Classement




Contenu populaire
Contenu avec la plus haute réputation dans 14/03/2019 Dans tous les contenus
-
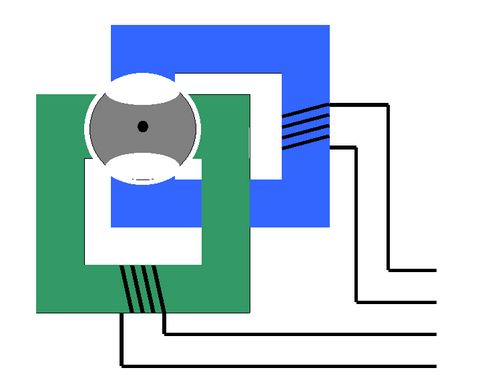
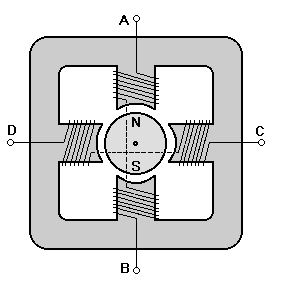
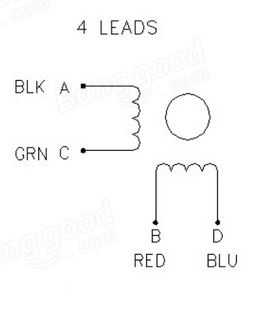
Au fil des topics, sur le tchat en MP ... on lit souvent des questionnements autour des moteurs Pas à Pas (nommé "vulgairement" NEMA) Les questions qui torturent, déroutent et bloquent parfois le makers en folie et impatient , que nous sommes tous au fond de nous "c'est quoi toutes ces couleurs" ... "pourquoi il tourne dans le mauvais sens" ... "il frétille... grogne... chauffe" ..."on peut le faire tourner avec une pile "...... "marche po"... Je vais tenter (avec ceux qui vont à ne pas douter en apportant leur pierre) de partir de généralités pour essayer de se rapprocher de nos problématiques ... non pas quotidiennes mais qui énervent, parfois. Le but étant de parler "l'humain" et de se comprendre... dans pas de théorie sur l'électromagnétisme ...théorèmes grecs et évitons les anglicismes et acronymes abscons (il y a suffisamment de mots avec leurs combinaisons dans la langue française pour définir à peu prés tout, quel que soit le sujet y compris technique ^^ (à part dans le titre ... mais je l'ai fait exprès )). Je mettrais des liens vers des informations plus précises pour ceux qui le souhaite (ce ne sont peut être pas les meilleurs... les liens ^^). L'on peut imaginer des tutos plus spécifiques, précis ou ... autres...pour l'instant je (on ) vais faire ce Doc en 3 parties Le Moteur ... généralités.. caractéristiques.. identification des cables Le stepper et le réglages Récapitulatif des problémes ou questions qui ne seront pas évoquées dans les 2 précédents Il serait pas mal de faire un truc simple en fait (sans trop de technique) Je n’évoquerais pas de notion de modification de firmware ou autre manips logiciels (très à la mode en ce moment) nous resterons donc dans le monde réel ou une bonne partie des soucis liés aux déplacement peut être résolut ou au moins vérifiés avant d'aller plus loin Ne pas hésiter à me reprendre si je dis parfois (souvent) des bêtises (énormes) C'est parti Généralités Différents types de moteurs à "courant continu" (non exhaustif) Les moteurs à balais exemple : moteurs d'essuies glace de voiture ...les jouets ... Les moteurs brushless exemple : ventilateur type micro nformatique ... modelisme.. Les moteurs Pas à Pas exemple : je vous laisse chercher Il existent d'autres types de moteur à Courant Continu et surtout differentes façons de les gérer Principaux principes pour les moteurs Pas à Pas le moteur à réluctance variable le moteur à aimants permanents le moteur hybride ( "un peu" des 2 du dessus) C'est cette dernière technologie que l'on utilise pour nos machines en général Différents types de moteurs Pas à Pas Pareil il en existe ... plusieurs types Les unipolaire Les Bipolaires Nous prendrons les 2éme ... parce que ..... c'est ceux là qui nous intéressent. On entre dans le vif du sujet Combien de câbles Et bien ... comment dire ... un certain nombre pourrais être une réponse... mais pas satisfaisante je pense. Tout dépend essentiellement des principes de fonctionnement et technologies citées ci dessus. Dans le cas qui nous intéresse il en auront minimum 4 et maximum 4 .. donc 4 est pas mal Pourquoi 4, car dans ce que nous avons retenu le Moteur à courant continu puis Pas à Pas puis Hybride puis Bipolaire .... qui utilise 2 (séries de ) bobines indépendantes qui ont chacune 2 extrémités connectées (et 2x2 =4 ) En fait il y à des dizaines de bobines en séries pour chaque élément de la paire de bobines (mais on a dit que l'on faisait simple) schématiquement (et toujours dans notre cas de figure) cela donnerait ... OU OU Etc ..... au niveau de représentation c'est identique ... c'est uniquement pour la compréhension D'aucun me diront .... "oui mais ..euh. l'on peut utiliser un 6 câbles en 4 câbles..." ...je répondrai " l'on sait ... mais ce n'est pas le sujet ..." Très bon article de blog en français sur le fonctionnement de moteur pas à pas C'est quoi toutes ces belles couleurs de câble En fait cela est normalisé (je ne retrouve plus la note) ... mais dans la vrai vie ... c'est un b0rd€l d'arc en ciel innommable .. quand il y a des couleurs ... connues Je mettrai un lien ... mais l'on verra plus loin que l'on peut (doit) faire abstraction des couleurs (surtout pour certaines pathologies de la vision ) perso je ne m'y fis jamais Que veut dire, par exemple, "NEMA 17" Arf .... Je sais ........c'est ça... ... oui ... mais pas que ..une ville de Mauritanie ... peut être .. NAN ! (enfin oui ...mais pas là) NEMA : National Electrical Manufacturers Association ... paf ! voila ...un organisme de normes étasuniennes (on s'en fout...je sais ça sert à rien ...la bécane ne tourne toujours pas ). vraiment pour les passionnés Le 17 lui est plus interessant ... c'est quoi ? plus puissant qu'un NEMA 14 et moins qu'un NEMA 23 ? ...Que nenni... peau de balle .... Il s'agit d'un rapport de grandeur, mais c'est tout bêtement lié à la taille physique (et encore un partie seulement) du moteur. Exprimé en dixièmes de pouces ... 1 pouce = 25.4 mm... 1/10 pouce = 2.54 mm...... 17x 2.54 = 43.18 mm et ça pour les cotes d'encombrement de la face avant uniquement(ce que dit leur norme) ..c'est du lourd . Ne me demandez jamais pourquoi aucun NEMA17 ne fait pas cette cote mais 42.3mm je ne sais pas !! et ... ça m’intéresse pas plus que ça , si j'ai besoin au pire, je prends un pieds à coulisse ou un réglet, La longueur ...profondeur... va de, environ, 30mm à 60mm mais n'est pas liée à l'appellation ni à la norme sus dite Donc strictement aucun rapport avec des caractéristiques électriques ..de couple ..de puissance ....etc (un mythe s’écroule encore pour certains) . Vers le forum bien connu (en anglais) quelques explications et et tableaux Et les caractéristiques du moteur, alors Si l'on doit l'acheter ou bien qu'on l'ai dans les mains (de recup' ou pas ).il faut se baser sur le DataSheet ....oups désolé pour le gros mot...donc, fiche technique du constructeur du moteur avec sa référence (sans référence ce ne sera pas abordé ici) Et des références il y en a des tartines en circulation. Parfois une partie des caractéristiques est sur l’étiquette .. pas toujours....42HT47, 42SHD0404-22, 42BYGH4803, LDO-42STH47-1684A, 17HS1011-20B...etc .. etc ..; des dizaines voir des centaines comme cela. Pas d'autre solution que d'appeler le fournisseur .. ....ou plus simple chercher la fiche technique/datasheet avec notre pote Google.. Prenons un exemple concret On ne constate .... pas grand chose comme information claire ... hormis le constructeur (et encore si c'est bien lui), une série de référence et 1,8°.step ... c'est deja ca .. d'autre infos des fois .. moins aussi ... ça fait pas bezef (si si ça existe ... on peut le mettre au scrabble ) Donc si l'on cherche sur le net l'on trouve ce genre d'informations On googlise "MT-1704HS168A" et on farfouille Caractéristiques generales par exemple : (il y en a même de trop en fait pour notre besoin) Norme du moteur pas à pas: NEMA 17 çà on le sait ça tombe bien c'est ce qu'on veut et on connait maintenant ^^ Dimensions: 42.3x42.3x48mm là rien de neuf Poids: 350g c'est lourd ... ca doit ete bien (bof) Diamètre de l'axe: Ø5 x ~24 mm cette information en cas d'achat est importante ... c'est le diamètre de l'axe Ø5 et sa longueur accessible ~24 mm (le sigle ~ est pour "environ") Nombre de phase: 2 Les 2 séries de bobines évoquées plus haut dans ce texte Voltage standard: 2,8 V le stepper se débrouillera tout seul ... sans intérêt aujourd'hui...de toute facon nous pouvons pas agir directement sur cette valeur (un peu long a expliquer) Nombre de pas: 200 Intéressant ça ..pour un tour complet , bien sûr.... mais se sont les plus courant en principe pour nos bécanes... en cas de recup' attention il existent d'autres sectorisation 0.9°=400 pas ....7.2° = 50 pas ...etc Pas angulaire: 1,8° (+/-5%) C'est bon ils savent... compter 360° divisé par 200 pas ... ca fait bien 1.8° de deplacement minimum en pas plein Couple de maintien: 50N.cm soit 70oz.in on en parle pas ici .. mais pour info entre 40 et 60 N/cm c'est correcte (pour moi) cela signifie que à 1 cm perpendiculaire a l'axe il peut resister àune force de 50 Newton (attention on trouve aussi des Kg/m) Connection: 4 fils molex ou dupont Nickel ... dans ce cas il y a une connectique ..ce n'est pas toujours le cas .. avec de connecteurs de type Molex ou Dupont ... cela peut etre important selon votre carte contrôleur si vous n'avez pas le matos ou les compétence pour les changer / adapter ... sinon ... on se dem*** de (peut etre un autre sujet interessant si quelqu'un veut si coller ^^) Résistance/phase: 1,65 Ohm par phase C'est bien .. mais pas important pour nous aujourd'hui (et plus tard même) Inductance/phase: 2,8 mH par phase Pareil que ci dessus Courant/phase: 1,68 A par phase Ça c'est capital de le savoir .... sinon ... on est mal pour régler l'intensité (régulée...!) à fournir au bestiau ... c'est le stepper/pilote qui va sans charger .. mais il faut le régler à partir de cette information INDISPENSABLE Certaines de ces infos sont importantes pour les notions des différents couples . vitesse ..etc ... , mais nous prenons pas la tête pour nos machines ..... conversion couple de maintien Pour en savoir beaucoup plus Travaux pratiques Maintenant que l'on a le biniou dans la main avec les 4 fils qui pendouillent .... on fait quoi ? Identification des câbles qui vont avec chaque Bobine/Phase 3 cas les plus courants vous "voyez" : RIEN ! 4 câbles NOIRs (ou d'une autre couleur mais identiques ou sans connecteurs...si si ça arrive dans la recup') YES ! de belles couleurs bien differentes ... mais s'en fout !!! (moi en tout cas ) pour identifier et surtout vérifier les câbles qui vont bien, 2 solutions simples : avant toute chose prenez un bout de papier adhésif .. un marqueur .... et identifié 1 câble au hasard et appelez le A (pourquoi A ... parce que ..euh .. c'est la 1ere lettre de l'alphabet.. par exemple) Dénuder les câbles si nécessaire OU ...OU... A la mano..... tout simple... Et le plus simple si vous pouvez faire tourner l'axe du moteur aisément .... ce qui n'est pas toujours le cas si celui ci est monté ou en contrainte avec courroie ou engrenage ou encore inaccessible (sous le plateau d'une delta par exemple ) Tout d'abord tourner l'axe du moteur à la main pour "ressentir la faible résistance en rotation entre les doigts (non branché... pas avec sa courroie... ou engrennage ... !!) Ensuite Shunté CE câble avec un des 3 câbles ou contacts/broches restants... au hasard OU Et faites tourner de nouveau le moteur entre vos doigts ......si vous ne sentez rien de différent au niveau résistance en rotation de l'axe Changer le shunt de place ou l’épissure entre les câbles (toujours avec celui que l'on a identifié A comme référence ) jusqu’à ressentir une résistance à la rotation avec l'un des autres 2 autres câbles restant (pas énorme mais très sensible cette résistance à la rotation) une fois trouvé .... identifiez AUSSI ce câble trouvé A A ce stade c'est fini ... nous avons une paire (mdr) correspondant à une bobine .... identifiez B la paire restante (les 2 autre fils ... quoi) Ce phénomène de "résistance" ressentie, est lié aux courants de Foucault qui sont générés par la rotation (comme les ralentisseurs électriques sur les camion, bus ...) Note Importante à ce sujet :Ces courants induits sont importants, il peuvent amener des dysfonctionnements (graves des fois) pas dans le cas ce tuto .... mais lorsque le moteur est raccordé à la carte contrôleur. En manipulant le plateau (Y)ou le chariot (du X) pour une cartésienne... les bras pour une delta...,suffisamment rapidement et de façon prolongé le moteur se comporte comme une dynamo et envoi le courant ainsi généré dans la carte contrôleur et peut la détruire ou tout au moins tuer le stepper associé à l'axe. Avec un multimètre ... ben c'est pareil ... quand c'est pas bon vous avez une résistance infinie (ou très très élevée) quand vous avez trouvé une paire la résistance est de quelques ohms... Nous ne pouvons pas définir encore la polarité des bobines ... nous allons le faire ... ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ PS je publie ce doc pas tout à fait finit car il est assez important et que je n'ai pas envie de le paumer... je le refais pas Reste donc la polarité des bobines et le sens de rotation mais entre les 2 je ferais le réglages des steppers peut etre. Il me reste aussi tout les liens promis à rajouter sur les chapitre ... Et vos apports ou éclaircissements ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ Voili voilou pour l'instant Plus d'information :
-Redimensionne(51).jpg.549c39c3c5d477afcd73a165716103a4.jpg)
-plumeau31@gmail.com-Gmail.jpg.3a58789f1eaf576327200ea4b2eb30fb.jpg)
-plumeau31@gmail.com-Gmail.jpg.9b9ff9a8a13f3e39fd29877052a836f6.jpg)
-plumeau31@gmail.com-Gmail.jpg.1bbde71730c43bfa07f3c8ed43ec23d3.jpg)
-plumeau31@gmail.com-Gmail.jpg.192141999030632023dd09dd3487be44.jpg)
-plumeau31@gmail.com-Gmail.jpg.4855a30208f4ad0e34a9a80ec40b1fd4.jpg)
-plumeau31@gmail.com-Gmail.jpg.02abcb7159b4f591a5ab3f68ddd214e9.jpg)
-plumeau31@gmail.com-Gmail.jpg.ce08e080c3ab5c195d989da2308e841b.jpg)
-plumeau31@gmail.com-Gmail.jpg.7e9d8e52a6f9a7856d6f4860b8ceea92.jpg)
-plumeau31@gmail.com-Gmail.jpg.1b2377ba02876dd76e54bbc9068c83fa.jpg)
-plumeau31@gmail.com-Gmail.jpg.85cf108e462bbdc6425286de533608a1.jpg)
-plumeau31@gmail.com-Gmail.jpg.ceaf23863a8172534777d2d0a31150be.jpg)
-plumeau31@gmail.com-Gmail.thumb.jpg.49a9196a4222ea8300ce1f5c16128d5a.jpg)
 1 point
1 point -
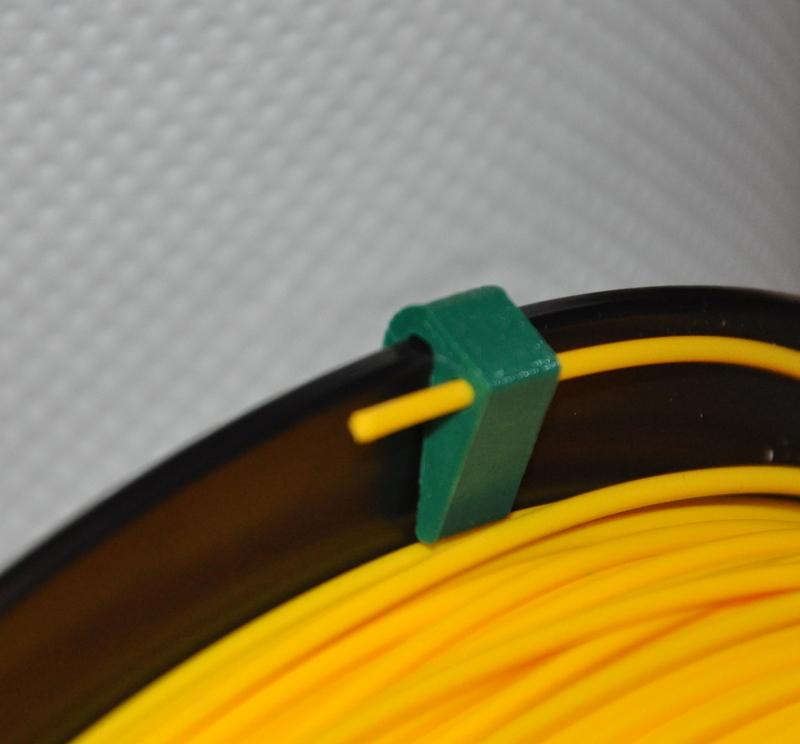
Salut à tous, N'ayant pas trouvé mon bonheur sur Thingiverse, je me suis fait un petit clip maison adapté à mes bobines de marque Ice le résultat : Avant le tranchage : et pour ceux que ça intéresse le fichier FreeCAD et le stl clip filament 7mm.FCStd clip filament 7mm.stl Imprimer en layer 0,1 et infill 40% pour que ce soit précis et solide. Cordialement
 1 point
1 point -
On en parlai surtout concernant l'impression du fang, pour info les filaments Sakata (PLA Ingeo 3d850/870) viennent de débarquer sur Amazon et à prix très intéressant. Perso je vais vider leurs stocks x) Y'en a déjà pas mal en rupture1 point
-
Bonsoir noBru77, thsrp Comme elle détecte bien le verre j'en ai commandée une ... Avec les délais de livraison j'aurai le temps d'attendre le résultat de tes essais Bonne soirée,1 point
-
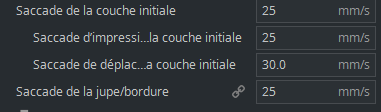
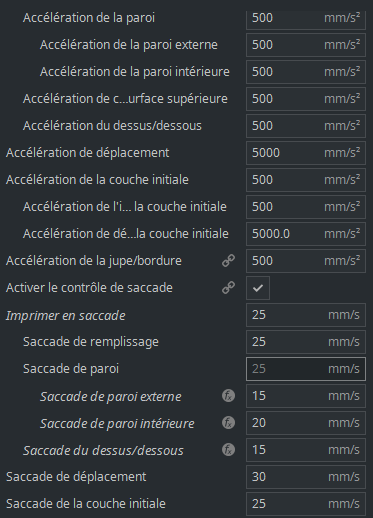
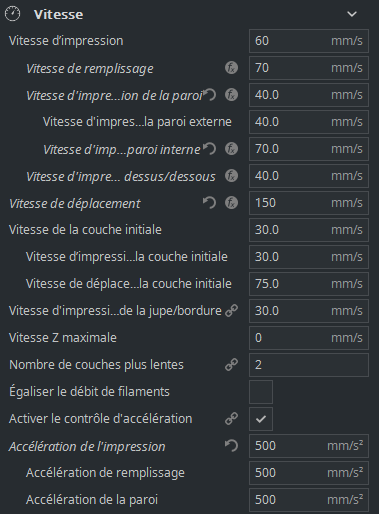
Sur une CR10S (modèle S3 donc 300x300x400) les moteurs X ,Y et E (extracteur) sont des 40mm et ont un courant moteur de 1A. Celui (ceux) de l'axe Z sont plus petits (34mm) et ont un courant moteur de 0,84A. La formule pour calculer la Vréf à utiliser est 0,71 x Imoteur * Rsense * 8 (pour des pilotes A4988 avec un Rsense de 0,1ohm) donc: X, Y , E => 0,71*1*0,1*8 ~ 0,57V Z => 0,71*0,84*0,1*8 ~ 0,48V (mais comme il y a deux moteurs sur l'axe Z des CR10S) on peut aller jusqu'à multiplier par 2 cette valeur pour que chaque moteur reçoive le courant dont il a besoin (mais comme on préfère rester "sécure", on applique un coefficient de marge de sécurité de 80-90% donc au lieu d'avoir 2*0,48 on utilise 2*0,48*0,85 ~ 0,8 )). Rappel pour le cas où: Ce réglage se fait via un tournevis non-conducteur avec les câbles des moteurs débranchés de la carte mère. Le potentiomètre est sensible donc on y va pas à pas . (Plus d'explications, ici ou là ou bien encore là dans la section Tutoriels, ce site donne aussi de bonnes explications (parfois contradictoire avec celles données dans le forum )). Voici les paramètres que j'utilise sur ma CR10 avec Cura pour les accélérations et le jerk:
 1 point
1 point -
Je comprends pas que l'on en soit encore avec des pinces... Je tourne avec de la patafixe, une très très Fine couche, aucun problème pour chauffer et ça tient pas possible, à tel point que j'ai du mal à enlever le verre.1 point
-
Oui ça doit être normal car la mémoire du uni est très limité et gbrl a été intégré au chausse pied.1 point
-
Le pire c'est que ma pièce fait 15 cm dans le sens de la largeur. je vais essayer ce soir en desactivant l'auto leveling par le menu de l'ecran , on ne sais jamais !1 point
-
@Bosco2509 : tu as commandé les drivers en même temps que la carte ? si oui , en general , ils les livrent prédisposés pour le mode UART , ca coute rien de vérifier quand tu recevras le colis1 point
-
Bonjour, la difference entre uart/step-dir est principalement : en step/dir , c'est la position des cavalier MS1/2/3 qui determinera le pas des drivers ( en general 16 microsteps quand MS1/2/3 sont pontés ), le reste des parametres sera géré par la programmation du driver , c'est aussi le mode que l'on appelle "standalone". Tu mets en place le driver et c'est fini. En uart , les drivers seront controlés logiciellement , tu pourras regler l'intensité , le mode stealchop , et plein d'autres choses via des commandes Gcode donc oui , il vaut mieux utiliser ce mode , surtout avec ce type de carte ou ca se fait avec des jumpers .1 point
-
C'est une base en verre plus mince que celui de la U20 et sans adhésif. Donc chauffe mieux. Pour le plateau je chauffe à 65° au départ et la séparation de pièce se fait très facilement.1 point
-
oui… transféré…1 point
-
Les moteurs de marque hanpose sont réputé être très silencieux (https://fr.aliexpress.com/store/group/NEMA17/1021965_509285770.html?spm=a2g0w.12010612.8148362.2.2aa55e92YtA5Pn&origin=n&SortType=bestmatch_sort&g=n) Je viens de me payer un pack de 5 17sh8401s pour remplacer les moteurs des axes et un pack de 3 17hs3401s pour les 2 z. J'attends plus que des tournevis céramiques, pour pouvoir régler les vrefs sans risque de court circuits, pour pouvoir les monter. edit: il faut juste inversé les fils extérieurs sur les prises d'origines des moteurs pour pouvoirs les faires fonctionnner.1 point
-
Salut ! Pas de souci ! Voici la version avec laquelle je tourne, elle se flashe directement via la carte SD, comme Smoothieware. Marlin = firmware.bin TFT = mks_config.txt Pour les autres fichier du TFT il n'y a pas de modif à faire, juste choisir ceux que tu veux selon le thème désiré.1 point
-
Des interressés pour la version Capricorn XS ?
 1 point
1 point -
@vieur : Une modification simple à effectuer : un coupleur rigide ...1 point
-
D'après ce que j'ai compris, sur les SPI, les 4 pins SPI sont soudés vers le haut (et le solderpad est peut-être soudé en mode SPI, à confirmer) pour les controler par l'interface SPI. Sur la version DIY, il faut souder les pins soi-même. Je crois qu'il y a aussi une version Standalone avec tous les pins soudés vers le bas pour que ça tourne mode par défaut.1 point
-
Dernière pièce support moteur avant gauche en cours de print, les 4 axes de 10mm X 600mm sont dans l'avion Il me manque des équerres internes pour finir les fixations
 1 point
1 point -
monsieur est Québécois, ceux ci explique peut être cela1 point
-
Salut ! Je viens de faire un print avec du filament flexible Recreus Filaflex, avec la pièce guide filament pour l'extrudeur, ça marche très bien ! Température buse : 240° ( c'est un peu plus que la température recommandée, mais les lignes m'on semblé mieux collées entre elles qu'à 230°) Température plateau : 30° ( recommandé 0°, j'ai mis 30° histoire d'avoir une température stable tout au long du print, en tout cas aucun risque de décollage c'est sur...!) Vitesse d'impression : 20mm/s Débit : 120% (sinon on obtient un résultat poreux, je pense qu'on peut même encore augmenter un poil) Rétractation : 3.5mm (recommandé par le fabricant entre 3.5 et 3.9mm) Vitesse de rétractation : 40mm/s Distance de débrayage : 0.40mm ( que l'on peut allègrement augmenter je pense, pour éviter le stringing...) Épaisseur de couche 0.2mm EDIT: Après d'autres essais sur d'autres pièces, il semble que la température de buse idéale soit 235°, le débit 125% et une distance de débrayage de 1mm semble donner de bons résultats sans trous, mais ma pièce actuelle étant imprimée sans déplacement au dessus du vide, je ne peux pas savoir si ça réduit le stringing.1 point

-plumeau31@gmail.com-Gmail.jpg.29bca0bb193cafbc4c4b945e269558a6.jpg)