
Classement


Contenu populaire
Contenu avec la plus haute réputation dans 02/06/2021 Dans tous les contenus
-
Bon je me suis occupé de monter le châssis en mode proto déjà pour valider le moteur et le rapport de réduction, pour l'instant je n'ai pas mis de frein ! Enfin le châssis c'est un grand mot vu qu'il n'y en a pas, juste 2 barres en alu, l'ensemble est étonnamment léger avec ce moteur un peu lourd de 650gr, en tout si je me débrouille bien je devrait rester sous les 3 kilos en ordre de marche, il faudra que je rajoute un tube alu sur le dessus pour plus de rigidité, là c'est fait de bric et de broc il va falloir que je refasse de vraies pièces en impression 3D, il y a encore du boulot Pour l'instant j'ai fait l'essai en propulsion pure et c'est rigolo car ça chasse du derrière, du coup le mode 4x4 n'est peu être pas indispensable mais je le prévois au cas ou Voila donc pour ce premier essai roulant avec du carburant qui doit avoir entre 10 et 20 ans en 16%, j'ai encore du 25% mais comme du coup c'est interdit à la vente autant tester si ça fonctionne aussi au 16% Denis3 points
-
Salut, Comme dis @PPAC : réglage plateau Puis réglage extrudeur. Et ensuite lance toi ! ca va pas exploser ! Généralement les utilisateurs commencent pas des pièces toute faites pour personnaliser leurs machines. -- thingiverse.com ou yeggi.com pour trouver ça PS : Fait aussi un truc joli pour Madame/Les enfants (WAF oblige)2 points
-
Bonjour à tous! Pour mon premier post, je tenais à partager ma configuration pour la Homers Tarantula Pro. J'ai acheté récemment cette bécane, et j'ai voulu mettre à jour le firmware (fourni de base avec un Marlin 2.5.0.3) J'ai eu un nombre incalculable de galères!! (cf Prob Téléversement Marlin) et du coup j'avais envie de partager la BONNE conf avec vous! (je tiens fortement à remercier @PPACet @remibora qui m'ont été d'une aide incroyable (Difficile de mettre un pied dans l'impression 3D !!) Donc le zip contient le configure.h, le configure_adv.h et le platformio.ini ainsi que le bin déjà compilé pour la configuration suivante (celle par défaut lors de l'achat de cette machine): Homers Tarantula Pro (évidemment) + MKS SGEN L V1.0 + MKS_MINI_12864 Je ne sais pas si c'est la bonne section pour poster ce genre de choses, mais j'ai TELLEMENT galéré, que j'avais vraiment envie d'aider les possesseurs de cte brele! Bonne journée à tous. PS: suite au message de @remibora j'ai recompilé le firmware avec le fichier cpp mis à jour.. MARLIN2.0.7.2_FIRMWARE.zip1 point
-
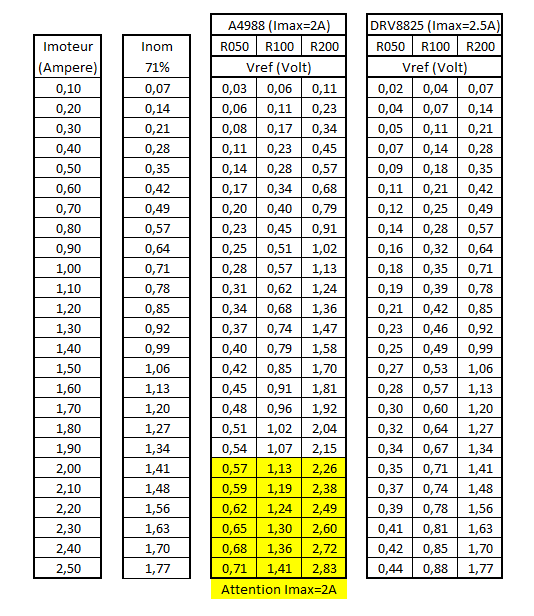
Bonjour à toutes et tous, J’entends souvent beaucoup de choses sur le réglage des drivers moteurs, bien souvent on me parle d’un réglage usine hypothétique, ou à l’oreille ou lors des nuits de pleine lune quand le vent souffle à l’ouest ! Je lis souvent « moi j’ai une Vref à 1.6V » et ça ne veut rien dire car il manque des informations capitales ! Le courant généré peut passer du simple au double ou même être hors limite si les modules ne sont pas strictement identiques ! Donc NON, le réglage de la tension de référence (Vref) sur un driver de moteur pas à pas ne se fait pas de manière empirique ! Il faut absolument connaitre plusieurs caractéristiques pour régler correctement ces bestioles. - Coté driver, le circuit utilisé A4988 ou DRV8825 a son importance et va surtout de pair avec la valeur des résistances « Rsense » qui sont présentent sur le PCB, elles-y sont souvent sérigraphiées « S1, S2, S1X, S2X, R1, R2…», et peuvent avoir comme valeur 0.05 ohm (Marquage R050), 0.1 ohm (R100) ou 0.2 ohm (R200) donc on sort la loupe pour être sûr. - Coté moteur, il faut chercher son courant de fonctionnement par phase (Imax) qui a été calculé par le fabriquant en fonction de ses caractéristiques. Si ce courant n’est pas indiqué par le vendeur du moteur, on cherche chez SON fabriquant avec SA référence dans son datasheet. Sous-alimenté, il va perdre son couple et risque même de vibrer sans pouvoir garder sa position stable. Suralimenté, il va faire beaucoup de bruit par résonance et bien entendu surchauffer (le driver également par contre réaction). Après une longue discussion avec un constructeur de moteur de type Nema (GE), il s'avère que le Imax d'un moteur n'est pas son Inominal, il faut donc diviser Imax par racine de 2 pour trouver Inom. j'ai donc mis à jour le tableau en correspondance. On calcule donc la valeur de Vref à régler avec le petit potentiomètre, la formule est donnée dans le datasheet du constructeur du driver, et est : on calcule Inom = Imax divisé par racine(2) Pour un A4988 : Inom = Vref / (8 * Rsense) donc Vref = Inom * 8 * Rsense Pour un DRV8825 : Inom = Vref / (5 * Rsense) donc Vref = Inom * 5 * Rsense La valeur maximale de la limitation de courant est donc définie en interne en fonction de la valeur des Rsense et de la tension de la broche Vref. Exemples de calculs : Un A4988 avec des Rsense de 0.05 ohm (Marquage R050) et un moteur avec un Imax à 1.8A, Inom = 1.27A : Vref = 1.27 * 8 * 0.05 = 0.51V. Un DRV8825 avec des Rsense de 0.1 ohm (Marquage R100) et un moteur avec un Imax à 2.1A, Inom = 1.48A : Vref = 1.48 * 5 * 0.1 = 0.74V. Un A4988 avec des Rsense de 0.2 ohm (Marquage R200) et un moteur avec un Imax à 1.5A, Inom = 1.06A : Vref = 1.06 * 8 * 0.2 = 1.7V. Important : Le courant maximum par phase pour un A4988 est de 2A et 2.5A pour le DRV8825. Donc si vous êtes dans la limite haute de votre drivers, réduisez un peu Imax. La température du driver peut monter à plus de 150°C si son courant arrive à son maximum admissible et il doit être de toute façon correctement refroidit par un dissipateur et si possible par un flux d’air au-delà de 1A par phase. Il passera en protection thermique et coupera le courant moteur si sa température arrive hors limite. Voir les datasheets pour les courageux, dont les tableaux « Relative Current and Step Directions » et « Step Sequencing Settings ». http://www.allegromicro.com/~/media/Files/Datasheets/A4988-Datasheet.pdf http://www.ti.com/lit/ds/symlink/drv8825.pdf Pour les TMC2xxx, il suffit de prendre Inom du tableau et de régler Vref à la même valeur. ex moteur 1.5A, Inom = 1.06A, Vref = 1.06V attention ceci n'est valable que pour Rsense = 110mΩ la formule donnée par Trinamic est IRMS = 325mV / (RSENSE + 20mΩ) * 1/√2 * VREF/2.5V avec des RSENSE = R110 = 110mΩ nous simplifions puisque 325/(110+20) = 2.5 (c'est pour ça que l'on trouve les pilotes avec ces valeurs de RSENSE sur le marché) IRMS = 2.5 * 1/√2 * VREF/2.5V 2.5 / 2.5 = 1 donc IRMS = 1/√2 * VREF je me débarrasse de 1/√2 en multipliant par √2 des deux cotés √2 * IRMS = √2 * 1/√2 * VREF donc √2 * IRMS = VREF VREF = √2 * IRMS et nous savons que IRMS = IMAX / √2 VREF = √2 * IMAX / √2 donc VREF = IMAX comme on prends 70% par sécurité, pour un courant de 1.5A, nous avons 1.5*0.7 = 1.05, réglage de VREF à 1.05V et ça tombais bien, puisque en prenant 70% de sécurité, c'est comme si on divisais par √2 (0.707...) c'est une astuce d'électronicien c'est comme si en prenant 70% de sécurité, on prenait la valeur RMS de ce courant IMAX pour simplifier, avec 70% de sécurité, IMAX * 0.707 = IMAX / √2 = IRMS donc on peut régler VREF à la valeur APPARENTE de IRMS, sous entendu que ça contient déjà les 70% de sécurité. mais ça ne fonctionne qu'avec des RSENSE à 110mΩ vous trouverez un XLS pour ces calculs, vous pouvez y changer Rsense si ça valeur n'est pas standard. ATTENTION les TMC sont hyper sensible à la température, ils doivent impérativement être refroidit sous un courant d'air, avec un dissipateur conséquent. Bonne lecture. Stef le tableau corrigé pour avoir une idée de Vref en fonction des valeurs d'Imax du moteur. TMC_Vref_V2.xlsx
 1 point
1 point -
Bonjour, Juste une petite info pour les débutants sur FreeCAD. J'ai découvert la chaîne de ce youtubeur qui présente des vidéos intéressantes pour les débutants : https://www.youtube.com/channel/UCFJHHAl-O_zHKDip3M4cVZQ/videos Il travaille avec la version 0.17, ce qui plus à jour que les anciens tuto en version 0.16 ou inférieures maintenant obsolètes. Si ça peut aider...1 point
-
Peux tu faire plus de photo de ton installation ? bed/axes etc... stp Les ressorts doivent être bien compressés si tu veux une bonne tenue et on ne joue pas sur ces réglages pour passer un moteur donc il faut chercher le problème ailleurs.1 point
-
Salut, Apparemment, ta buse était trop proche du plateau. Comme tu sembles avoir réussi à imprimer quelque chose, on peut supposer que la buse a dû finalement monter. Du coup en vissant les molettes de réglage du plateau d'1/4 de tour soit 0.175mm, tu devrais améliorer les choses. Pour mémoire, lorsque l'on règle le niveau du plateau (buse et plateau à température d'impression) , il faut vérifier au moins 2 fois chaque angle avec la feuille qui frotte mais pas trop pour être sûr. Pour le décollement, il est préconisé d'attendre le refroidissement du plateau, patience,patience... Peut-être que la température configurée dans le fichier était trop haute. Tu peux la modifier, dans un éditeur de texte comme notepad, en recherchant les lignes, au début du fichier, qui contiennent M140 et M190. En changeant la valeur qui suit ces gcodes (= commandes), tu modifieras la température du plateau. Habituellement, on a ces valeurs pour du PLA: M140 S60 M190 S60 PS: on parle plutôt de galets que de roulettes. Ça rappelle le bord de mer, les vacances...1 point
-
Salut @garcmi, 1- A priori, il n'y a pas de raison de décommenter la ligne suivante de ton fichier configuration.h, puisque tu as choisi l'asservissement par PID: 574: #define BED_LIMIT_SWITCHING 2- es-tu sûr d'avoir une capteur de température ambiante? car tu as décommenté cette ligne : 661: #define THERMAL_PROTECTION_CHAMBER // Enable thermal protection for the heated chamber sans avoir déclaré de capteur de température: 470: #define TEMP_SENSOR_CHAMBER 0 EDIT: le message d'erreur "erreur temp max list" n'existe pas dans les sources. Tu es sûr que c'est le message qui apparait?1 point
-
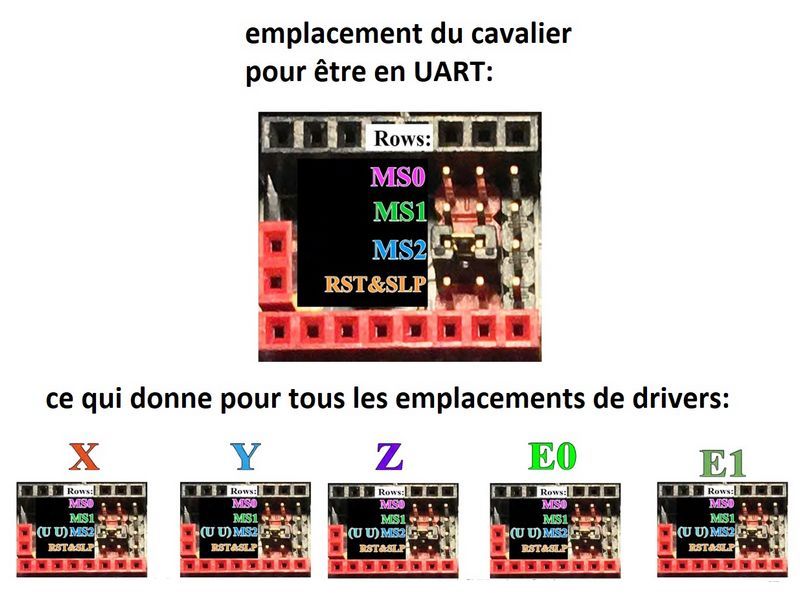
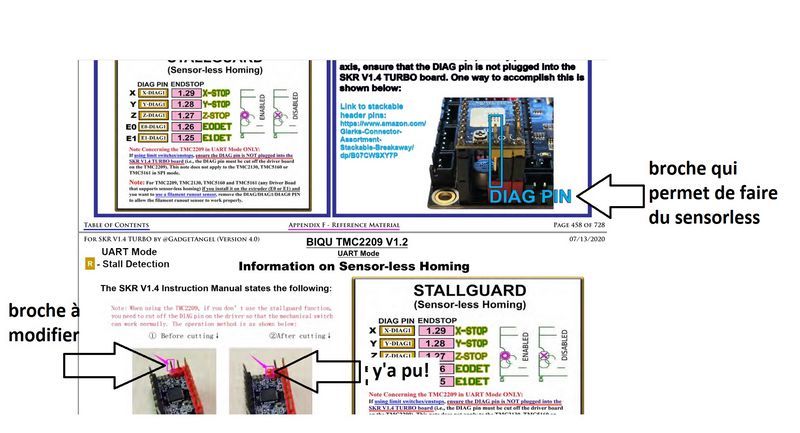
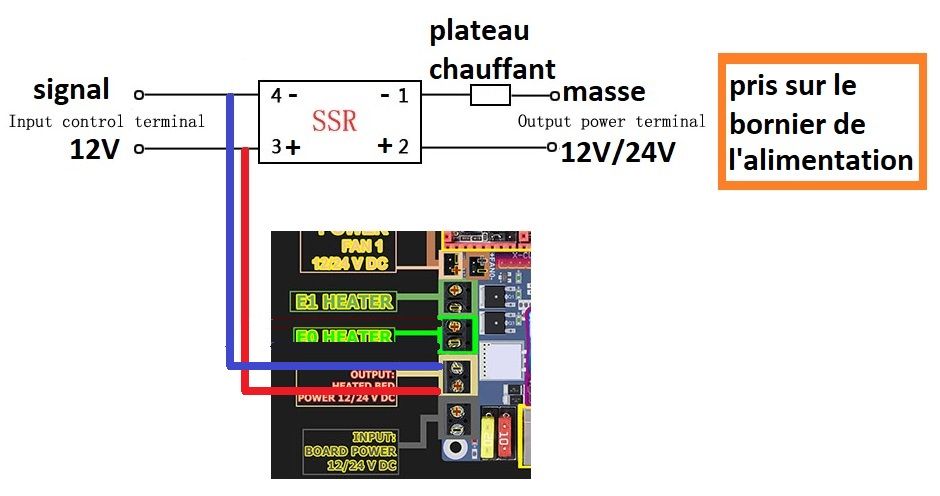
Salut, 1- En fait, tu places le cavalier en position USB lorsque la carte est alimentée uniquement par l'USB. Théoriquement, le flashage du firmware doit se faire dans ces conditions mais tu peux le faire simplement en démarrant la machine alimentée en 12V, avec le firmware sur la carte µSD. 2- Le schéma de câblage est le suivant: (info prise à partir de cette page) 3- Dans ce document, tu auras toutes les infos que tu veux savoir. En résumé, si tu ne veux pas de la prise d'origine en sensorless = Stallguard = pas de fin de course = pas de mechanical switch (je pense que tu as raison), alors tu dessoudes la broche (apparemment c'est assez facile, sinon tu la coupes): Comme tes TMC2209 sont compatibles avec le mode UART, tu n'auras qu'à placer un cavalier sur tous les emplacements de driver pour le mode UART: (en passant, tu vois dans quel sens insérer le driver ) 4- aucun, c'est à paramétrer dans les sources (pas/mm pour chaque moteur) 5- pour l'écran, je t'en parle en MP.
 1 point
1 point -
Cela veut dire qu’il y a un des trois composants de l’ABS dans le PLA pour le renforcer, certainement le styrène car c’est celui des trois qui est attaqué par l’acétone. De plus ce n’est pas onéreux.1 point
-
Salut @nyarlath, Oups , j'ai complètement oublié de te signaler que le fichier Marlin\src\sd\cardreader.cpp devait être remplacé par celui ci-dessous pour corriger un bug de reprise d'impression après coupure d'alimentation. cardreader.cpp1 point
-
Merci de partager la solution pour les prochains qui auront le problème ! J'ai juste pointé une direction, c'est surtout remibora qui t'a réellement guidé vers la solution ( je ne parle pas "le marlin" et ses variantes selon les cartes mère et/ou écrans utilisé aussi bien et couramment que lui ) Bonnes impressions et bonne continuation !1 point
-
Salut, Apparemment, la V2.4.1 est difficilement trouvable mais la V2.4 est dispo, par exemple ici (modèle appelé CR 10 max) ou là. Quitte à investir, je te conseillerais plutôt de partir sur la solution d'un Raspberry pi (3b ou 4 2go) avec octopi qui utilisera le port USB ou série. tu peux le trouver ici.1 point
-
Salutation ! Les PID a faire et l'axe Z a vérifier (nettoyage, lubrification, vérification du bonne assemblage du coupleur) comme proposé par Kachidoki et Titi78 Aussi bien vérifier que la bobine se déroule sans résistance ni accoue et que tu a un bon refroidissement de ton heatbreak et la bonne vref pour le contrôleur de moteur pas a pas de l'extrudeur et bien sur pas de points dure dans les déplacements de la tête et plateau , ni de jeu du plateau. A tu lu cela, il me semble que tu y trouvera des pistes ... Aussi, a tu fait un calibrage de l'extrudeur ? et du débit ? il y a aussi les PID :1 point
-
Si plus d'aide tu veux, configuration.h et configuration_adv.h fournir tu dois1 point
-
Hello, J'ai découvert le forum qu'après la livraison de mon ender 3 Pro. Merci quand même pour cette notice tout à fait complète. Je n'ai pas trouvé le montage ni top long ni trop complexe. Certains points de la notice de base sont en effet succincts, mais ça se fait. La vidéo de montage sur la clé donnée avec l'imprimante, pareil, je l'ai vu après le montage. Du coup, ma petite contribution, le montage de la mienne :1 point
-
Tu a pensé a passer sous Klipper ?.... Bien plus simple que marlin et tout aussi abouti ! Bref ... que du bonheur et des prises de têtes en moins ! PS : ce n'est que mon avis d’éternel newbie qui redécouvre le monde merveilleux de l'impression 3d1 point
-
Salutation ! Si tu a un multimètre, je commencerais par tester la tension de sortie du bloc transformateur. Puis après si bien du 12V comme attendue et que tu n'a plus de garantie, je regarderais dedans ... (prend nous des photos ! merci !) Mais je suis du genre a ne pas avoir peur de changer un condensateur bombé ou qui fuit ... donc a toi de voir si tu t'en sent capable. Et je ne suis pas sur d'etre une référence pour cela comme je n'ai pas cette machine. https://homofaciens.de/technics-machines-3D-printer-Longer-Orange-10_en.htm1 point
-
Se tromper de rubrique n'est pas grave. Si ça t'arrive de nouveau, tu peux signaler ton message, indiquer qu'il n'est pas dans la bonne section et l'équipe de modération le déplacera dans une section appropriée. C'est préférable à un doublon car en fusionnant les sujets, les messages peuvent se mélanger et le sujet final devient moins lisible.1 point
-
pour ton cordon je ne sais pas sous cura je pourrais y regarder demain mais pour les supports tu peux utiliser custom support en plugin. Et il existe des vidéos pour expliquer comment définir des paramètres différents suivant les couches1 point
-
Bonjour, je suis vraiment un bleu. je n'ai pas trouvé le plugin pour exporter en html, à part la mise à jour j'ai passé le chauffage de la buse de 200 à 210°c étant donné que j'ai changé de filament. J'utilise le polyterra mais je pense que je vais revenir à 200°. je me suis connecté à l'imprimante avec repetier sans faire de manipulations particulière, et par la suite CA A MARCHE ! je ne sais pas ce qui s'est passé. là quand je lance une impression la buse démarre à la bonne hauteur mais le filament n'adhére pas bien au plateau pourtant chauffant et en verre. ce soir je vais nettoyer le plateau avec de l'alcool et je refais le tes. Merci beaucoup à tous le monde c'est un forum génial !1 point
-
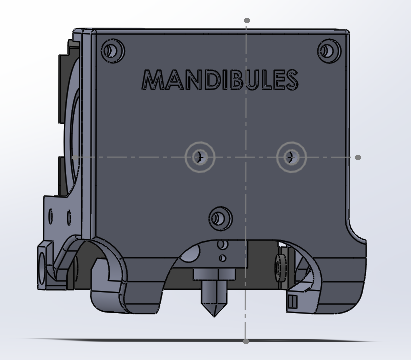
Oui c'est sûr dès que j'ai un peu de temps je mettrai sur thingiverse. Pour l'instant c'est trop tôt, puis il y a un youtubeur qui va peut etre en faire une vidéo. Je dis bien peut etre... Pour les inserts j 'ai déjà donné le lien et les vis, c'est les mêmes qui sont réutilisées. On a besoin en plus que de 3 nouvelles vis, c'est 3 xM3 en 12mm pour tenir la façade du fanduct, et deux autres pour tenir le ventilateur en 16mm. Bonjour, Aujourd'hui j'ai remonté ma tête V2 avec le corp de chauffe + chaussette E3D, et j'ai pu voir qu'une des deux mandibules touche la chaussette, du coup je modifier le design en écartant un peu plus les mandibules pour éviter que ca touche et que à la longue ca chauffe et ca se déforme. Je precise que pour la tête d'origine V2 ca passait très bien. Vois les STL modifiés: FanDuct_new_Capot_V5.STLFanDuct_new__top_V5.STL
 1 point
1 point -
Un grand merci pour ce super boulot que tu nous partages Penses à ajouter la liste des course en visserie et inserts stp, genre 8 x M3 20mm...ect.. Ça peut être utile pour ceux qui n'auraient pas de stock.. Ça pourrait être intéressant que tu le publie sur Thingiverse, il y a énormément plus de passage qu'ici et international, à voir comment il pourrait être remixé...1 point
-
Yo! la Team Vous m'y reprendrez pas pour assurer le standard de nuit ! Déjà il à fallu nettoyer tout votre b*rdel, entre les paquets de chips et les canettes vides qui trainaient ça et là, un scaphandre rempli d'algues, la litière des Shadoks à changer, ect... Bonjour l'odeur ! une vrai caverne d'ados... Et la déco n'en parlons pas. Placardé au mur, à coté du schéma du firmware et des croquis du fanduct, je sais pas qui a mit le giga poster de Pamela Anderson à oilpé dans ses beaux jours... mais c'est d'un gout ! Bref je me suis fait iéch toute la nuit entre 2 appels du genre "ya tout ki beug, j fé koi" Tout ça pour dire que je veux bien continué pendant les vacances pétanque de @Jonathan06 mais seulement à quart de temps et dans des condition de travail plus hygiénique... D'ailleurs @Jonathan06, tu t'absentes à partir de quand ? si t'es dispo la semaine pro et que ta proposition VIP online de flashage tiens toujours, je veux bien qu'on s'en occupe, merci1 point
-
Je suppose qu'il faut maintenir une température constante au cours de l'impression car une baisse provoquerait une rétractation de la matière et fragiliserait l'adhérence. Cependant peut-être qu'une petite baisse ça peut le faire. Personnellement j'utilise mon imprimante avec le plateau à 50° au début et jusqu'à la fin.1 point
-
Suffit de trouver la bonne personne. Moi par exemple, je n'ai acheté aucune imprimante.1 point
-
Les propos pornographiques ne sont pas tolérés sur ce site !1 point
-
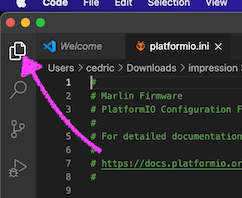
Problème résolu en installant une version personnalisée du firmware original Marlin. Tout d'abord, je remercie 1000 fois @Jonathan06 de m'avoir fourni les fichiers nécessaires, mais surtout d'avoir pris le temps de tout m'expliquer sur la méthode (et même plus). Ce que j'ai dû faire : Installation de Microsoft Visual Studio Code (je l'avais déjà, ça tombait bien ) Dans VSCode : Installer les modules complémentaires "PlatformIO" et "Auto Build Marlin" Télécharger les sources du firmware "Mks-Robin-Nano-Marlin2.0" Pour cette étape, j'avais pris les mauvaise sources au départ Heureusement, @Jonathan06 m'a envoyé le lien pour récupérer la bonne version Récupérer des versions personnalisées des fichiers "platformio.ini", "Configuration.h" et "Configuration_adv.h" Normalement, ça aurait dû être à moi de personnaliser ces fichiers pour les adapter à mon matériel Mais @Jonathan06 les avait déjà préparés pour moi et me les a fournis Ensuite, préparer tous les fichiers pour la compilation : Décompresser les sources du firmware Marlin dans un dossier Remplacer le fichier platformio.ini de ce dossier par la version personnalisée Dans le sous-dossier "Marlin", remplacer les 2 fichiers Configuration.h et Configuration_adv.h par les versions personnalisées Il faut maintenant aller dans VSCode pour compiler tout ça (Les manips peuvent un peu changer en fonction de votre OS, moi je suis sous MacOS) : Double-cliquer platformIO.ini pour qu'il s'ouvre sous VSCode (sinon, aller le chercher à la main dans le logiciel) Une fois dans VSCode, cliquer à gauche sur l'icône permettant d'ouvrir l'emplacement des fichiers sources Ensuite, cliquer sur "Open Folder" pour confirmer l'emplacement des fichiers sources Et là, normalement PIO Home doit s'ouvrir dans VSCode Etape suivante, lancer "Auto Build Marlin" grâce à l'icône qui doit être présente dans la barre latérale Clic sur "Show ABM Panel" Une fenêtre ressemblant à ça doit s'afficher : Dernière étape pour la compilation : Cliquer sur le bouton "Build" (visible dans la capture juste au dessus) A noter qu'il se peut que ça échoue la toute première fois, mais il suffit de relancer et ça doit passer à la deuxième tentative Maintenant que le firmware est compilé, il suffit de prendre le fichier "Robin_nano35.bin" et le dossier "assets" qui ont été créés dans le sous-dossier ".pio/build/mks_robin_nano35" (en tout cas, c'est l'emplacement que j'ai sur Mac) et de les copier sur la sdcard pour flasher sa machine. A noter que je n'avais pas le dossier "assets", et donc @Jonathan06 est venu à mon secours en me fournissant une copie du sien (ce dossier est le même quelques soient les personnalisations apportées au firmware). J'ai maintenant le menu "d'origine" du firmware Marlin, donc sans toute la partie graphique, mais avec toutes les options permettant de contrôler son imprimante correctement. Dernière remarque, lorsque l'on bascule sur cette version de l'interface, le module WiFi n'est plus actif. Mais perso, ça ne me dérange vraiment pas. Voici un test réalisé ce soir grâce aux scripts "Filament Change" de CURA qui se basent effectivement sur le code M600 : Couches 1 à 5 : filament noir couches 6 & 7 : filament rouge couches 8 à 10 : filament noir Problème résolu !!! Merci encore @Jonathan06

 1 point
1 point -
Bonjour @MBZ Il est possible de remercier un contributeur, en cliquant sur le cœur au bas de son post. Bonne impression1 point
-
tu le branche sur le même connecteur (AUX-1) que l'ancienne avec le même câble1 point
-
Firmware à utiliser sans modération, surtout le Linear Advance qui, si vous avez suivi le conseil de @Jonathan06 et remplacé le bowden par un de type capricorn, permet de ne plus avoir de cheveux d'ange et donc un rendu au top ! Pour ma part, je suis avec une configuration avec les 3 A4988 remplacés par des TMC2208 V2 (que j'avais en stock) et un BL Touch et j'ai imprimé plus de 3kg en PLA et PETG sans problème.1 point
-
Bof ! Oui, très bien, mais ce sont d'anciens tuto. Des débutants peuvent buter sur un truc et croire qu'ils ne savent pas faire alors que c'est les fonctionnalités qui ont changé dans les nouvelles versions.1 point
-
bon alors, ça y est, après des heures et des heures d'enquête, de tests, j'ai trouvé le coupable. Ce n'est ni l'extrudeur, ni le moteur, mais tout simplement le driver. un tmc2209 qui merde complètement. Je ne pouvais pas savoir mais j'aurais du commencer par ça, plutôt que par l'extrudeur et le moteur. Bon j'ai plus qu'à en commander un nouveau. j'en profite, quelqu'un a une bonne référence de vendeur sur ali (ou autre) de tmc2209 ?0 points
-
oui , c'est ce qu'il me semble à première vue. La rétractation normale a l'air de fonctionner même si le moteur vibre car la vitesse est faible. En revanche, en rétractation de changement de filament, ça vibre fort, comme si le moteur était perdu. c'est incompréhensible comme phénomène0 points
-
bon alors j'ai démonté le BMG et réinstallé le Titan sur extrudeur 1 et 2, et j'ai poussé un peu le voltage des drivers. l'extrudeur 2 fonctionne sans problème tout le temps. L'extrudeur 1 fonctionne, sauf en rétractation rapide du filament pour laisser l'autre filament prendre le relais. Il se met à vibrer de partout sans faire avancer la roue (que j'ai vérifiée aussi) . j'abandonne pour l'instant l'idée de dual color, je m'y remettrai plus tard , en remettant les drivers d'origine pour voir d'où vient ce problème de moteur qui vibre.. je sens que si c'est un problème moteur, je vais bien galérer à expliquer au SAV, qui a déjà du mal à comprendre que je n'ai aucun connecteur de détecteur de filament n°2...0 points

















