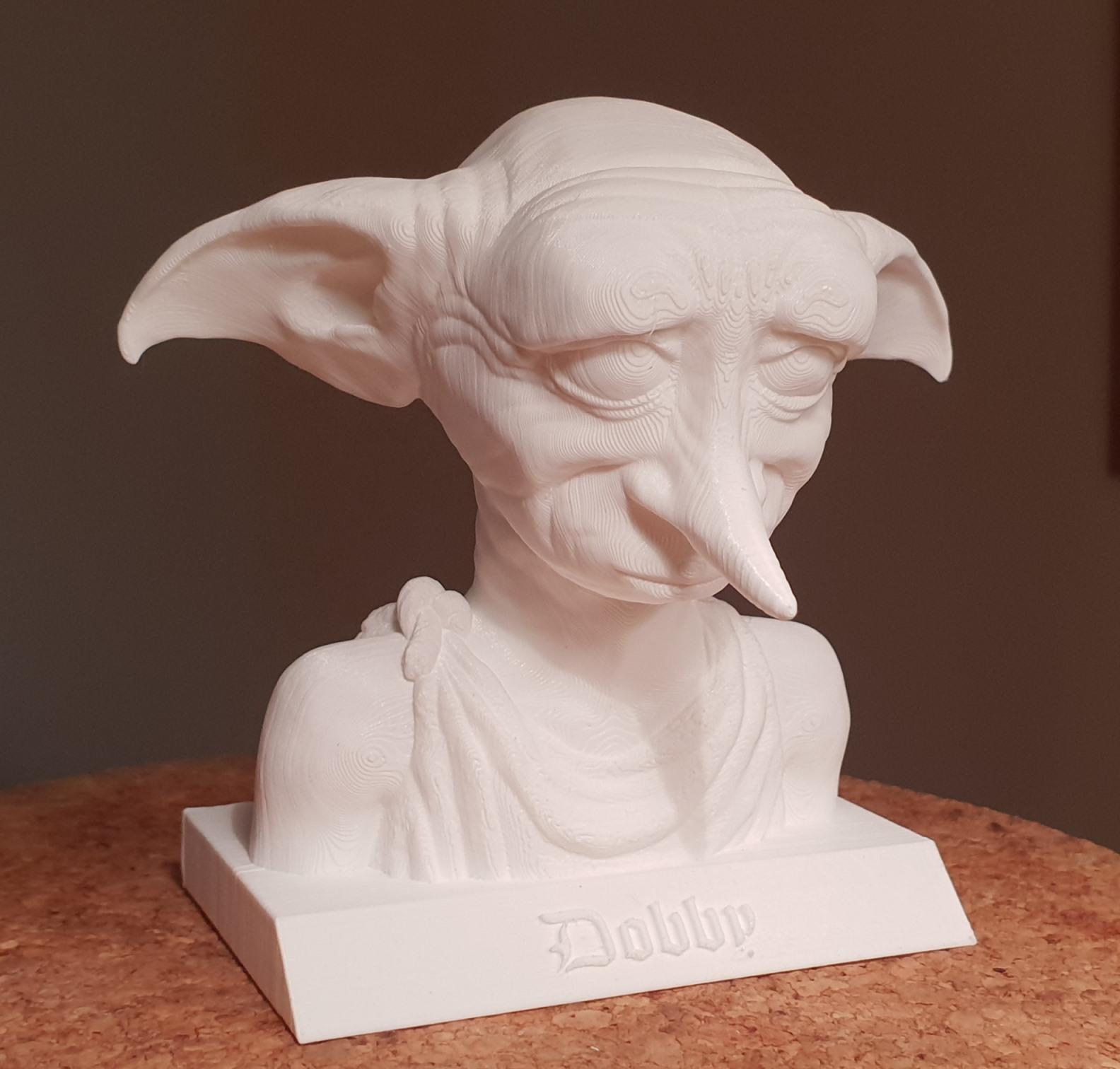
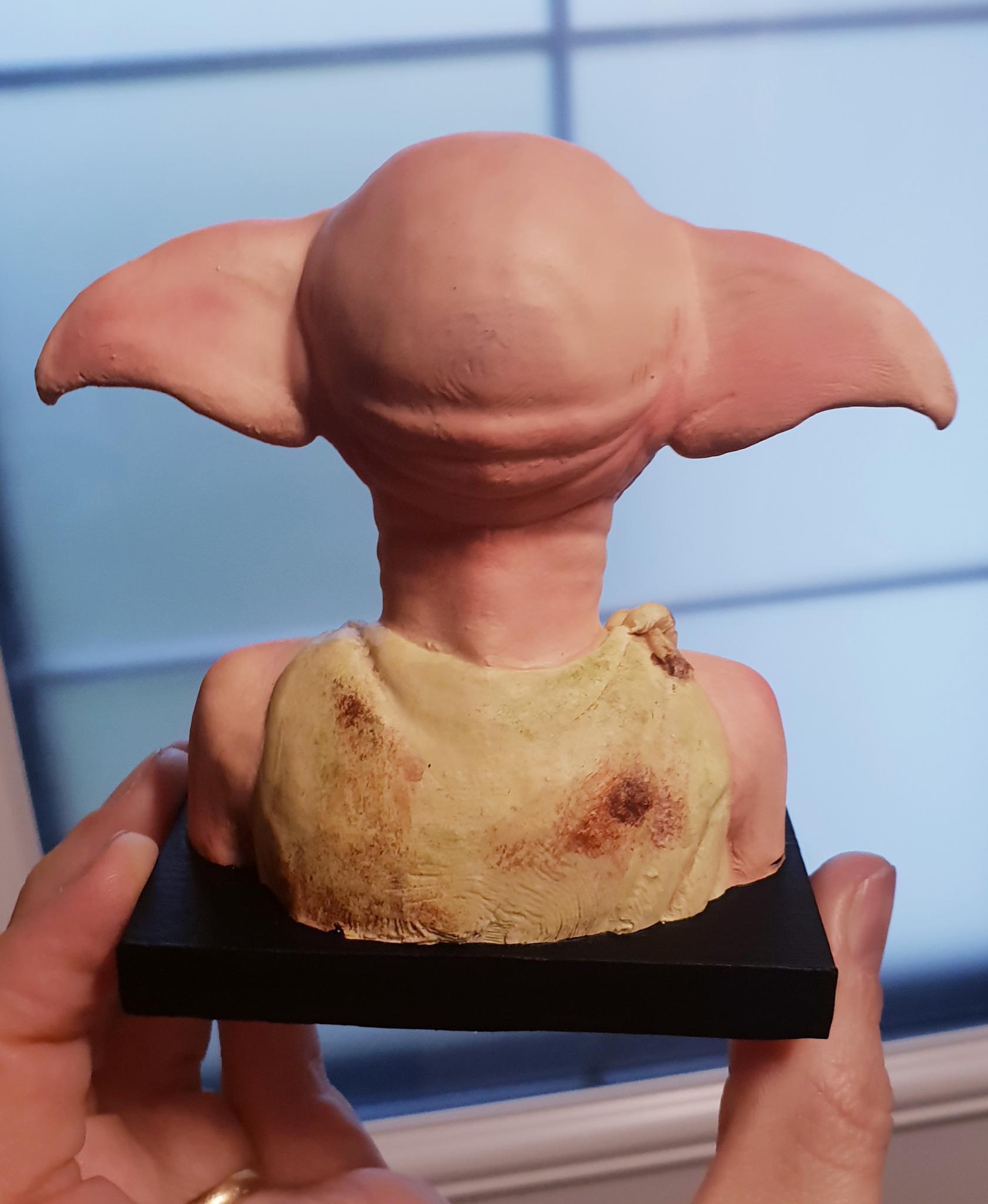
Bonjour, Voici une petite présentation d'un projet terminé : le buste de Dobby, l'elfe de maison dans la saga Harry Potter. J'ai utilisé "Sculptris" et "123D design" pour la modélisation. Le modèle à été pris à partir de photos et de vidéos trouvées sur internet. Pour la petite histoire ce sont les vidéos de @Lecaramel sur sa chaine polyscult qui m'ont motivé a tenter un truc. Je me suis lancé au hasard, et mon premier essai ressemblait à un gobelin. Je trouve que l'aspect caricaturale de ce genre de personnage permet plus facilement de reproduire un modèle, et je me suis donc dirigé vers le personnage de Dobby que je trouve sympathique. coté modélisation ça ressemble à ça : je l'ai ensuite imprimé (incliné) sur une Wanhao D7 : environ 9cm de haut Puis, pour faire plaisir à une amie, je lui ai imprimer (en plus gros et imprimer sur le dos) sur Prusa MK2S puis peint (bombe de lissage + aérographe + pinceau) : un peu déçu par les yeux! De mon coté le résultat me plait assez. Le cadeau à vraiment fait plaisir. Pour la modélisation, Il me reste encore beaucoup de progrès à faire et malheureusement très peu de temps de disponible. Prochain projet (si mes premiers tests sont correct): une fée clochette.
.thumb.png.e51da5bab24e617cc4e0d8e475ede9af.png)



 3 points
3 points -
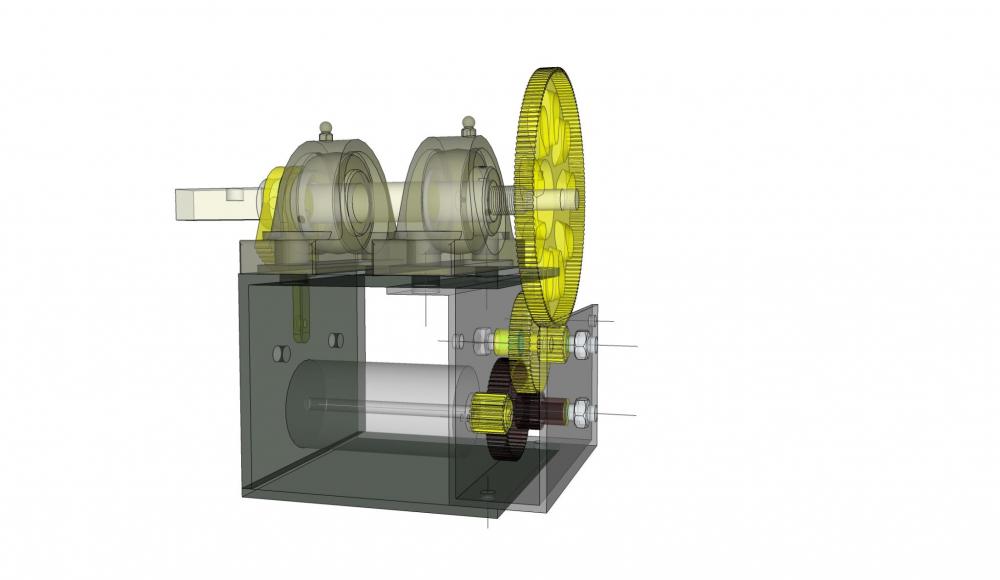
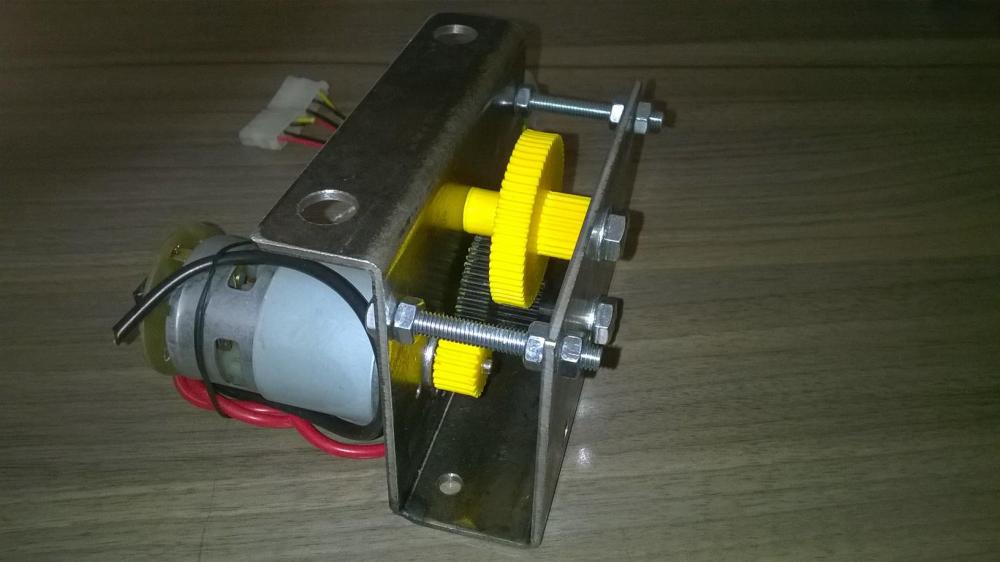
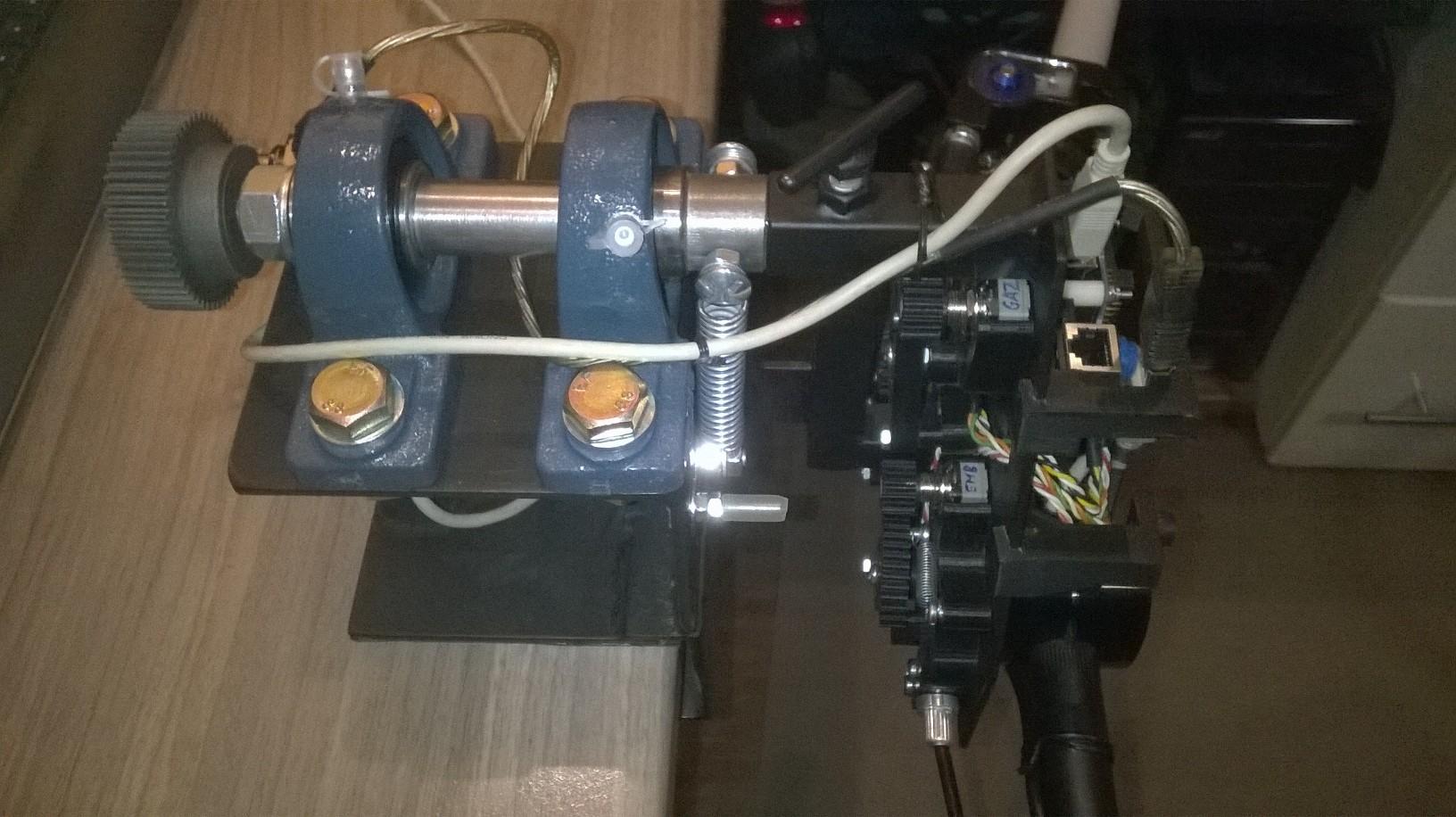
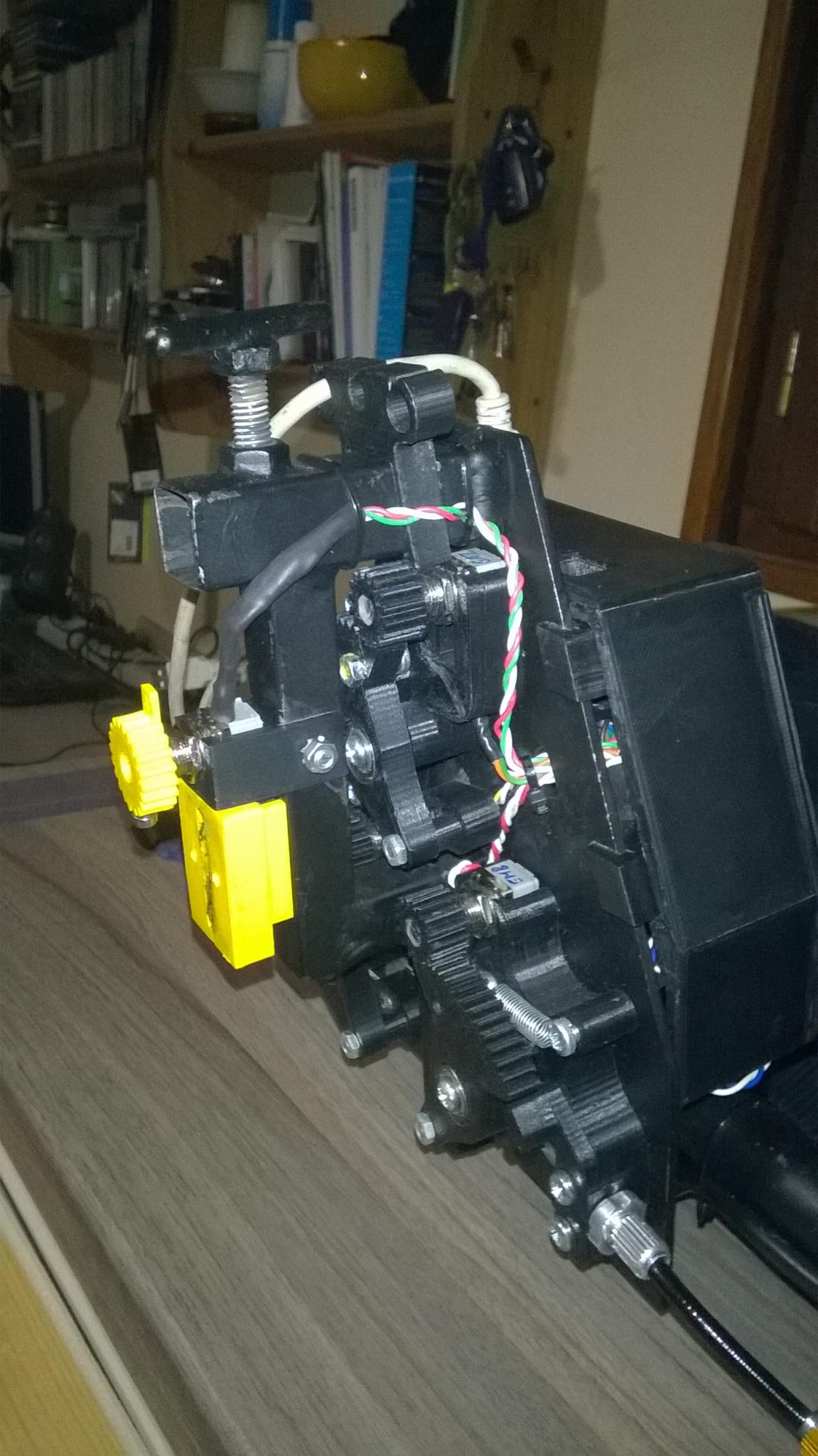
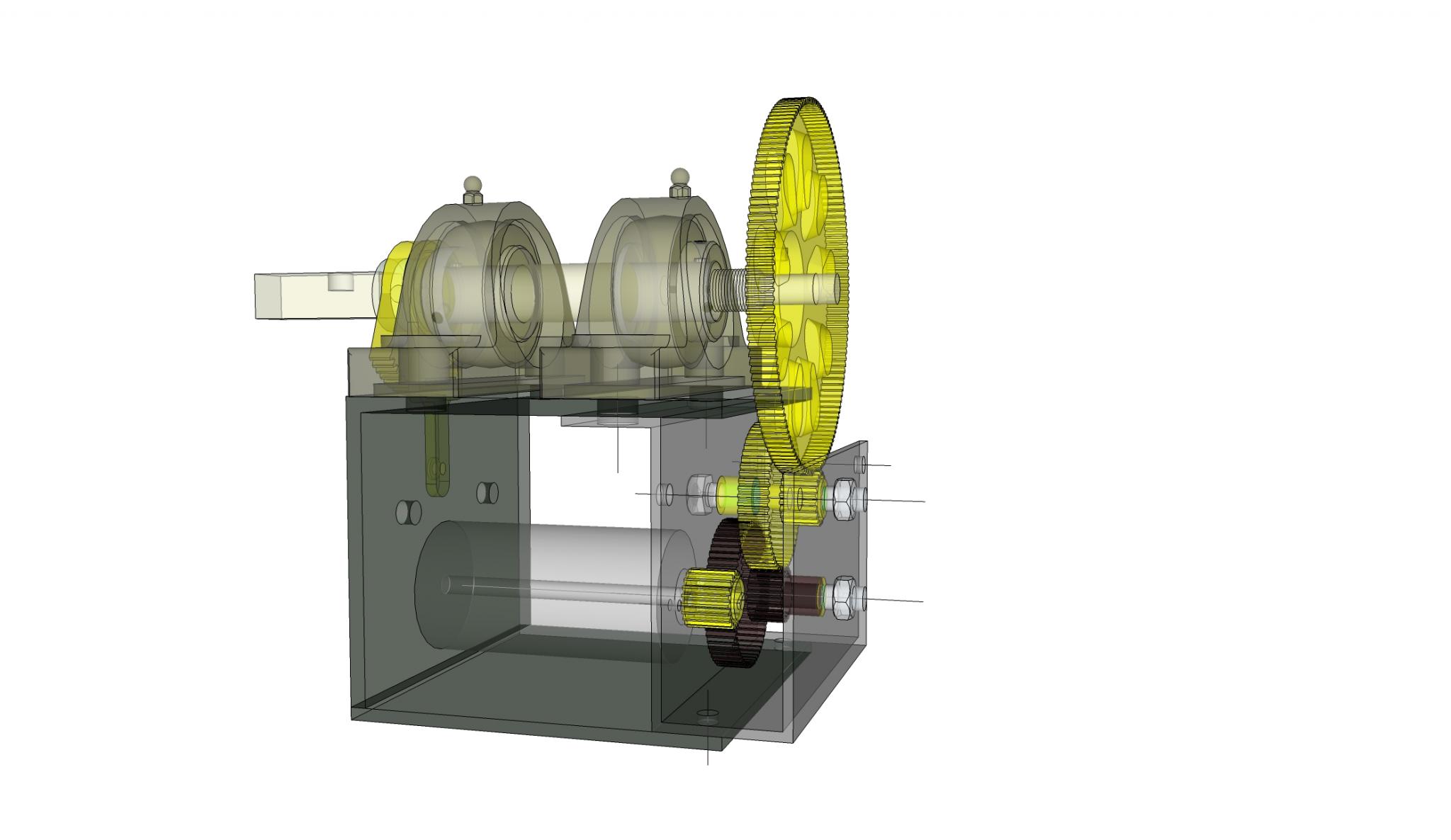
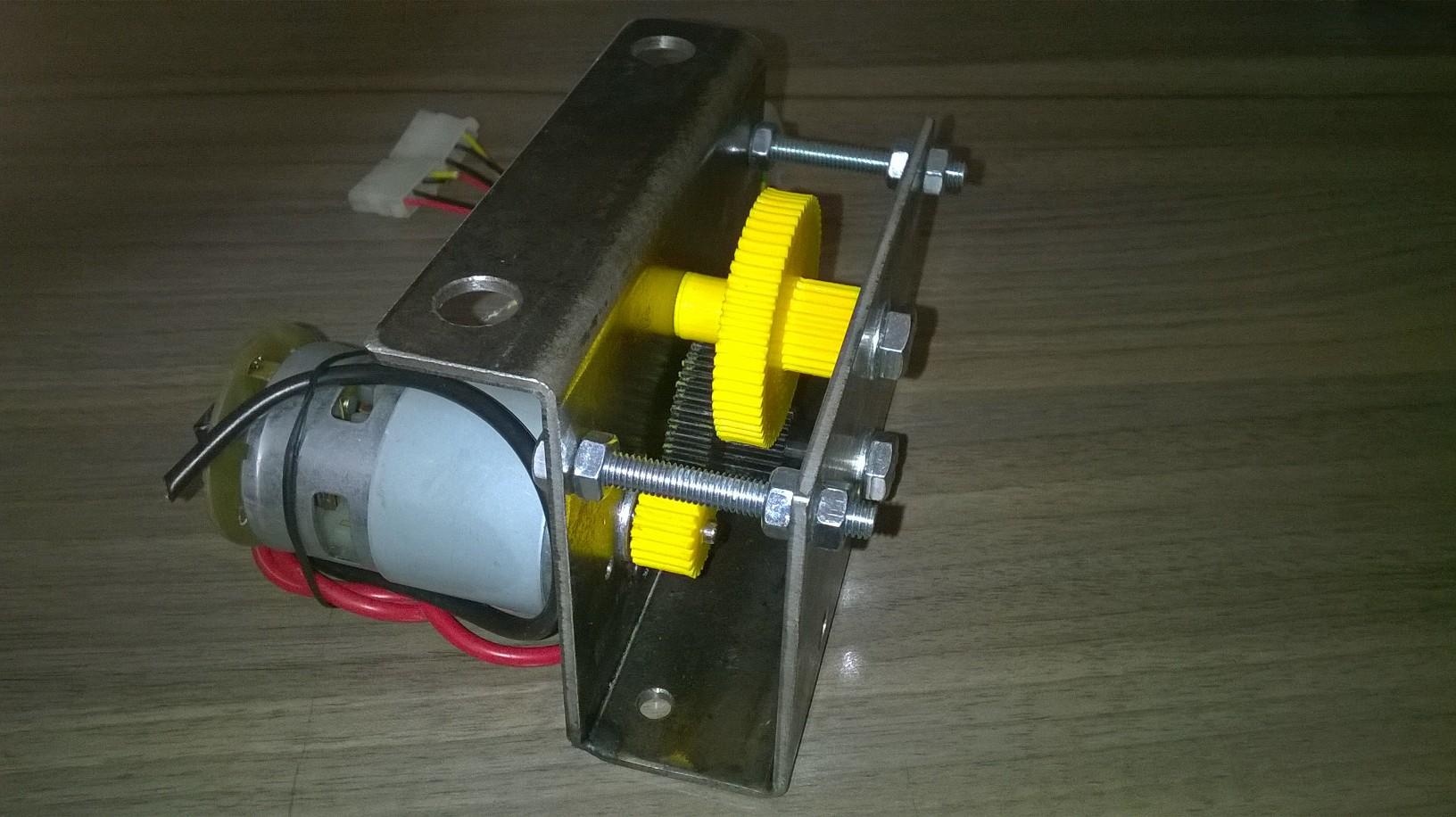
Bonjour à tous, sur chaude recommandation de Mister @jeekje viens ici exposer mon projet et rechercher ce qui me manque auprès de vous. Il ne s'agit pas d'un projet simple du tout. Sinon, c'est pas drôle... Je suis geek depuis mes 10 ans donc depuis plus de 40 ans. Ayant démarré avec un ZX81 et une console Pong que je démontait assez rapidement dans ma prime adolescence, je suis resté scotché... Aujourd'hui, j'ai la chance de vivre d'une de mes passions, l'informatique, et j'en gagne ma vie mais surtout, je nourris mes passions. Assez rapidement, l'adolescence apporte aussi autre chose qu'on m'interdisait bien évidemment : le 2 roues à moteur... Solex, Ciao, DTMX, DTR, XJ, FJ, Tomcat, FZR, GS 80, HVA 430... jusqu'à la Pan à ce jour, je n'ai jamais pu m’arrêter de "rider". Amateur de jeux vidéos (forcément) je me suis vite lassé de ce marché insipide et mercantile pour ne me consacrer qu'à ce qui m'apporte excitation et challenge : les jeux de simulations. Et autant pour ce qui vole, on est très bien équipés, tout existe et se bidouille "à la main", autant pour les voitures, il y a aussi pléthores de volant siglés Ferrari (!), autant pour le 2 roues à moteur y a rien. Enfin non je suis mauvaise langue, il y a eu un outil pour piloter une moto. Et je l'ai acheté. Pour le vomir 2 heures après, pas de potard sur le frein, juste du On/Off, une horreur pour ajuster un freino et faire l'inter du mec de devant... Et puis je vais pas tout raconter mais à ce jour et à mes yeux, il n'y a qu'un seul log de simulation moto : GP Bikes. Moche, simple mais terriblement proche de la réalité. Et pour faire correctement un tour de circuit, faut se demener et on fait des courses mémorables sur ce jeu. En fait de jeu, il s'agit d'une grosse équation qui prends en compte les forces gyroscopiques, centrifuge, centripète, les frottements, la gravité, les jeux de suspensions, la boite... C'est super dur au début mais super gratifiant et pour celui qui a piloté sur circuit, c'est bluffant. J'ai fait quelques vidéos sur ce jeu, en première personne (vue du casque), et je vais mettre aussi le lien vers la première vidéo faite sur la Sapetoku mais je vous prie de m'excuser, cette dernière est en Anglais (le forum de passionnés GP Bikes est dans la langue de Shakespeare). Vous aurez ainsi une vue assez complète. Le premier qui rigole parce que mon Anglais est pourri devra traduire 18 fois la vidéo en Norvégien -------- Petit aparté pour résoudre d'entrée une question que peut-être certains se posent ou vont se poser : Comme chacun ne sait pas, une moto se conduit avec l'angle du guidon jusque vers 30km/h environ puis l'effet gyroscopique prenant le dessus avec la vitesse de rotation, on conduit une moto avec l'effet de contre-braquage, essayez sur un vélo pour les sceptiques de la Fosse, vous verrez bien que pour tourner à gauche, vous appuyez (sans le savoir la plupart du temps) du coté gauche. Et l'angle pris par les pneus fait que vous tourner, c'est le contre-braquage. De toute façon à une certaine vitesse vous ne pouvez pas tourner le guidon sur son axe, la colonne, les roues vous en empêchent parce que l'effet gyroscopique conserve la direction prise. C'est avec ce principe que la SSI, 400km au dessus de nous, fait pour rehausser son altitude et conserver sa vitesse de rotation et donc reste en orbite ! Dans GP Bikes, on peut à loisir, gérer ou pas ces deux valeurs. Sauf que tout n'est pas fini, ni parfait et donc j'ai volontairement choisi (même si c'est une entorse à la simulation pure) d'opter pour la fonction qui des 3 possibles, donne l'angle pris comme un angle de giration jusqu'à que les forces gyro entrent en jeux et donc l'effet contre-braquage. Je n'aurai pas 2 potards distincts mais un seul sur l'axe de rotation qui sera tour à tour celui de rotation et celui de contre-braquage. Le reel est possible MAIS il faut nourrir un soft dédié (à faire) avec des données venant du logiciel GP Bikes, il faut aussi des moteurs très puissants pour libérer ou restreindre les degrés de liberté, c'est génial mais encore plus compliqué. P'tet plus tard... Fin de l'aparté. -------- Le projet : Un joystick avec retour de force (FFB) issu d'un port USB. Le joystick sans FFB est déjà fait et est fonctionnel. L'objet du projet ici est d'y rajouter le FFB. Ce projet s'articule autour de 3 points principaux : 1. la structure avec beaucoup de pièces issu de ma Tornado. 2. la partie mécanique de lecture/renvoi des informations nécessaires 3. le coté électrotechnique nécessaire pour rendre 2 possible. (c'est là que je suis une brêle total) Et c'est dans le 3 que je souhaite ici venir vous questionner. Actuellement, il y lecture des positions de potards (5) et des boutons via une matrice 32 boutons sur un Leo Bodnar BU0386 et sa matrice dédiée. http://www.leobodnar.com/shop/index.php?main_page=product_info&cPath=94&products_id=204 http://www.leobodnar.com/shop/index.php?main_page=product_info&cPath=94&products_id=274 Il y a 5 voies parce que : Frein AV, Frein Ar, Accelo, Embrayage et direction/angle moto. Les boutons, il en faut un certain nombre de base et après c'est du luxe de rajout. Mais certains sont impératifs. Par exemple : Vitesse+ et Vitesse-... limiteur au stand et tout ce qui attrait au changement de carto, d'AW, d'EB.... J'ai réalisé un réducteur de ratio 58:1 en roues d'ABS. Et la structure pour le porter. Et l'adapter au corps fixe de la Sapetoku. En partant d'un moteur costaud en 24V et une alim de 360W (que j'ai déjà) je voudrais y ajouter un Arduino Leonardo en lieu et place du Leo Bodnar pour récupérer ce qui attrait au FFB et le traduire en pilotant le moteur 24V. J'ai aussi un Driver moteur qui je crois, je vais rechercher tout cela, peut prendre 43A !!! J'ai aussi démonté un encodeur rotatif d'une imprimante Brother (ma vieille MFC5490CN, je l'aimas tant.. 2005-2018 sniff) et donc en dehors de l'Arduino je pense que j'ai tout. Pour info, un volant FFB "normal" est sur un ratio 28:1 et sur un p'tit moteur 12V. Sauf que je ne sais pas comment faire pour relier tout cela, réutiliser ma matrice de Léo Bodnar (ce serait bien, ça évite les diodes, etc...et ça permet de tout centrer pour le câblage). J'ai aussi mis une prise RJ45 sur le "pédalier" (vitesses et frein AR) qui remonte au guidon via un câble réseau et se replante dans une autre RJ45 et ensuite direction la matrice pour les vitesses et le Leo Bodnar pour le potard du frein AR. Je pense que si on met le moteur dans la structure, et le bloc alim dédié avec, tout ce qui est alim en 24v sera relié directement. Mais le Léonardo étant collé dans le guidon, il faudra remonter les infos de l'encodeur et du driver moteur. Donc un certain nombre de fils (7 je crois qu'il disait mon copain - 4 pour le moteur - 3 pour l'encodeur) et donc j'ai prévu des RJ45 sur pcb en plus pour faire ça propre. Je vais essayer d'être exhaustif et de ne rien oublier. Déjà dans un premier temps, ce qui m'amène vers l'Arduino Léonardo c'est cette vidéo : exactement ce que je veux mais pour une moto, pas un avion. Il est evident que je vais aussi rendre possible le changement du guidon par un volant, avec un second Leo Bodnar mais là, les limiteurs seront à 270° et non 60° comme sur la moto. Suffira de sortir le guidon et d'y placer un volant, relier les RJ, l'USB et roulmapoul comme dirait @Desmojackque je salutaupassage Video DIY Sterring AVEC FFB Arduino On peut notamment voir dans cette vidéo qu'il existe un log (venant de RFR - RacingFR) qui permet de filtrer tous les effets FFB. C'est exactement de cela dont j'ai besoin pour mon bidule. Pour les intéressés, en Anglais, la vidéo (non publique, merci de respecter cela) que j'ai faite en Avril sur l'avancé du projet, il est évidemment fini dans la partie "normale" et fonctionne fort bien mais sans FFB, dur d'avoir le ressenti de la piste, c'est déjà assez folklo comme ça... Vidéo Artazole sur la Sapetoku GP Bikes (démo gratuite - 263Mo) Suivent quelques clichés de l'avancement et des principes sous Sketchup. Tout l'engrenage est fait en ABS, à 80% d'infill. La boite du Leo Bodnar, les systèmes qui permettent de donner une rotation sur une traction de câble via un engrenage, tout ce qui est dessous est en ABS et est imprimé 3D. Il y a plusieurs évolutions sur ces clichés, par exemple le potard d'angle pris par la moto est passé du bout de l'axe en métal à dessous le guidon, plus les 3 fils à faire courir. Et plus précis aussi. je suis Montois, donc Landais (ben je sais personne n'est parfait ) et donc les couleurs Montoises, c'est Jaune et Noir, j'essaye donc de faire tout en noir et jaune, petit à petit, je vous colle m^me la livrée que j'ai faite faire par un génie du pinceau informatique, la Sapetoku SSP 600 (base Yam). J'en suis très fier !! J'en appelle donc aux @jeek- @Janpolanton et autres spécialistes de la chose que j'ignore pour m'aider à avancer, merci d'avance et aux autres @Desmojack- @rmlc460- @PrBifidus- @Jean-Claude Garnier et autres fondus pour foutre le dawa parce que ça fait du bien et qu'en plus, z'aurez p'tet des idées fumantes-zé-bienvenues mais pas @pascal_lbsinon on pourra pas faire du H.S tranquille... Meuh non, je l'ai pas dit !!! Surtout, bravo à ceux qui ont lu jusque là. Je me débrouille pas mal en pavé !







 2 points
2 points -
"Pas grave si je crame la maison, du moment que l'imprimante fonctionne" mouarf.2 points
-
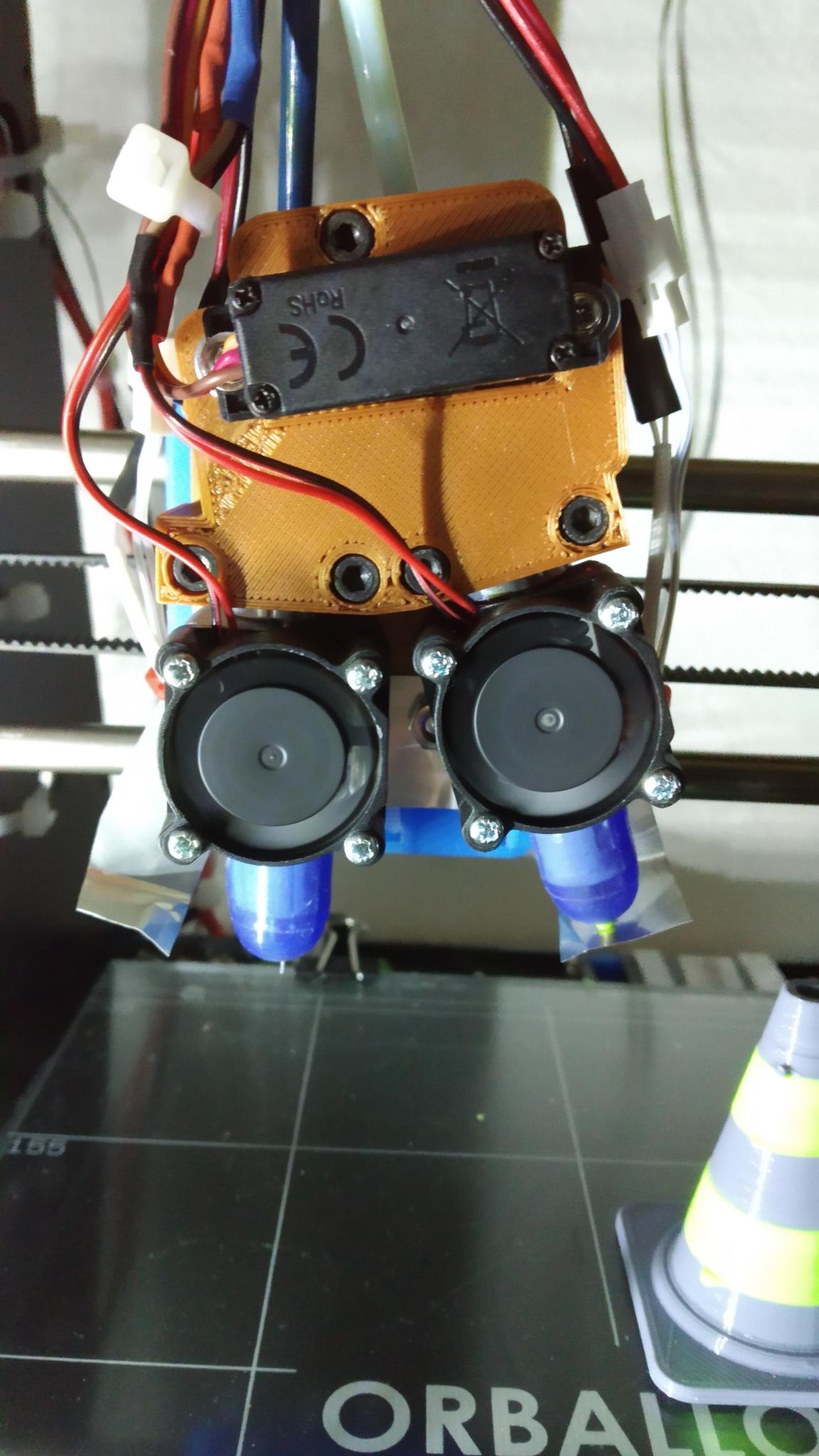
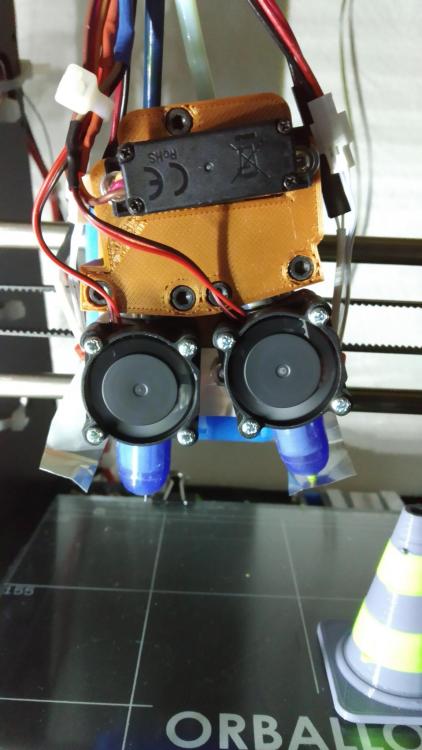
Bon voici le double extruder à bascule et le premier test... Il y a encore des réglages à faire mais je suis satisfait
 2 points
2 points -
Arf, il manque un truc à ton projet... [emoji848][emoji849][emoji17] Rajoutes un bon gros ventilo et un distributeur de moustiques au dessus de ton écran histoire d'avoir les cheveux au vent et des moustiques collés sur les dents, ça fera encore plus vrai. [emoji23][emoji23] Plus sérieusement, super projet. [emoji106] Ça me rappelle mon adolescence lointaine pendant laquelle j'avais fabriqué un volant en bois, avec un petit levier pour passer les rapports comme sur un boîte séquentielle, mais aussi un pédalier. Tout ça était géré par l'électronique de vieux joysticks. Ça me permettait de jouer à Formula one sur mon pc. Plus tard je l'avais adapté à ma PlayStation première du nom, console que j'ai toujours et qui est fonctionnelle, comme mon authentique Nintendo NES, que je ressort de temps en temps pour rejouer à Mario. [emoji16] Envoyé de mon ONEPLUS A6003 en utilisant Tapatalk2 points
-
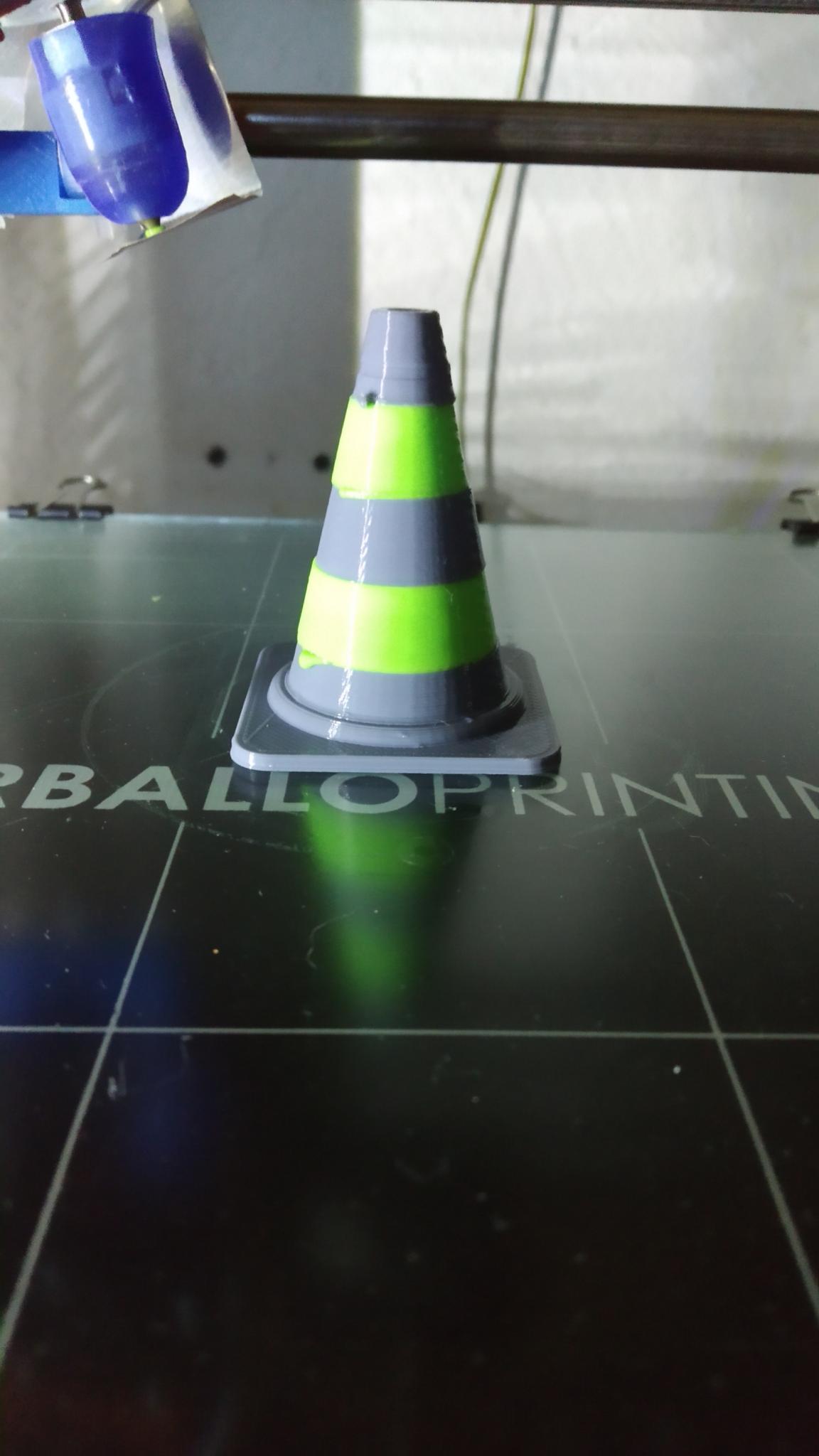
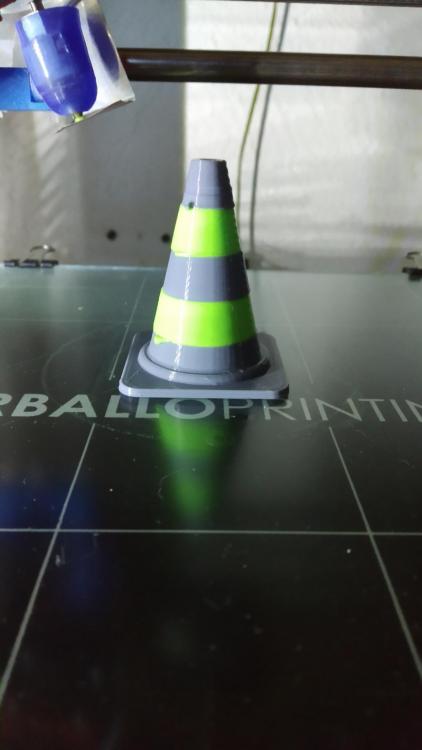
C'était pas le but, et le tuyau viens de @rmlc460 Mais clairement, depuis que je l'ai, les impressions sont vraiment, mais vraiment très bonnes. Ca m'a surtout corrigé mon défaut de dérive des impressions vers la droite (écrasements, rugosités des surfaces, irrégularités diverses etc...). Oui par exemple ici Micro-défauts dus aux supports, mais c'est vraiment nickel. Alors bien sur, tout n'est pas grâce à ce nouvel axe ^^ Derrière il y a des heures de réglages et ajustements divers comme beaucoup de monde sur ce forum. Sinon à part comme ce lien, non nouvelle pause dans les impressions. Entre la ventilation, le firmware alternatif, les décos de Noël, et surtout le taff... Dur à suivre.1 point
-
Exact! Mais le français est une langue formidable et j'avais employé le conditionnel à cette époque car je n'avais pas vraiment épluché le fonctionnement de ces capteurs1 point
-
Oui absolument.1 point
-
Merci a vous j'ai contacter gearbest j'attend leur reponse on va bien voir.1 point
-
fait attention @Yo' c'est un squatteur1 point
-
effectivement tu les collectionnes si tu veux je mettrais demain mes STL ici normalement ils sont bons pour les E3D originales1 point
-
C'est zoli ! question, le petit module au dessus des portes, c'est la minuterie pour la cuisson des "pizza". . . . oki, je sort loin1 point
-
Vivement que je reçoive ma Ramps 1.4 et mon Arduino Mega 2560 pour tester tout ça (mais quand vous aurez sorti le guide "Dual rocking hotend for dummies" )1 point
-
oui pas de problème, j'ai pas épluché le gcode mais ça a bien fonctionné, j'ai fait d'autres essais depuis pour affiner les réglages, il y a encore du boulot mais c'est prometteur, j'ai même trouvé un moyen pour me passer du/des ventilos de pièce en utilisant le flux d'air des 2 ventilos des hotends, j'en dirais plus un peu plus tard...1 point
-
Pour maintenir fermement une prise mâle dans une prise femelle ou l'inverse. Comme ces prises ne sont pas domestiquées donc sauvages alors elles s'agitent beaucoup afin de se libérer et ça casse forcément .1 point
-
On a tous répondu en même temps1 point
-
@Maeke a raison. D'ailleurs, je n'ai jamais préconisé ce montage à pont diviseur. La solution, le passage par opto coupleur.1 point
-
@Maeke On a les mêmes recherches. D'où l'intérêt de passer par un circuit et un optocoupleur. https://fr.aliexpress.com/item/1-Channel-Optocoupler-Isolation-Module-Input-12V-No-Din-Rail-Holder-PLC-Processors-80KHz-PC817-EL817/32719957788.html1 point
-
D'ailleurs, @Jean-Claude Garnier, la boîte Ellip6 fait aussi dans le simulateur de motot : http://www.e6lab.com/docs/E6LAB_MoTo_FR.pdf1 point
-
Ça rigole pas du côté de chez @CacaoTor1 point
-
Petite news du jour. Mes échanges avec nos amis qui parlent Mandarin. Le gars a carrément demandé au chef de produit de communiquer les liaisons physiques qui nous intéresse. Ce dernier a répondu positivement mais est actuellement en voyage d'affaire. Il faut attendre sont retour, en espérant que l'engagement soit tenu.1 point
-
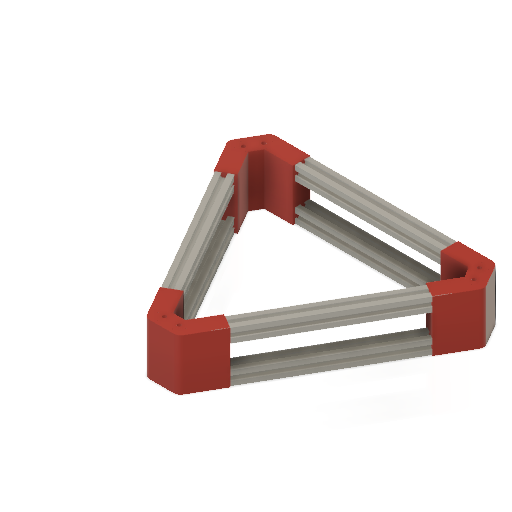
Bon dia: Voici une deuxième approximation, les trous des coins ne serviraient pas à la fixation (je n'ai pas encore décidé comment faire ça), je les ai conservés avec l'idée d'y insérer peut être des tétons pour positionner la cage avec les empreintes des vis de fixation des Makerslides:
 1 point
1 point -
Bravo... J'ai aussi tenté l'aventure de la sculpture (sur une fée clochette, curieuse coincidence!) mais sans grand resultat (je n'y ai clairement pas investi suffisament de temps). J'étais parti sur blender vu le nombre incroyable de tuto en ligne... Peut etre le choix de logiciel n'était pas le bon, j'ai trouvé ca incroyablement dur et incapable de reproduire les tuto les plus simples... En tout cas bravo pour ce que tu as déjà réalisé et bon courage pour la fée clochette! Je suis déjà impatient de voir le résultat!1 point
-
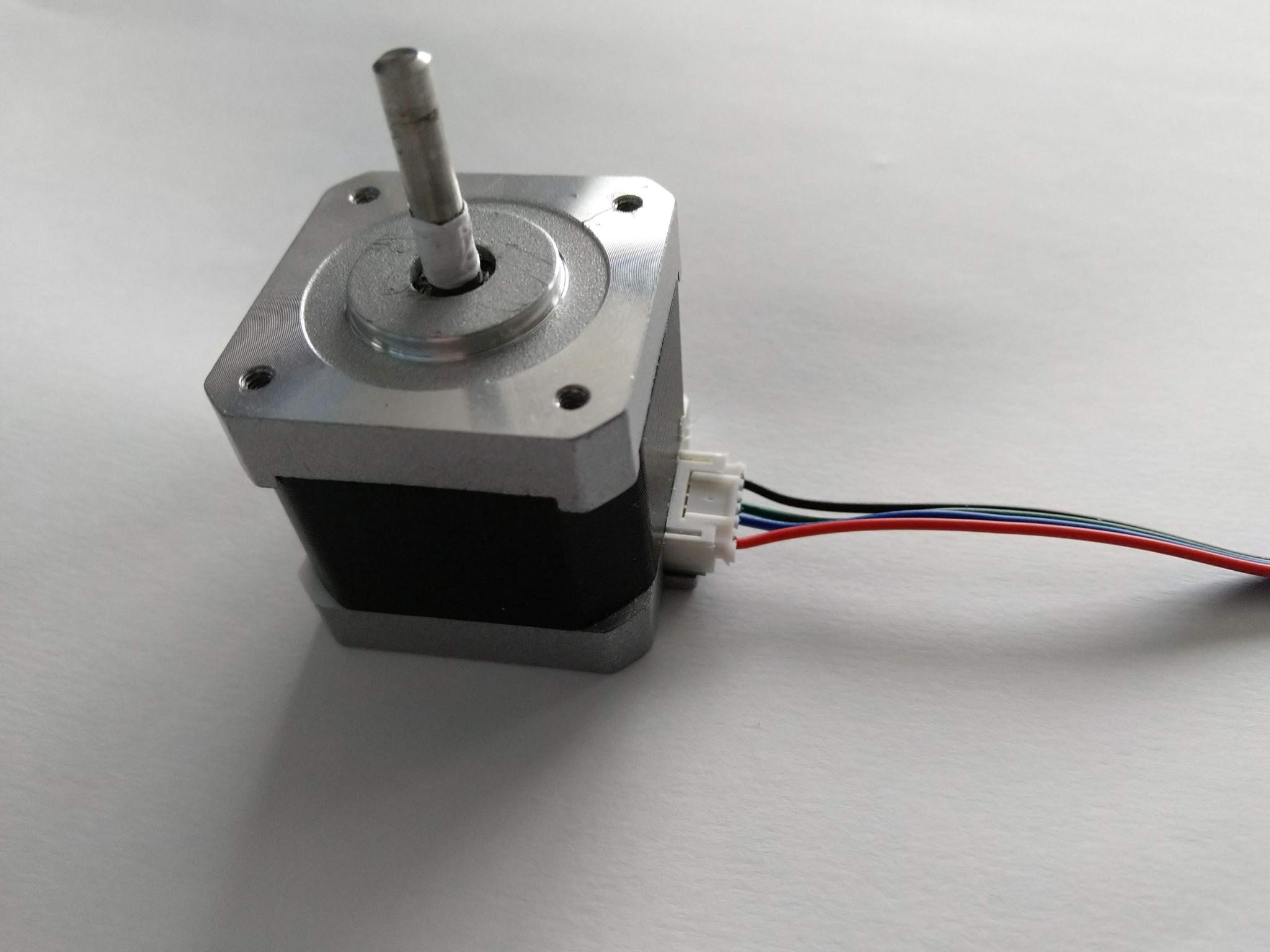
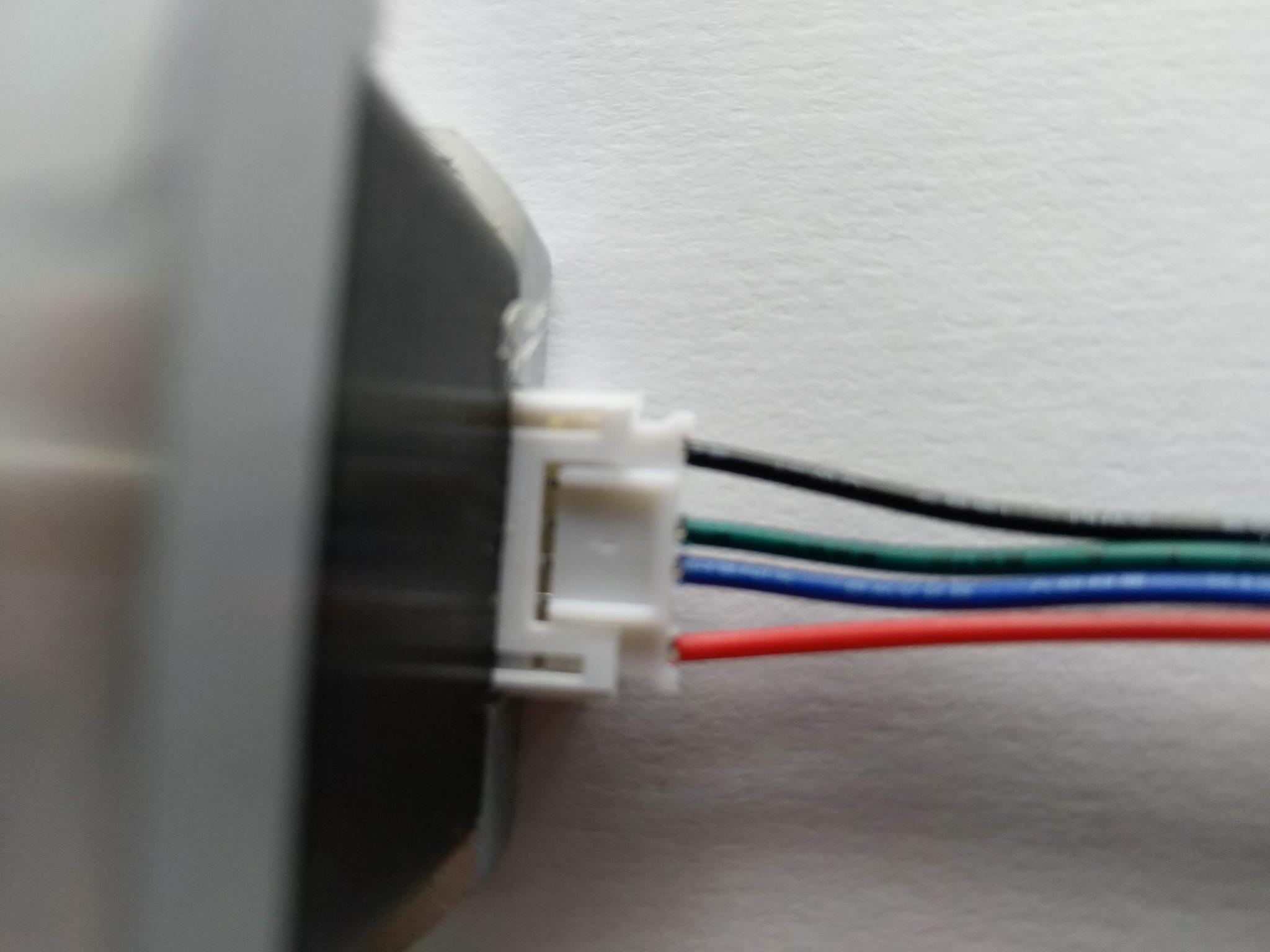
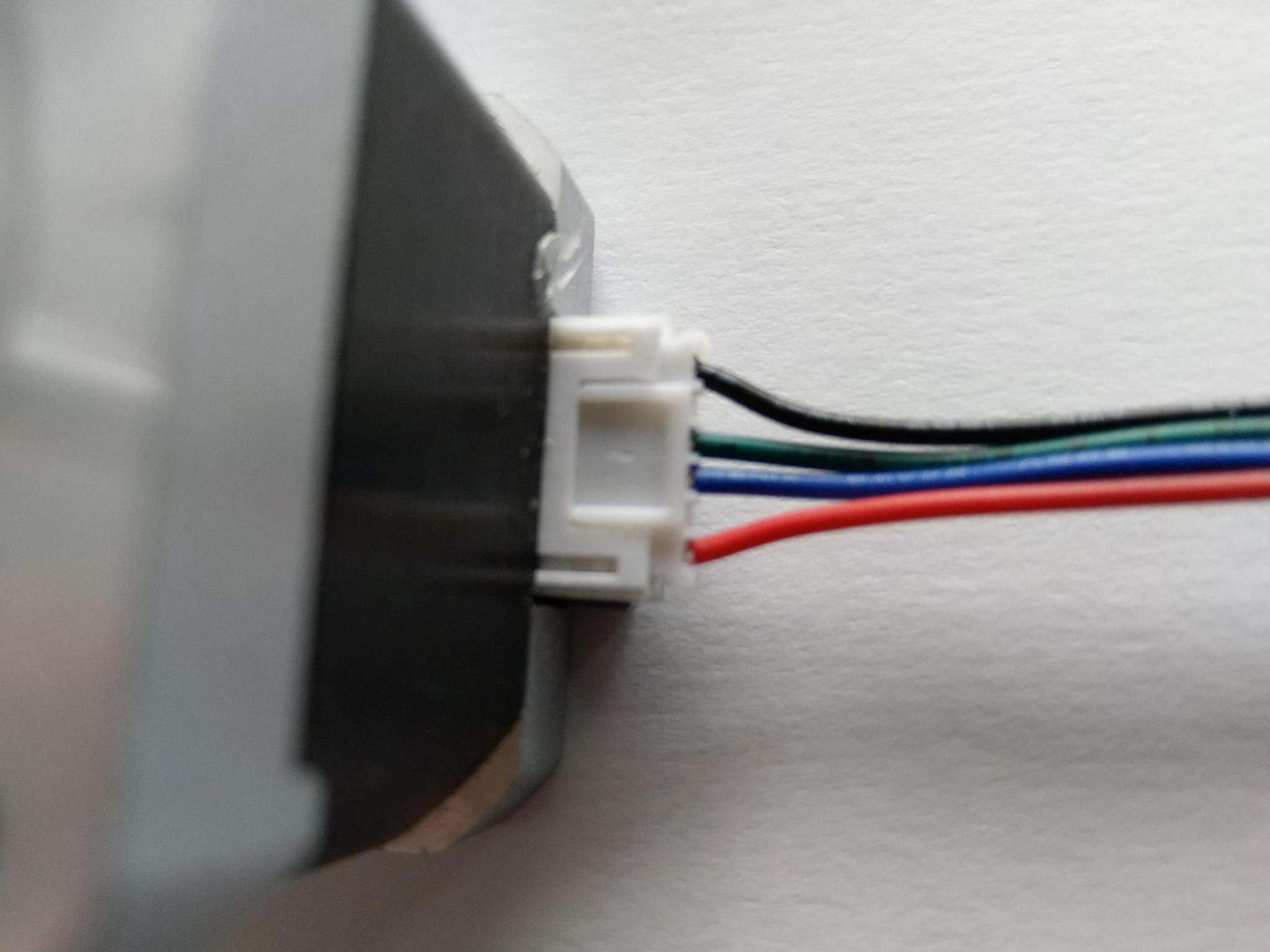
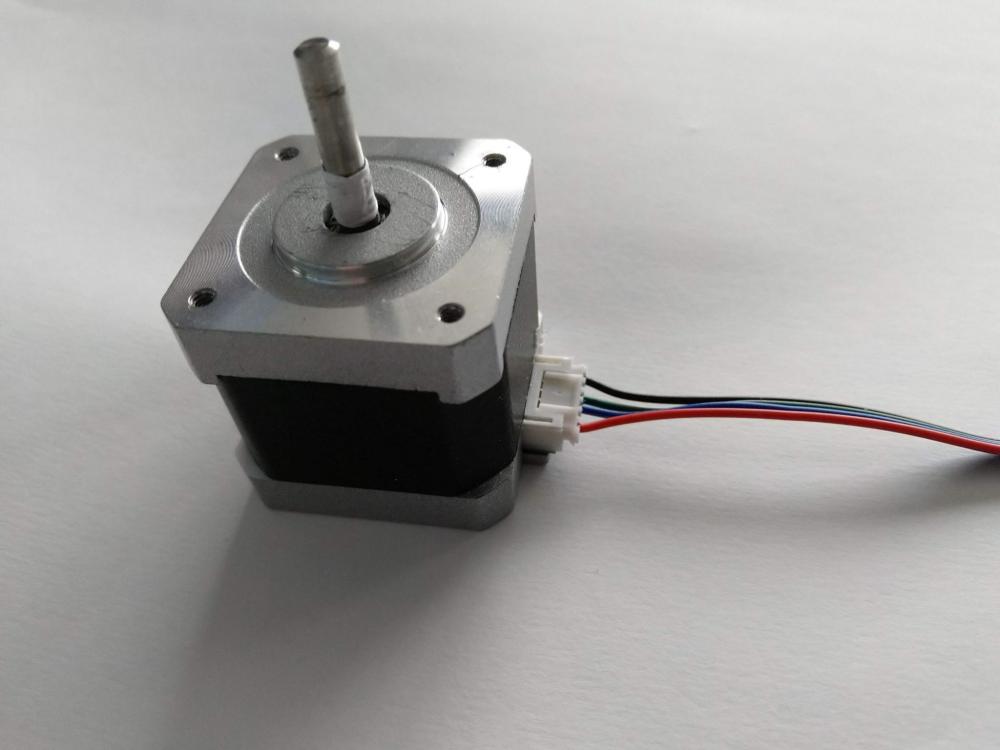
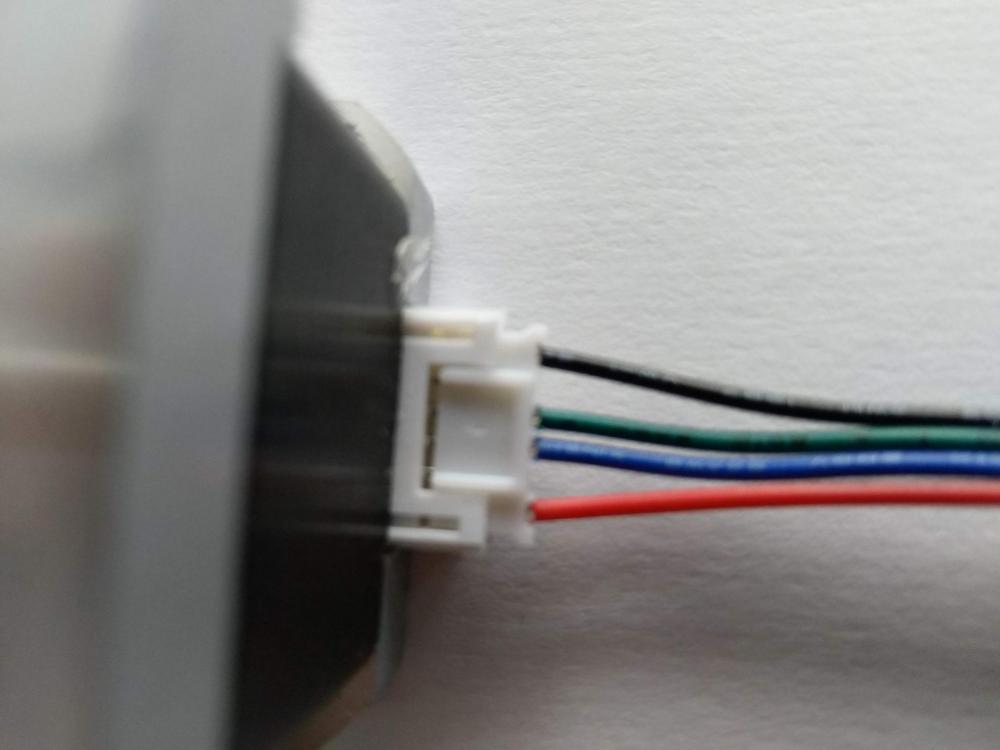
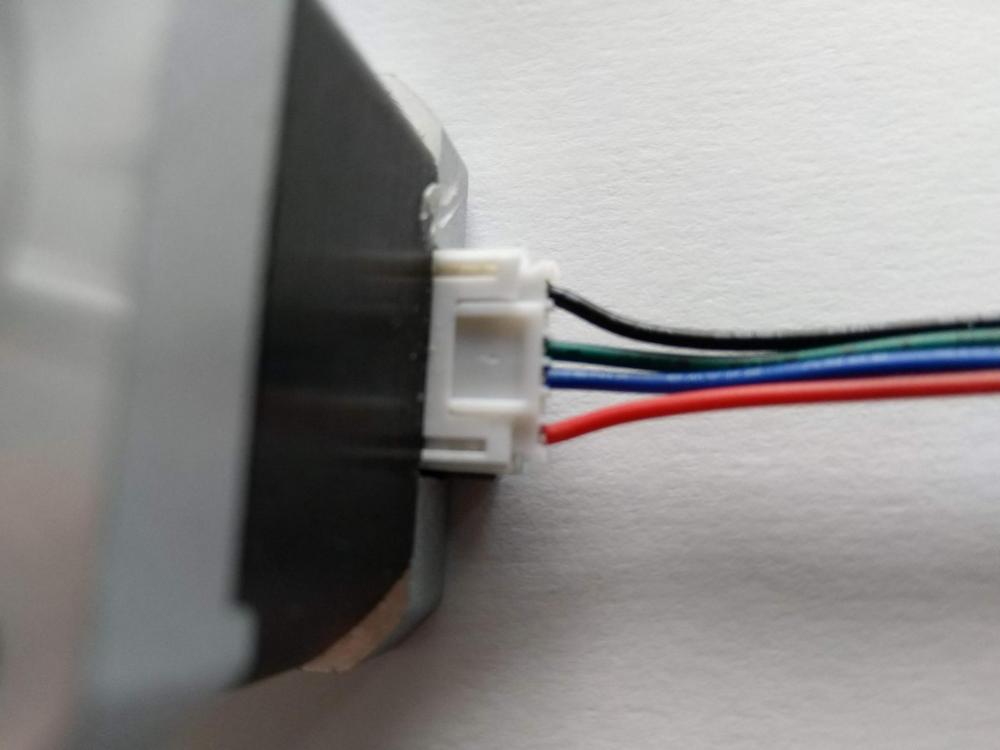
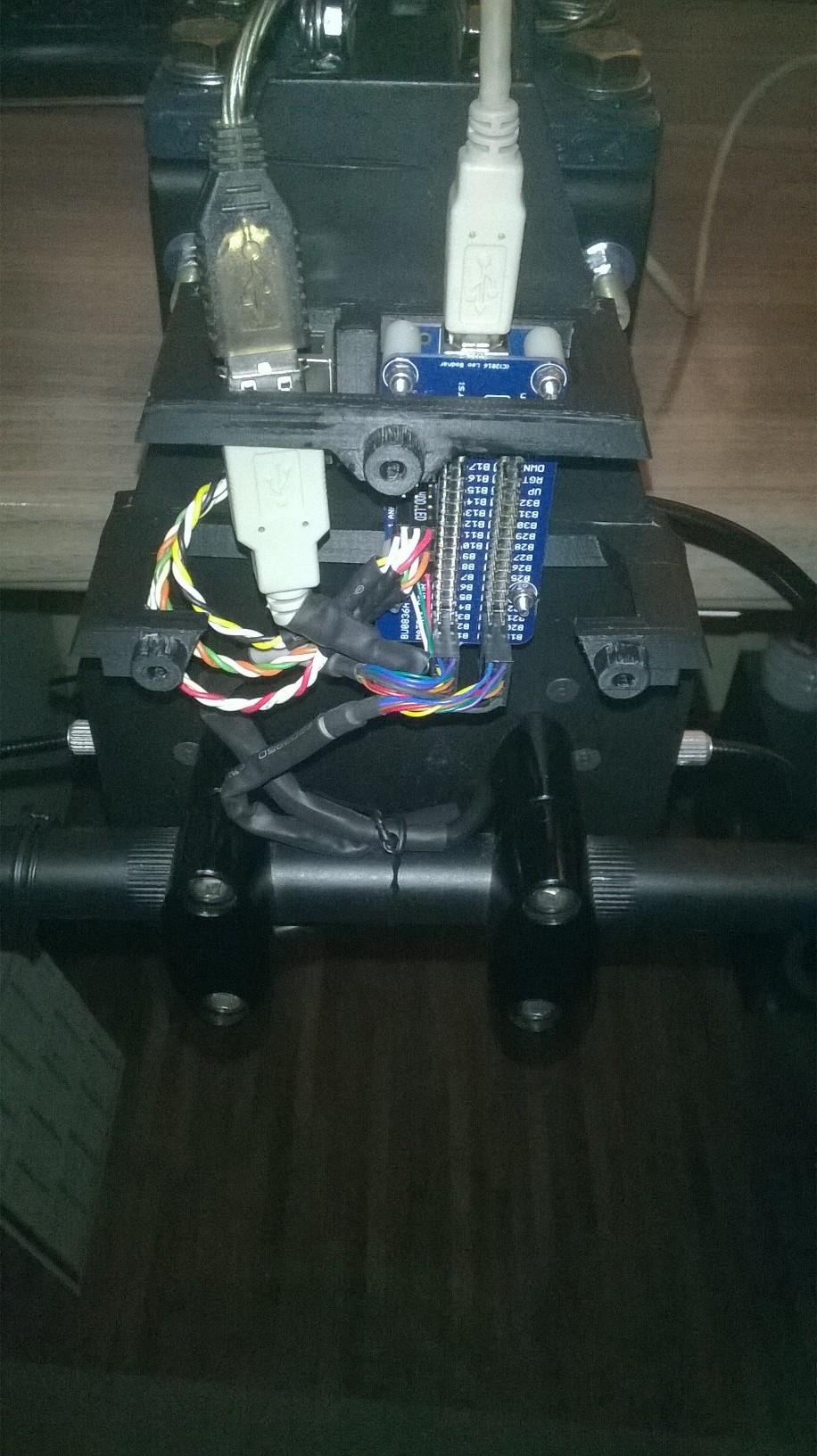
Parfois... on peut penser après vérification/contrôle que les câbles et branchements sont corrects et c'est pas forcément vrai... Il y a encore peu de temps, j'avais un problème : la tête partait par intermitence vers la droite et refusait de faire l'auto-home par intermitence, sur le moteur X, et au lieu de revenir en position "home", la tête se décallait de 1cm vers la droite toujours par intermitence. Et pour mieux t'expliquer, rien ne vaut des photos (attention c'est un exemple, j'ai changé mes moteurs depuis, ici présent c'est un ancien moteur) : Selon toi... le moteur ici présent est-il bien branché ou non ? N'importe qui sans regarder de près... dirait "OUI". Mais pourtant c'est pas le cas. Si on regarde plus près : Il y a un petit jour... un petit espace... ce qui "Chez moi" provoquait que le "Auto Home" ne se fesait plus par intermitence... quand les moteurs étaient alimentés... toujours par intermitence, cela fesait un petit "faux contact", ce qui provoquait mon problème. Et le simple fait de faire ceci : J'ai juste pousser la fiche de 1/2 millimètres... et automatiquement cela a résolu mon problème. J'ai passez des heures entières à chercher ce qui pouvait causer le problème... et je suis passer sûrement plus de 10 fois à côté. Cela étant dit... vu que la petite fiche, j'avais fini par la collé, car la fiche bougeait... malgré la colle, la fiche continuait occasionnellement à bouger... après quelques prints jeté à la poubelle jeter à cause de ce petit "soucis", j'ai profité de mon envie de mettre des moteurs "plus silencieux", pour changer ceux des axes X, Y et E...ce qui élimine le soucis pour plus longtemps. C'est pour cela que je t'ai conseillé de regarder les banchements... car ton problème ressemble sensiblement à ce que j'ai moi même vécu. Alors... l'impression 3D n'est pas une science exacte... et peut être que ton problème à une autre origine. Bon courage...
 1 point
1 point -
C'est un shield, ça se monte sur arduino Uno ou Mega. Les librairies sont disponible, c'est du standard. Aucun problème c'est du standard Arduino, on trouve énormément d'exemple d'utilisation sur le WEB. Ce lecteur fonctionne en UART, c'est a dire via port série. Là encore, rien de compliqué pour l'interfacer. Reste a trouver des exemples d'utilisations.1 point
-
Bonjour, Tu peux utiliser des ESP32 ou 8266 associés à un lecteur rfid Wiegand pour la partie lecteur de badges. Ça se programme très facilement sous plateformio ou l'ide Arduino, et il existe des biblio pour gérer ce type de capteur. Tu peux aussi utiliser le firmware Espeasy qui permet de paramétrer les Esp au travers d'une interface Web bien foutue. Les Esp sont beaucoup plus puissants que les Arduino et peuvent embarquer sans soucis un site Web, comme Espeasy par exemple. Pour le site Web, tu pourrais aussi utiliser un Orange pi, certains embarquent de l'emmc et n'ont donc pas besoin de carte SD. Autres avantages, ils supportent le WiFi et le Bluetooth nativement. Ils peuvent fonctionner en access point, ce qui pourrait te permettre d'avoir un réseau propre à ton projet si tu partais sur une solution esp. Pour finir, un lien qui pourrait t'intéresser, solution que je viens d'évoquer mise en œuvre avec la solution domotique Jeedom. url=https://www.jeedom.com/forum/viewtopic.php?f=185&t=30574&share_tid=30574&share_fid=152529&share_type=t Envoyé de mon ONEPLUS A6003 en utilisant Tapatalk1 point
-
Modèle d'Anet : A8 Type & modèle de l'extrudeur : Stock Filament : Wood De chez : Sunlu Filament : Rouge De chez : Echantillon Tianse Filament : Orange De chez : filimprimante3D Filament : Noir De chez : Sunlu Filament : Blanc De chez : Tianse Température d'impression : 200° Lit : 60° Surface d'impression : Verre + laque Support : aucun Slicer : Simplify3D https://www.thingiverse.com/thing:2694157
 1 point
1 point -
Normalement oui. Je n'ai jamais eu l'occasion d'essayer mais d'après ce que j'ai vu à droite ou à gauche sur internet, ça devrait fonctionner sans problème. Après je pense qu'il faut quand même prendre quelques précaution. Par exemple utilises un boitier aéré et ajoutes des radiateurs au Raspberry (si possible, évites de mettre un ventilateur qui est bruyant et pas forcement indispensable). Sauvegardes les programmes de l'Arduino (sketch) et la carte microSD du Raspberry. Mais vu le coût des éléments tu peux prévoir des pièces d'avance dans 1 ou 2 ans pour te dépanner rapidement (surtout la carte microSD).1 point
-
Je viens de recevoir le BL-touche avec sa pointe en plastique, une documentation fournie et un gros coup de gueule cotre les imitations https://www.antclabs.com/1 point
-
Merci Mike !!! Le slicer a l air d aller bcp mieux dans une version de 2016 .... Vache... c fou que certains modele passent bien et pas les autres.. Et tt k, g encore qq peaufinage au niveau reglage a faire et ca sera bientot nickel !! Merci encore..1 point
-
comme ça c'est bon ?1 point
-
Quand même un effort quoi !!!! Vous savez faire une recherche sur google mais pas sur un forum !!! Merde quoi. Comment veux tu que l'on t'aide si tu ne fait pas un petit effort ... https://www.lesimprimantes3d.fr/forum/68-tutoriels/1 point
-
Le sujet étant "les pièces de rechange [...]" je pense que cette info a sa place ici : https://iformer.fr.aliexpress.com/store/all-wholesale-products/4516051.html Il semble s'agir des pièces d'origines1 point
-
Moi, j'utilise >>>celles-ci<<< en 0.4, et j'en suis très content, ça reste propre, ça ne coute rien, et rien n'accroche dessus! Bon, après, faut pas être pressé, mais en même temps, je dois toujours en être à ma première, et toujours avec une qualité identique...1 point
-
ok, merci a tous pour vos réponses!! je vais donc explorer la piste de passer par un octocoupleur... Je laisse le sujet en suspens pour l'instant et je reviens dès que j'ai effectué la modif pour vous en informer (je pense courant semaine prochaine, le temps d'acheter le matos et de le monter...) QQU'un pourrait me dire si ce type d'octocoupleur sera bon pour mon capteur?? Bonne continuation à tous!
 0 points
0 points




.png.295cd4d3c6df2525abd04dd6de79b6a4.png)









.thumb.jpeg.9a4019c4378b9b868774b9f3b684a811.jpeg)