Classement



Contenu populaire
Contenu avec la plus haute réputation dans 07/04/2022 Dans tous les contenus
-
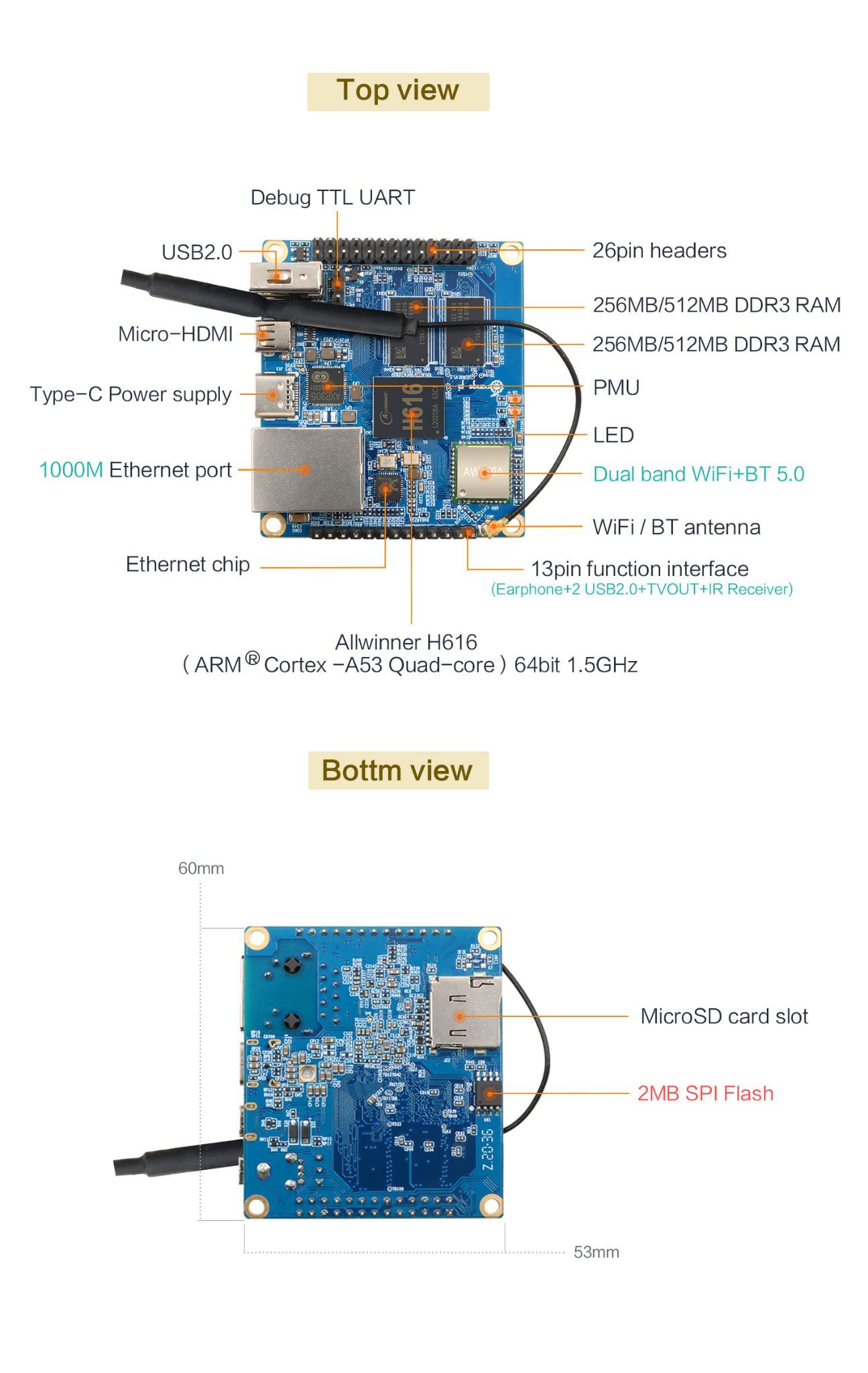
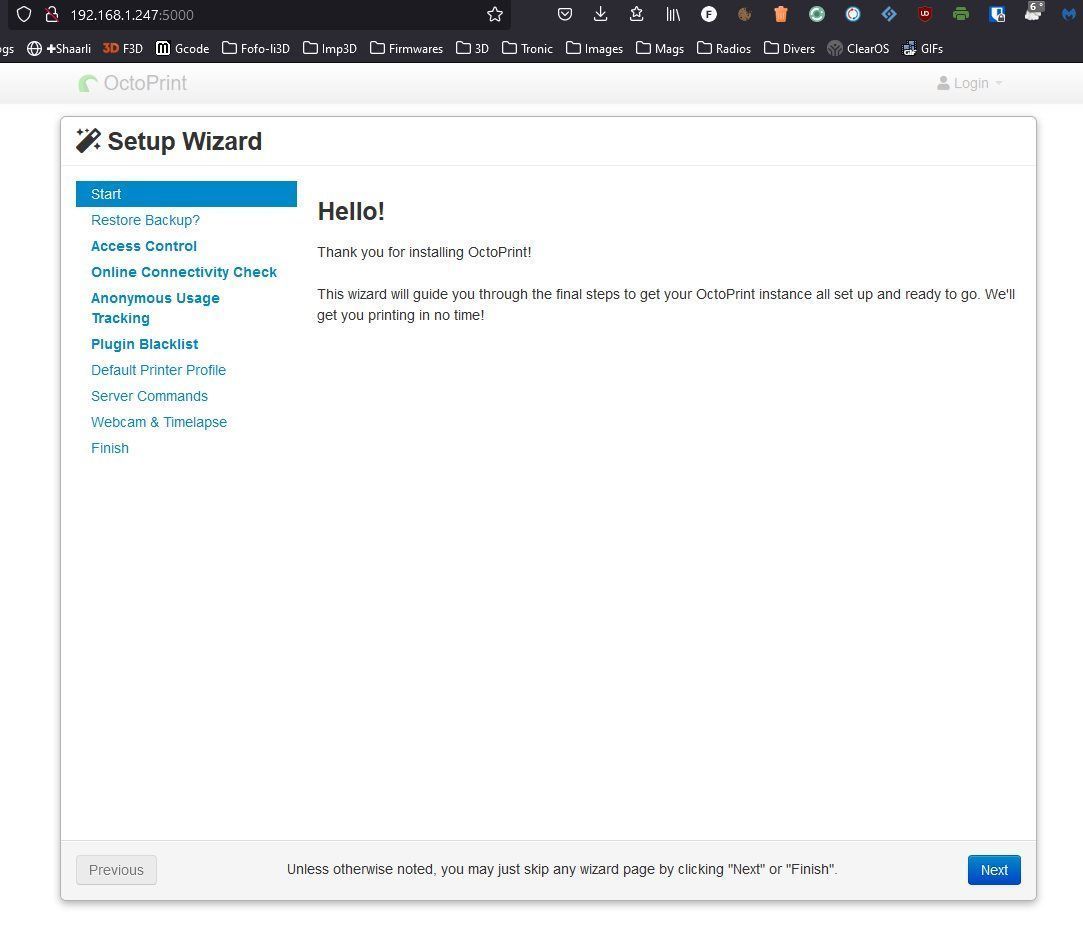
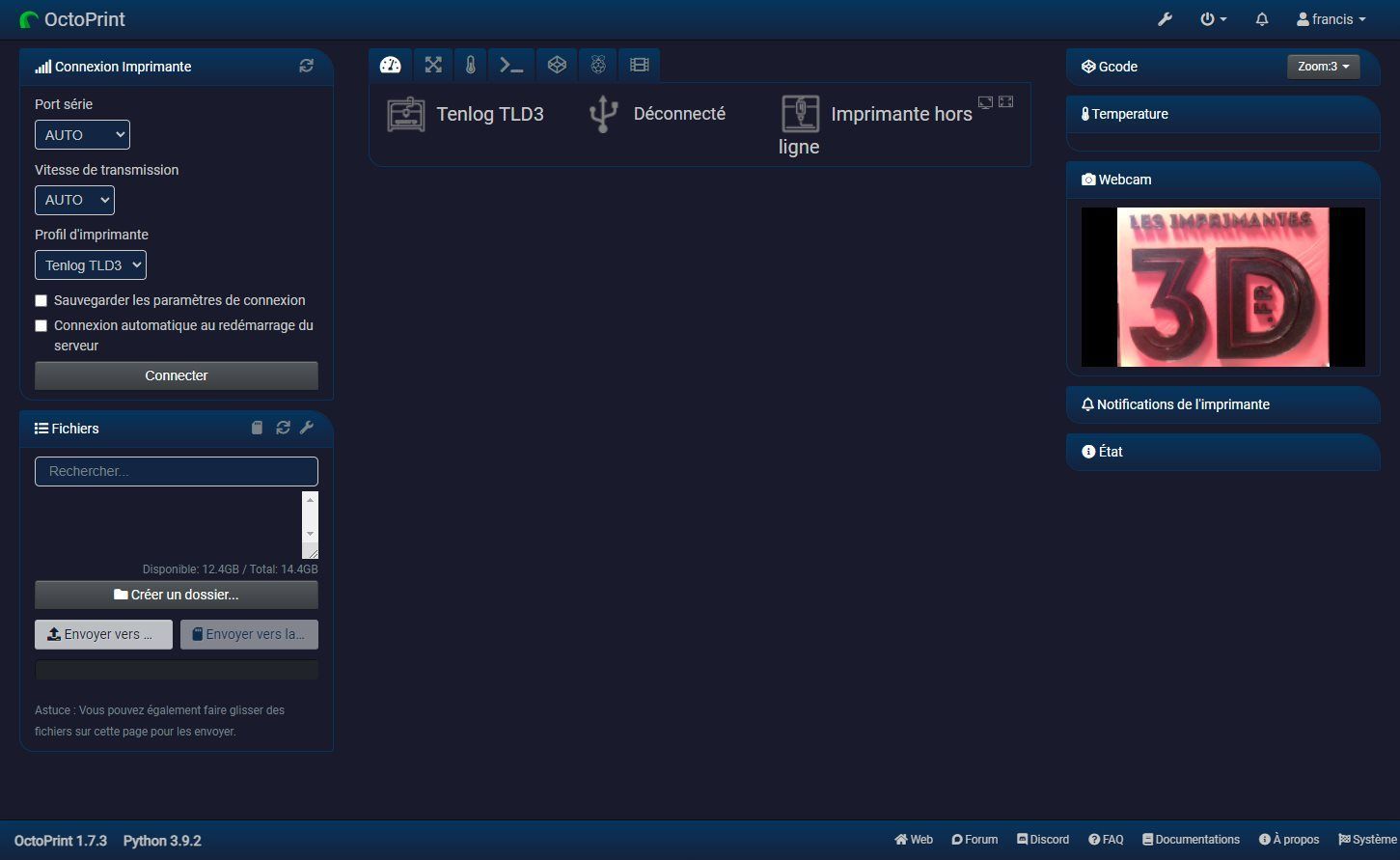
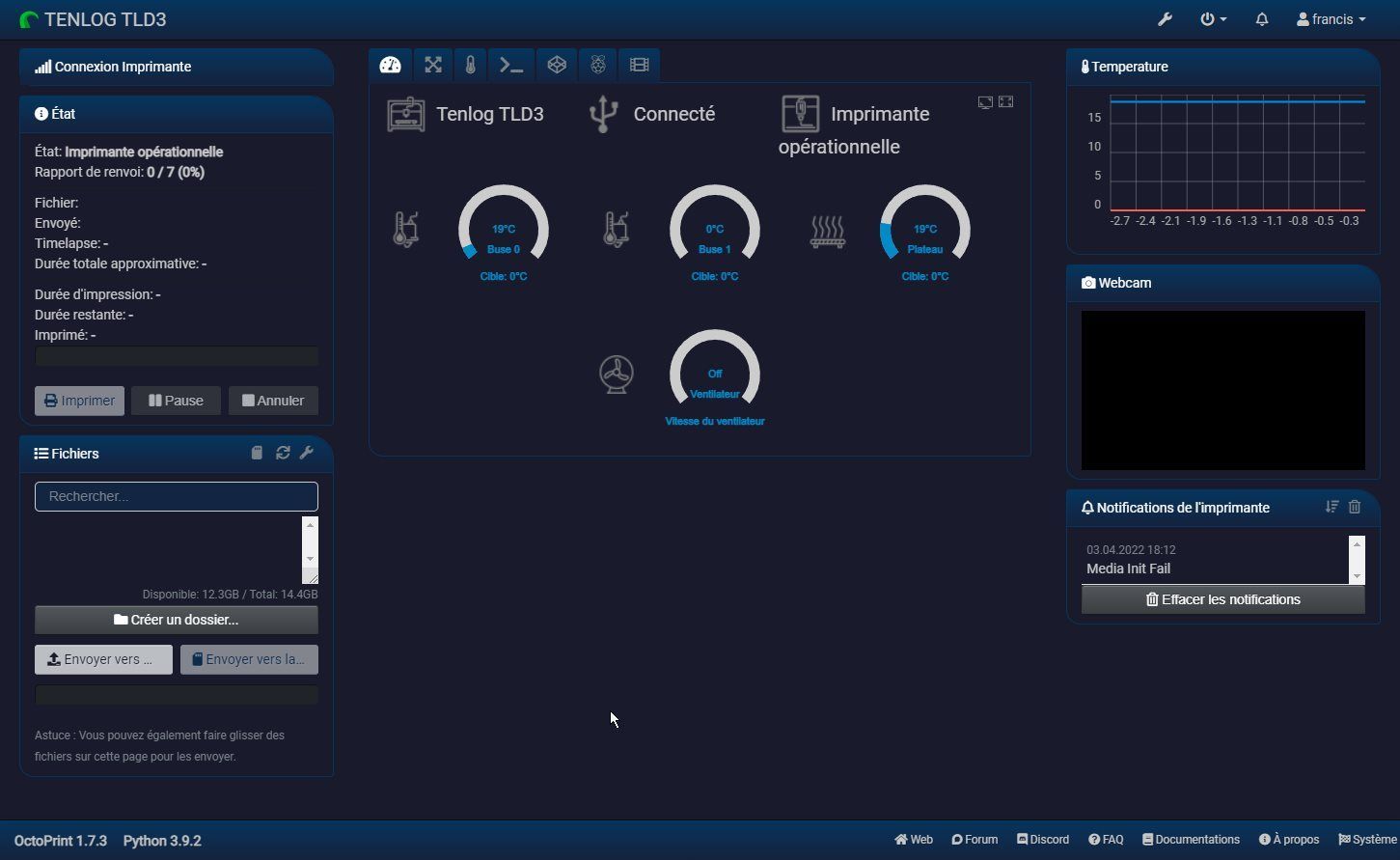
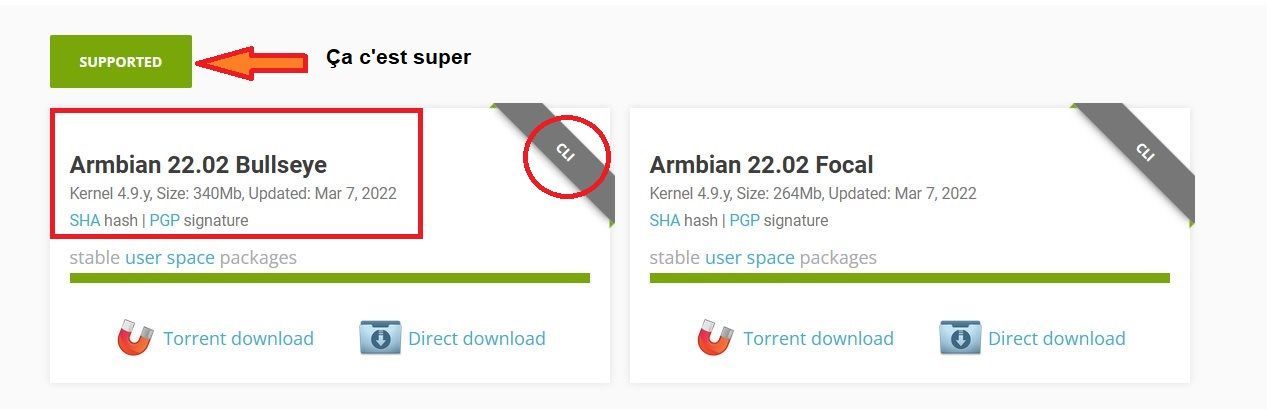
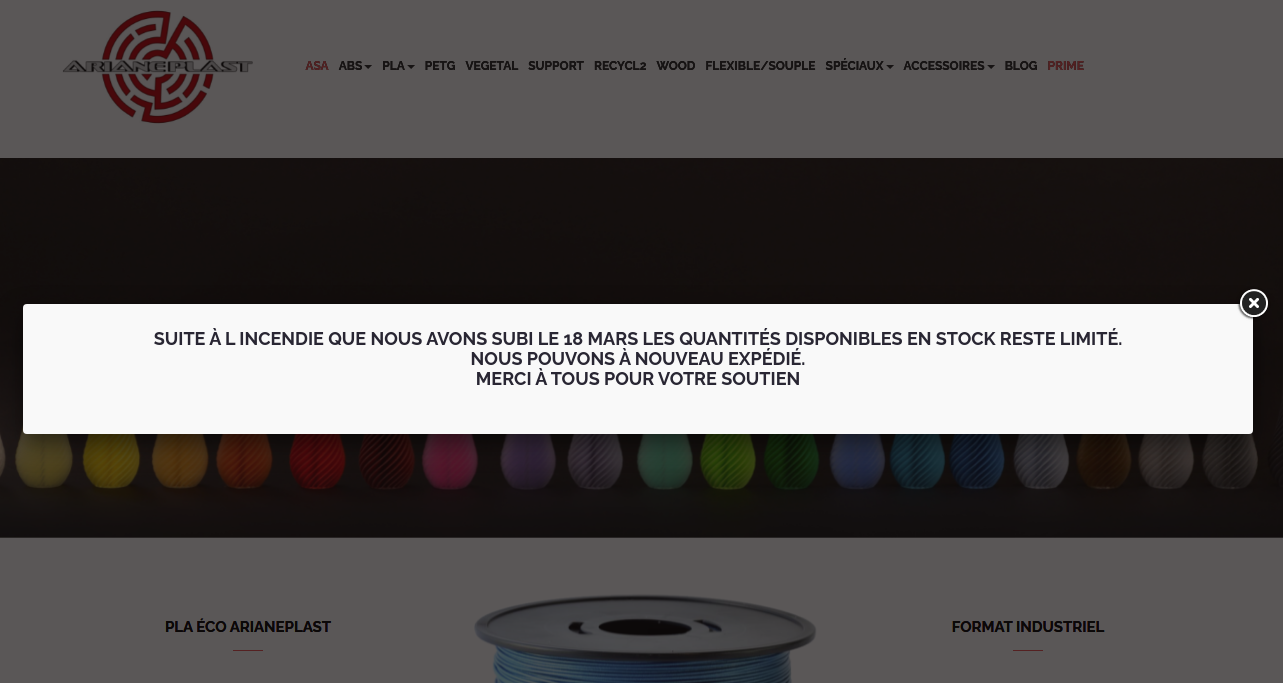
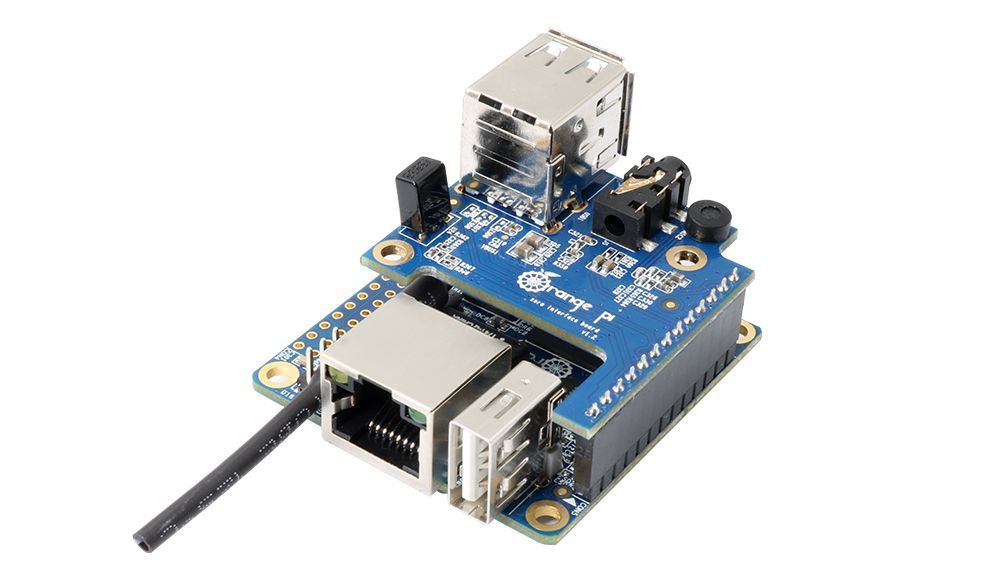
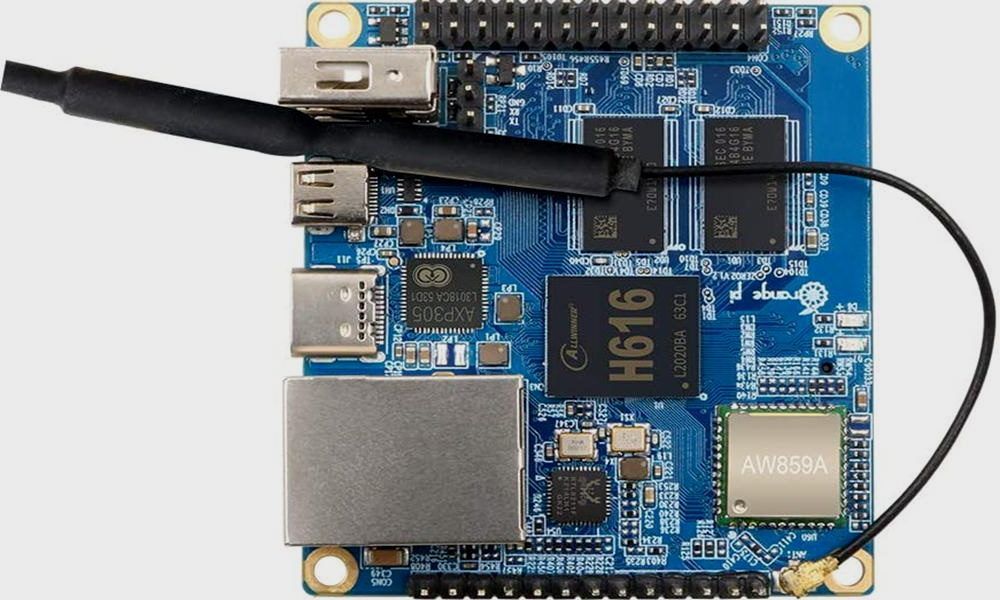
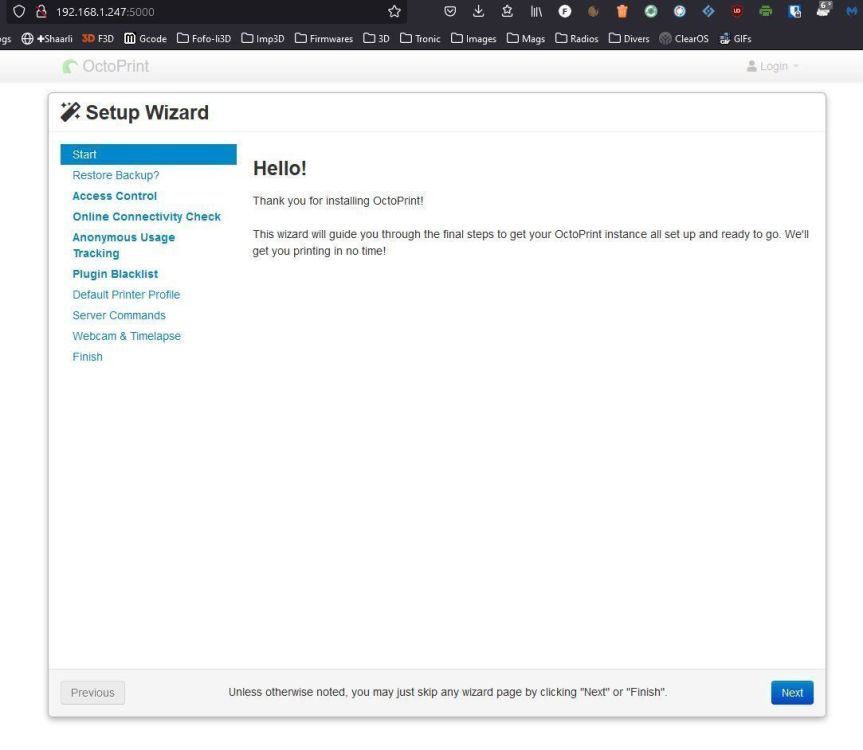
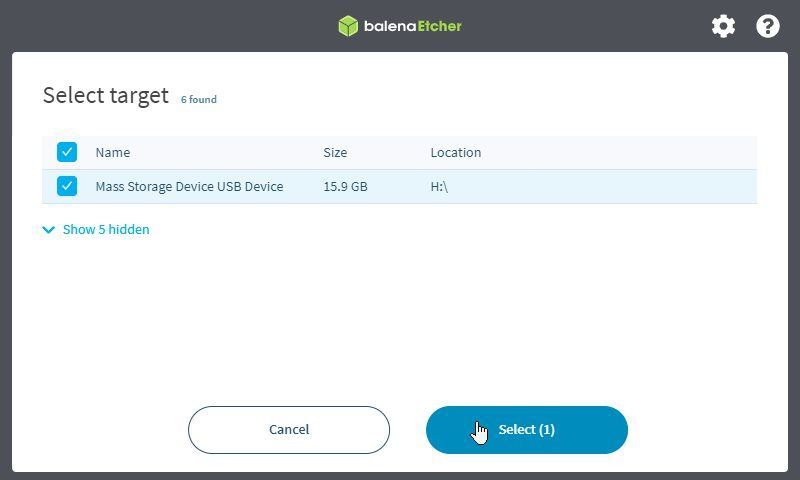
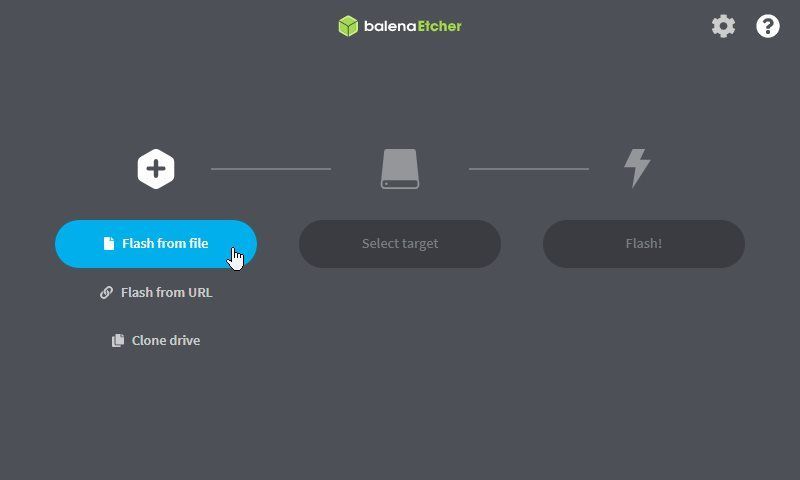
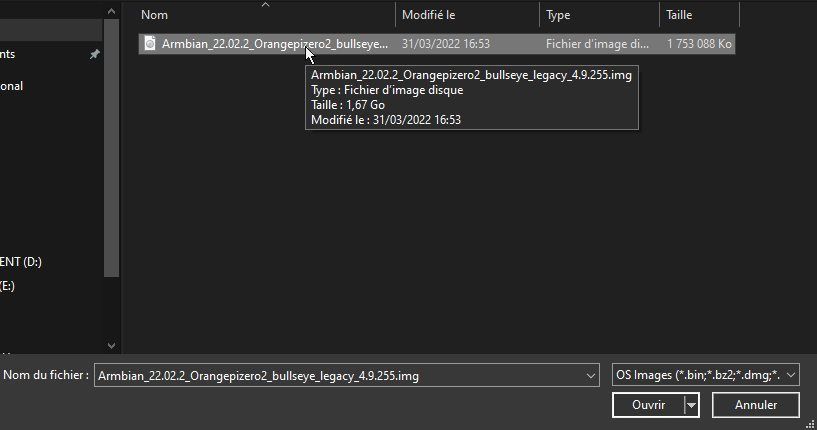
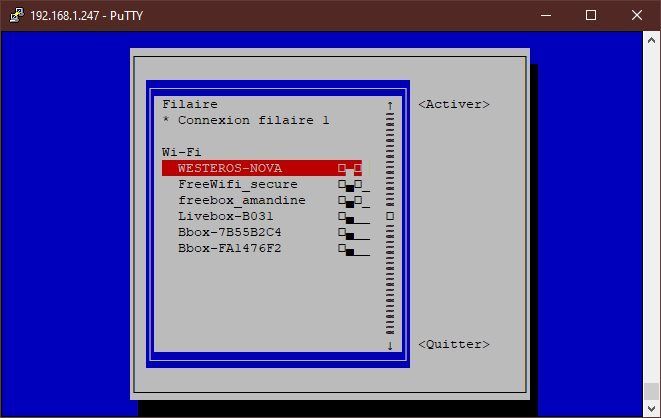
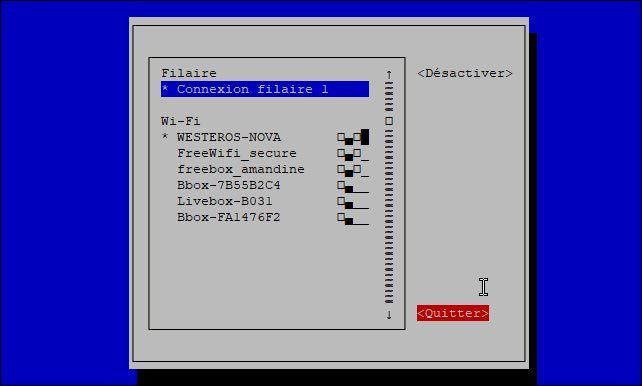
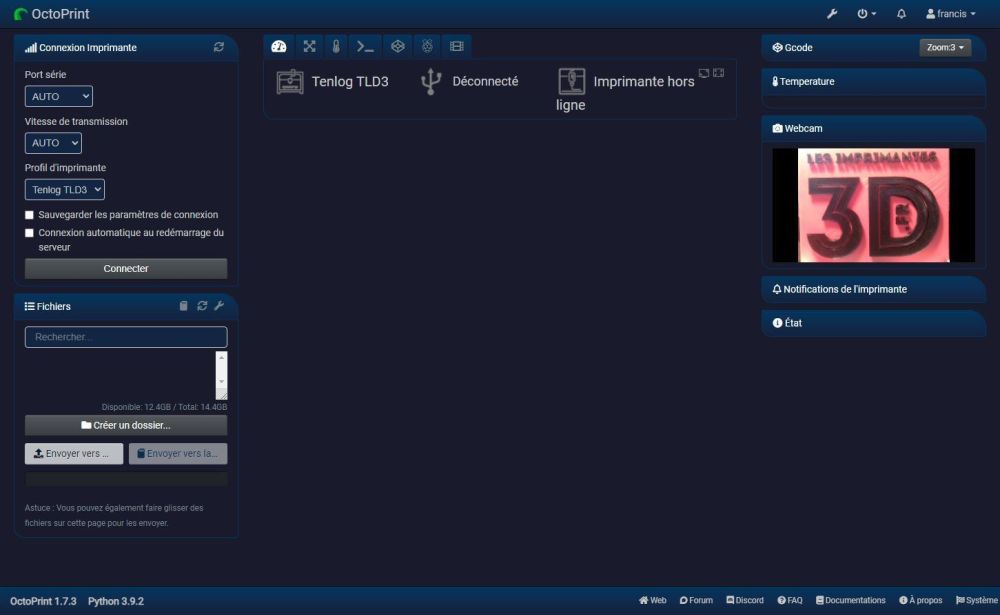
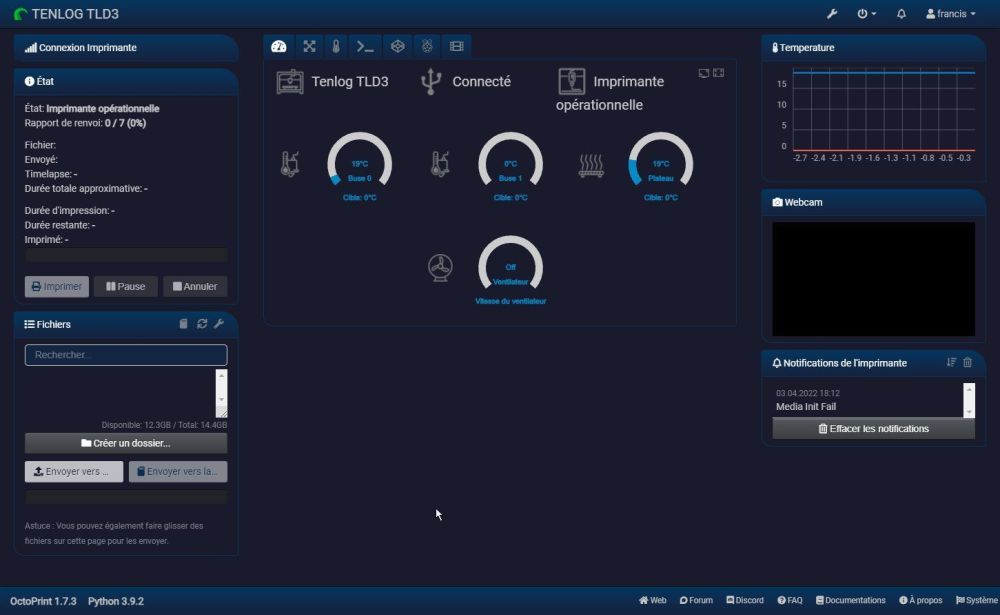
Comment installer Octoprint sur un Orange Pi Zero 2 (aka OPiz2) En préambule : Octoprint, permet : le suivi de l'impression de l'imprimante 3D (de n'importe où, sur votre smartphone par exemple), l’envoie de fichier à imprimer sans avoir à quitter votre ordinateur l’allumage/extinction de l'imprimante à distance la prévisualisation du modèle à imprimer la création de timelapses à partir de vos impressions. en option, la réception d’une alerte si l'imprimante commence à imprimer des spaghettis. Octoprint est un logiciel serveur HTTP, écrit en langage Python, censé fonctionner sur un petit ordinateur. La majorité du temps, il est installé sur un Raspberry Pi (un RPi0 v2 ou RPi3 étant le minimum requis) en téléchargeant une image pré-construite (OctoPi) ou encore manuellement via des commandes à exécuter après l’installation d’une image système minimale (Raspberry OS Lite précédemment nommée Raspbian). Cela signifie de se procurer un Raspberry Pi, un boîtier (on peut en imprimer un, ce ne sont pas les modèles qui manquent), probablement une caméra (Webcam / Raspicam) également, tout ceci, aujourd’hui n'est pas bon marché. En temps normal, il vous en coûterait environ 50€ (RPi3 ou RPi4) ou une vingtaine d’euros pour une RpiO V2 auxquels il faudrait ajouter le prix de la Webcam ou RaspiCam sans oublier une bonne alimentation 5,1V/3A. Vous n’êtes pas sans savoir ou alors vous êtes encore terré dans votre grotte depuis mars 2020 qu’une pénurie de composants affecte actuellement de nombreux secteurs. Réussir à se procurer aujourd’hui des cartes Raspberry Pi à des prix non stratosphériques relève de la gageure. Régulièrement, je consulte le site «RPiLocator» pour connaître l’état des stocks ainsi que les prix. La pénurie et/ou les prix pratiqués sont une des raisons pour laquelle on peut envisager se tourner vers d’autres cartes du même genre (OrangePi, BananaPi et autres variantes). La seconde raison, probablement la plus importante ayant conduit à la rédaction de ce tutoriel, est la conséquence d’un dépannage pour un de mes partenaires modérateurs. Grâce à lui, j’ai pu me faire la main sur une carte alternative au RaspberryPI : une OrangePI Zéro 2 C'est ce que l'on appelle une carte SBC (Single Board Computer) : - son facteur de forme est plus petit que celui d’un RPi3/4, - tout aussi rapide, - moins chère (normalement une trentaine d’euros mais plutôt autour de 35/40€ à ce jour) - et surtout actuellement disponible contrairement aux Raspberry Pi. Cette carte existe en deux versions : 512Mo / 1 Go de RAM (la différence de prix entre les deux n’est pas insurmontable). Le CPU utilisé est un Allwinner H616 (CPU ARM 64bits). ATTENTION : OrangePi fabrique de nombreuses cartes dont les noms sont parfois similaires mais dont les composants électroniques sont différents. Ne vous laissez donc pas tromper par toutes les autres cartes d'OrangePi (la Zero, la Zero+ ou encore la Zero+2). Cette carte peut fonctionner avec plusieurs systèmes d’exploitation : un fourni par le fabricant de la carte (avec interface graphique ou sans (version «serveur»)) ou avec le système Armbian (image dépouillée d’interface graphique, semblable au système Raspberry OS Lite donc) basée sur la dernière version de Debian (Bullseye). Récapitulatif du matériel : carte OrangePi Zero 2 (nommée OPiz2 dans le reste du document) alimentation 5V/2A, un câble USB-C (seules les broches 5V et de masse sont utilisées, un câble de données n’est donc pas indispensable), une carte µSD (8GB ou 16GB ou plus) optionnel, une webcam un HUB USB ou une carte additionnelle à monter sur la OPiz2 car d’origine un seul port USB est implanté sur la carte La voie avait déjà été débroussaillée par diverses lectures dont la principale, ce sujet de Blog. N’ayant pas exactement suivi ce qui y est décrit, je relate ici ce que j’ai fait pour obtenir au final quelque chose de fonctionnel. En espérant que je n’aurai rien oublié et que les étapes suivies permettront à d’autres d’obtenir le même résultat. Installation Le processus d'installation est assez simple, à condition que vous sachiez déjà comment utiliser Linux a minima. J’essaierais de détailler les différentes étapes. Préparation de la carte microSD Contrairement à votre ordinateur, cette carte ne possède pas d’équivalent d’un BIOS pour démarrer. Le système d'exploitation doit être écrit sur une carte SD. Le système démarrera et fonctionnera à partir de cette carte µSD. Une carte de 8GB ou plus est nécessaire. Plus la capacité de stockage de la carte est grande, moins elle risquera de manquer d'espace avec les mises à jour logicielles et moins elle risquera d’être endommagée par l'usure de la carte due aux écritures / réécritures sur celle-ci. En l’occurrence, la carte μSD utilisée est une Sandisk Ultra de 16Go (classe 10 / A1). Une fois la carte SD à disposition, télécharger l'image Armbian pour la carte OPiz2 à partir d'ici (le choix de votre méthode de téléchargement dépend de vos préférences (P2P ou direct)). Le «gros» bouton vert [SUPPORTED] permet de savoir que cette image fonctionne avec cette carte ;-) L’image utilisée sera celle basée sur une Debian (Bullseye), il en existe une seconde, basée sur Ubuntu (Focal) que je n’ai ni utilisée ni testée. Vous devrez ensuite décompresser ce fichier avec le logiciel de décompression 7zip (Windows) ou avec The Unarchiver (MacOS). Les deux sont gratuits, seul 7Zip a été testé car je ne possède aucun équipement de la marque à la pomme. Les utilisateurs de Linux devront installer «p7zip» (la version «terminal» de 7zip). Sur un système Debian/Ubuntu, ouvrir un terminal et saisir : sudo apt install p7zip Une fois p7zip installé, saisir dans le terminal la commande suivante pour extraire l’image : 7zr x nom-de-l-image.7z Remplacer évidemment « nom-de-l-image» par le nom de l’archive téléchargée. Une fois l'archive décompressée, vous obtiendrez un fichier d'extension .img. Celui-ci devra être gravé sur la carte SD. Flash de l’image Le logiciel BalenaEtcher sera utilisé pour cette «gravure»: choix du fichier .img sélection du lecteur de carte µSD sur votre ordinateur (bien vérifier que la taille correspond à celle de votre carte SD, ne sélectionnez pas un autre disque dur de votre ordinateur ici) gravure de l'image puis vérification (quelques minutes de patience) éjection de la carte de votre ordinateur C’est fini pour cette étape ! A noter : Premier lancement Le premier démarrage sera un peu long car le système étendra la capacité de stockage en redimensionnant la partition à la capacité maximale de celle-ci. Insérer la carte SD dans le lecteur de l’OPiz2 (emplacement sous la carte) et démarrer la carte en branchant le câble USB-C relié à l’alimentation. Un câble Ethernet doit être branché de votre routeur au port OPiz2, même si vous avez l'intention d'utiliser le Wifi par la suite. Attendez bien que la diode de la carte passe au vert (indique que le réseau est connecté: la carte a reçu une adresse IP attribuée via DHCP). Une fois fait, il faudra trouver quelle adresse IP a été attribuée par votre routeur à l'OPiz2. Plusieurs façons de découvrir cette adresse (une de celles ci-dessous devrait vous le permettre : Connexion initiale à l'OPiz2 Vous êtes désormais en possession de l'adresse IP de la carte, il faut s’y connecter en SSH. Libre à vous d’utiliser le client qui vous sied (Linux et MacOS, possèdent un client natif : il suffit de taper ssh root@192.168.1.247 (en remplaçant par l'adresse IP de la carte) dans un terminal. Sous Windows, vous pouvez (W10 / W11) également utiliser le client natif (ouvrir un terminal (Invite de commandes) puis ssh root@192.168.1.247 ) ou vous pouvez télécharger Putty et utiliser son interface graphique. A la première connexion en ssh sur la OPiz2, un message d’avertissement s’affichera. Il faudra accepter l’empreinte de la clé SHA256 avant de pouvoir poursuivre. NB : Il n'y a pas de compte par défaut autre que 'root' dans l'installation d'Armbian. Après l'installation, les utilisateurs se connectent à l'unité en tant que "root" et sont invités à changer le mot de passe root, puis à créer un nouveau compte utilisateur. Donc par défaut Armbian accepte l’usager «root» avec le mot de passe «1234». Il faut normalement procéder au changement de ce mot de passe «faible» par un plus «fort». Ce nouveau MDP doit remplir de nombreux critères avant d’être accepté (longueur, caractères autorisés, n’appartenant pas à un mot du dictionnaire, …). Ça m’a vite «énervé», en saisissant plusieurs fois le mot de passe par défaut (j'ai insisté ), j’ai tout de même accès en tant que «root» (équivalent de Dieu pour les croyants ). Pour éviter qu’à la prochaine connexion, Armbian me redemande de modifier le mot de passe, quelques commandes sont nécessaires (et suffisantes, ne pas saisir les parenthèses ni le texte contenu dans celles-ci ) : # pwd (où est-on dans l’arborescence) # ls -al (afficher le contenu du dossier, normalement /root) # rm -f .not_logged_in_yet (supprimer ce fichier sinon à la prochaine connexion, il sera demandé de modifier le mdp de root avec les critères vus plus haut) # echo -e "1234\n1234\n" | (passwd root) Le mot de passe root initial est désormais «fixé» à «1234» (vous pourrez évidemment le modifier quand vous le voudrez). Mise à jour du système d'exploitation Les premières commandes à exécuter permettent de récupérer la dernière version du système d'exploitation et de le mettre à jour. # apt update les dépôts logiciels sont consultés pour établir la liste en cours... # apt upgrade S’il y a des mises à jour, répondre oui en tapant 'y’ puis patienter le temps que les paquets soient récupérés et installés. Vous devrez exécuter cette paire de commandes de temps en temps pour maintenir votre système à jour (astuce : on peut effectuer les deux étapes avec une seule ligne en les combinant avec le double ampersand (&&) : apt update && apt upgrade). Avant de poursuivre, on va «localiser» notre système (date et heure, langue, clavier). Plusieurs manières de faire sont possibles, Armbian à l’instar de Raspberry OS, possède un outil de configuration : armbian-config à utiliser en super administrateur («root»). En ligne de commandes, on peut également utiliser les commandes Debian classiques : dpkg-reconfigure Via armbian-config (date & heure, langue, clavier) : - Personal / Time Zone - Personal / Locales - Personal / Keyboard (n’a pas fonctionné pour moi :(, j’ai dû passer par dpkg-reconfigure keyboard-configuration) Activation du WIFI Pour activer le WIFI, vous devez rejoindre un réseau WIFI. Exécuter la commande «armbian-config» pour rechercher un réseau WIFI et le rejoindre. Si cela échoue, vous devrez quitter le logiciel, taper sync et redémarrer la carte et réessayer une fois qu'elle aura redémarré. ou bien exécuter la commande nmtui-connect en tant que root pour afficher les points d’accès disponibles. Sélectionner celui auquel on souhaite se connecter, valider, saisir le mot de passe de ce point d’accès. Vérifier que le lien WIFI fonctionne en vous saisissant la commande «ifconfig» qui affichera les cartes réseau possédant une adresse IP. Celle qui nous intéresse est le lien «wlan0» Avant de débrancher le câble Ethernet, via une nouvelle instance 'ssh' se connecter à l’adresse IP «Wifi» (différente de celle en RJ45 car les adresses MAC des cartes réseau sont normalement différentes): «ssh root@ADRESSE.IP.WIFI.OPiz2» Installation d'Octoprint Pour installer Octoprint, nous devons d'abord créer un utilisateur à faible privilège, puis lui donner les droits minima requis pour exécuter Octoprint et se connecter à n'importe quel périphérique (imprimante, caméra, etc.). 1) Création de l’utilisateur «pi» : # adduser pi 2) Modifications des groupes de «pi» : # usermod -a -G video, ssh, dialout, tty, sudo pi 3) On met un mot de passe à cet utilisateur (ici = orangepi) : # passwd pi ou # echo -e "orangepi\norangepi\n" | (passwd pi) 4) Installation des paquets nécessaires : # apt install python3-pip python3-dev python3-setuptools python3-venv git libyaml-dev build-essential ffmpeg Quelques vérifications : # ls /home Le dossier «pi» doit appartenir à l'utilisateur pi et au groupe pi (pi:pi). 4) A partir de maintenant les opérations seront réalisées en tant qu’utilisateur «pi» , on bascule sur le shell de cet utilisateur : # su -u pi bash On vérifie qu’on est bien cet utilisateur : $ whoami Où est-on dans l’arborescence du système : $ pwd On doit normalement être dans le dossier personnel de «pi» : /home/pi. Si ce n’était pas le cas, se placer dans ce dossier perso : $ cd ~ ou $ cd /home/pi On est bien dans un sous-shell pour cet utilisateur pi. Il reste à installer Octoprint. La documentation écrite par @foosel (Gina Häußge, l’autrice d’Octoprint), bien que prévue pour un Raspberry, indique les étapes à suivre. 1) Création du dossier accueillant Octoprint et déplacement dans celui-ci : $ mkdir OctoPrint && cd OctoPrint 2) Passage en environnement virtuel pour Python : $ python3 -m venv venv $ source venv/bin/activate 3) Mise à jour de «pip» : $ pip install pip --upgrade 4) Installation du paquet Python «Octoprint» : $ pip install octoprint 5) Lancement du serveur : $ ./OctoPrint/venv/bin/octoprint serve Cette étape (5) est nécessaire. Un dossier caché (.octoprint) est alors créé dans /home/pi. Il contient de nombreux autres dossiers ainsi que le fichier config.yaml, tous nécessaires au bon fonctionnement d'Octoprint. [Note de foosel à propos de l’environnement virtuel : Si tout s'est bien passé lors du lancement de la dernière commande (démarrage du serveur Octoprint), vous devez vous connecter via le navigateur de votre ordinateur à l’adresse: http://adresse.ip.lan_ou_wifi.opiz2:5000 puis suivre les instructions de l'assistant de configuration de cette page pour finaliser l'installation du serveur Octoprint Hello world, premier accès : Si la page s’affiche, comme ci-dessus, tout est bon Pour arrêter le serveur d'impression Octoprint, dans la console appuyer sur Ctrl + C et ensuite Ctrl + D, pour revenir au shell de l’utilisateur «root». Quelques «améliorations» (en tant que maître des lieux soit «root») S'assurer qu'Octoprint démarre automatiquement lors du démarrage du système en ajoutant un service: On récupère sur le Github du projet Octoprint ce service et dans la foulée on le déplace à l’endroit adéquat: # wget https://github.com/OctoPrint/OctoPrint/raw/master/scripts/octoprint.service && mv octoprint.service /etc/systemd/system/octoprint.service # systemctl enable octoprint # systemctl start octoprint Vérifiez que vous pouvez à nouveau vous connecter via votre navigateur, et si cela fonctionne, c'est presque terminé ! Étapes supplémentaires pour se faciliter encore plus la vie A) Ajouter à Octoprint des «superpouvoirs» (redémarrage automatique, arrêt du système, …). Pour cela, vous devez accorder certains privilèges à l'utilisateur pi. Vous ne voulez pas accorder des droits sudo complets à cet utilisateur (si un bogue ou un exploit se produisait dans Octoprint, votre système serait en danger). La meilleure solution ici est de n'accorder à l'utilisateur pi que les commandes sudo nécessaires. Plutôt que modifier le fichier /etc/sudoers (à faire via «visudo»), on va ajouter deux fichiers dans le dossier /etc/sudoers,d/ 1) Créer un fichier /etc/sudoers.d/octoprint-shutdown (en root) avec le contenu suivant : pi ALL=NOPASSWD: /sbin/shutdown 2) Créer un fichier /etc/sudoers.d/octoprint-service (en root) avec le contenu suivant : pi ALL=NOPASSWD: /usr/sbin/service Une dernière commande concerne les droits de ces deux fichiers : # chmod 0440 /etc/sudoers.d/* B) Pouvoir utiliser une caméra En «root» : # apt install subversion libjpeg62-turbo-dev imagemagick ffmpeg libv4l-dev cmake En «pi» ( =># sudo -u pi bash) $ cd ~ $ git clone https://github.com/jacksonliam/mjpg-streamer.git $ cd mjpg-streamer/mjpg-streamer-experimental $ export LD_LIBRARY_PATH=. $ make Il ne devrait pas y avoir d’erreurs. Un test avec : $ ./mjpg_streamer -i "./input_uvc.so" -o "./output_http.so" devrait retourner quelque chose du genre : MJPG Streamer Version: svn rev: i: Using V4L2 device.: /dev/video0 i: Desired Resolution: 640 x 480 i: Frames Per Second.: 5 i: Format............: MJPEG [...] o: www-folder-path...: disabled o: HTTP TCP port.....: 8080 o: username:password.: disabled o: commands..........: enabled Si une caméra est connectée via le seul port USB, le navigateur pointé sur http://<OPiz2.IP>:8080/?action=stream devrait afficher un flux vidéo. Si c’est bon, on va automatiser le démarrage du serveur vidéo : - créer un dossier nommé «scripts» dans le home de pi : # mkdir /home/pi/scripts - créer un fichier dans /home/pi/scripts/ nommé webcamDaemon : # touch /home/pi/scripts/webcamDaemon (plus rapide) >/home/pi/scripts/webcamDaemon - éditer ce fichier via nano en recopiant le contenu suivant : - enregistrer ce fichier (CTRL+X en répondant Oui ( ou CTRL+O pour enregistrer puis CTRL+X pour Quitter nano) ), - rendre ce fichier exécutable et faire que 'pi' en soit "propriétaire" via : chmod +x /home/pi/scripts/webcamDaemon && chown -R pi:pi /home/pi/scripts - créer un fichier dans /etc/systemd/system/, nommé webcamd.service (nano /etc/systemd/system/webcamd.service) avec le contenu suivant : - Recharger les services puis activer et démarrer ce nouveau service :: # systemctl daemon-reload # systemctl enable webcamd # systemctl start webcamd Pour pouvoir arrêter / démarrer ce service via Octoprint, il faut ajouter la section suivante dans le fichier config,yaml (dans le dossier caché ,octoprint => /home/pi/.octoprint/config.yaml) Rendre Octoprint accessible via le port 80 au lieu de 5000 Le mieux est d’utiliser «haproxy» en tant que proxy inverse plutôt que configurer Octoprint tournant sur le port 80 (serveur Web). Pourquoi ? - installer haproxy : # apt install haproxy - modifier le fichier de configuration /etc/haproxy/haproxy.cfg avec le contenu suivant :: Ainsi, Octoprint sera accessible via http://<Opiz2.IP>/ et le flux de la Webcam sera accessible via http://<Opiz2.IP>/webcam/ Pour que tout fonctionne, il faudra modifier le fichier /etc/default/haproxy en ajoutant la ligne ENABLED=1 (ne semble plus une étape nécessaire) - activer puis lancer le service haproxy : # systemctl enable haproxy # systemctl start haproxy Il ne restera plus qu'à ajouter dans la configuration d’Octoprint les chemins d’accès dans la section «Caméra et Timelapses» (pour le flux : /webcam/?action=stream , pour les clichés : http://127.0.0.1:8080/?action=snapshot ). Dernières «améliorations» non indispensables mais probablement pratiques La carte OPiz2 comme d’autres cartes d’OrangePi, possède un connecteur GPIO (deux en fait). Armbian gère un peu différemment ces broches par rapport au Raspberry Pi. Avec «Raspbian», les fichiers /dev/gpiochip0 (ou 1) appartiennent à root et au groupe gpio et ont pour droits crw-rw----- (0660) Avec «Armbian», les fichiers /dev/gpiochip0 (ou 1) appartiennent à root et au groupe root et ont pour droits crw-------- (0600) Pour fixer ceci et permettre qu’un éventuel greffon Octoprint utilisant les gpio fonctionne, il faut effectuer quelques modifications : - créer un groupe gpio et ajouter l’utilisateur pi à celui-ci : # groupadd gpio # usermod -aG gpio pi - vérifier que le groupe a bien été créé ainsi que ses membres : # getent group | grep gpio - créer des régles UDEV avec les bonnes «ACLSs» : # >/etc/udev/rules.d/96-gpio.rules (ou) # touch /etc/udev/rules.d/96-gpio.rules - ajouter le contenu suivant via # nano /etc/udev/rules,d/96-gpio.rules - sauvegarder le fichier précédent, et recharger ces règles UDEV : # udevadm control –reload-rules && udevadm -trigger Si tout s’est bien déroulé, les droits et appartenances des périphériques «gpio» devraient être identiques à ceux d’un Raspberry : pi@armbian:~$ ls -l /dev/gpiochip* crw-rw---- 1 root gpio 254, 0 Dec 28 19:16 /dev/gpiochip0 crw-rw---- 1 root gpio 254, 1 Dec 28 19:16 /dev/gpiochip1 Les greffons Octoprint faisant appel aux gpios devraient fonctionner à condition d’utiliser les bonnes déclarations (différents d’un Rpi ;-) ), à vérifier sur le site du fabricant en fonction du modèle. Diagramme des broches (pins) de l’OPiz2 : Dernière «amélioration», permettre l’accès au contenu du dossier «pi» à partir d’un ordinateur du réseau Cela n’a rien d’obligatoire mais c’est bien pratique. Pouvoir accéder au contenu du dossier «pi» via le protocole SAMBA, en tapant l’adresse IP de la carte dans l’explorateur (ex : \\192.168.1.247). Pour cela, il faut ajouter quelques logiciels : # apt install samba cifs-utils smbclient Ensuite modifier le fichier /etc/samba/smb.conf : # nano /etc/samba/smb.conf en ajoutant en fin de fichier : Pour prendre en compte ces modifications : # systemctl reload smbd # systemctl status smbd Ne pas oublier d’ajouter l’utilisateur «pi» à Samba en lui mettant un mot de passe («orangepi» identique à celui fixé précédemment mais il pourrait être différent, Windows le demandera à la première connexion sur le partage) : smbpasswd -a pi (ou "echo -e "orangepi\norangepi\n" | (smbpasswd pi)" ) CONCLUSION Une fois toutes ces étapes réalisées, Octoprint est pleinement fonctionnel, en tout cas pour moi. L’ajout de quelques greffons permet d’améliorer l’affichage : Une fois l’imprimante connectée en USB sur la carte OPiz2 (à noter que la Webcam ne s’affiche plus car je n’ai pas le Hat USB donc c’est comme au restaurant «fromage ou dessert» (le OU exclusif pour les amateurs de mathématiques)) : Les greffons ajoutés sont UI customizer, Dashboard, Resource Monitor, Auto Login Config, Multiple Upload. En espérant que ce document pourra être utile à ceux voulant se lancer avec cette carte Orange Pi Zéro 2 <EDIT> J'ai oublié de parler de la sauvegarde de la carte SD, une fois tout paramétré et fonctionnel. Comme sur la plupart de mes matériels informatiques, je fais régulièrement des sauvegardes (pour le cas où ). Pour réaliser des copies du contenu de mes cartes SD (ou clé USB ou disques durs éventuellement), j'utilise avec Windows le programme ImageUSB (lien vers l'éditeur officiel). L'avantage de ce programme est de ne pas avoir besoin d'être installé sur le matériel d'où l'on effectue la copie ( plus d'infos => ici , là et encore là ). Une fois la copie de l'image de la carte faite, un coup de 7zip (extension .7z) permet de réduire drastiquement la taille initiale de l'image (= taille de la carte SD) sans évidemment perte de données ) J'ai donc une copie (en fait plusieurs en fonction des étapes de configuration du système) qui sont toutes de moins d'un giga octets avec ma carte SD de 16Go (taille de fichier trop importante pour les capacités du forum mais que je pourrais éventuellement mettre à disposition via un lien de partage de fichiers). D'ici quelques temps, je mettrai à disposition quelques scripts permettant d'accélérer les étapes de création du système (n'ayant plus la carte OrangePi Zero 2, retournée chez son propriétaire, la mienne devrait arriver d'ici quelques semaines pour tester et vérifier le bon fonctionnement des scripts d'installation). L'installation via des scripts, c'est >>> ici <<<




 3 points
3 points -
Un peu gros le benchy3 points
-
Après réflexions: En impression 3D, un excentrique n'est pas seulement une pièce mais aussi une personne qui pose des questions sur ce forum. La preuve. Allez je
 3 points
3 points -
Gros zizi ? Je suis outré !2 points
-
C'est prévu J'étais dans l'urgence pour finir d'écrire la procédure et j'ai oublié tout à la fin de parler de la sauvegarde de la carte SD, une fois «préparée» ( j'utilise le logiciel imageusb utilisé comme outil «forensics» pour réaliser une copie à l'identique du support (j'ai plusieurs images de l'OPiz2 mais mêmes compressées elles avoisinent le giga octet). Le sujet sera donc complété2 points
-
Il faut bien remarquer que le cache CGLA c'est un espace de stockage des résultat des calculs des objets intermédiaire. ( en gros le même principe qu'un cache de navigateur web pour éviter de re télécharger une image qu'on a déjà téléchargé, sauf que là c'est pour des résultats de calcul et non pour le contenu d'une URL ) Donc cela permet un rendu plus rapide seulement si un objet existe déjà dans le cache ( on ne refait pas le calcul de cet objet). Mais lors du 1er rendu ( ou si le cache a était vidé ou si il n'y avais pas assez d'espace dans le cache et que se rendue intermédiaire a était supprimé pour faire de la place) là ce en sera éventuellement que pour le rendu suivant que cela va faire gagner du temps. Et il doit donc exister des stratégies de codage a utiliser pour tirer avantage du cache. ( surement du genre bien structurer/découper le code en modules ... )2 points
-
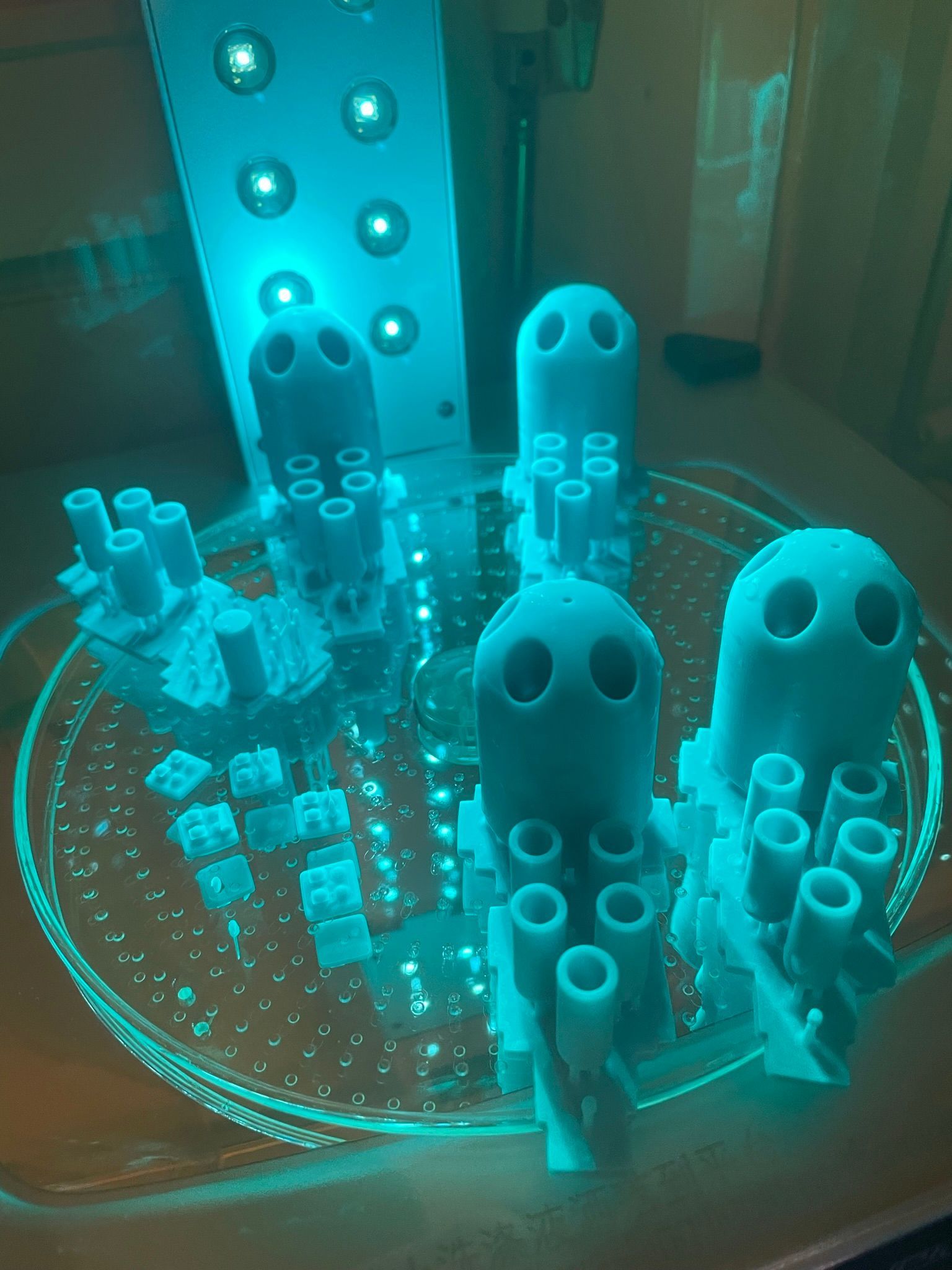
Mentionné plus haut par notre ami @PPAC, il faut mettre des supports.2 points
-
Anker s'attaque au segment de l'impression 3D grand public avec l'imprimante 3D AnkerMake M5 qui a de quoi séduire (et a séduit Kickstarter sans aucun mal ) ! https://www.lesimprimantes3d.fr/ankermake-m5-kickstarter-20220407/1 point
-
Gros big up à @Nos68 pour avoir osé le face caméra afin de faire un test complet sur la grande imprimante 3D Kobra Max ! https://www.lesimprimantes3d.fr/test-anycubic-kobra-max-20220406/1 point
-
 C'est une ender 3 ? (notes le dans ton profil) Est-elle de base ou tu as fait des changements ? As-tu fais tous les réglages de base (mécanique pour l'équerrage, les step extrudeur, le réglage buse/bed et comment tu l'as fait, nettoyage du bed et comment tu procèdes, vérification des excentriques, la tige filetée bien en contact avec la tige moteur et coupleur bien serré, etc...) Pourquoi il y'a cette gaine qui passe devant ? prends nous des photos de l'ensemble de ta machine qu'on voit le montage Transmets nous un STL qui ne fonctionne pas. Enfin je te conseille de te pencher sur la version de cura et non celle que tu utilises de creality (c'est un cura allégé). Et dans le même temps il faudrait que l'on les paramètres de ton profil cura voir si il est adapté a ta machine, il y'a un plugin a installer (si dispo sur celui de creality), export html. Ensuite il te suffit de nous transmettre le fichier html que l'on voit tout. Ca fait beaucoup mais c'est la base avant de commencer (ce n'est pas une simple imprimante papier )et il y'a pleins de bon tutos section creality du forum qui pourront t'aider te te guider.1 point
C'est une ender 3 ? (notes le dans ton profil) Est-elle de base ou tu as fait des changements ? As-tu fais tous les réglages de base (mécanique pour l'équerrage, les step extrudeur, le réglage buse/bed et comment tu l'as fait, nettoyage du bed et comment tu procèdes, vérification des excentriques, la tige filetée bien en contact avec la tige moteur et coupleur bien serré, etc...) Pourquoi il y'a cette gaine qui passe devant ? prends nous des photos de l'ensemble de ta machine qu'on voit le montage Transmets nous un STL qui ne fonctionne pas. Enfin je te conseille de te pencher sur la version de cura et non celle que tu utilises de creality (c'est un cura allégé). Et dans le même temps il faudrait que l'on les paramètres de ton profil cura voir si il est adapté a ta machine, il y'a un plugin a installer (si dispo sur celui de creality), export html. Ensuite il te suffit de nous transmettre le fichier html que l'on voit tout. Ca fait beaucoup mais c'est la base avant de commencer (ce n'est pas une simple imprimante papier )et il y'a pleins de bon tutos section creality du forum qui pourront t'aider te te guider.1 point -
Toujours avoir 2 ou 3 slicers ainsi par moment tu te rendras compte que l'un est mieux pour certaines fonctions et/ou pièces1 point
-
ça sort plutôt bien, alors je dois encore peaufiner les réglages, mais ça avance.

 1 point
1 point -
Waouh ! beau travail ! Merci ! Je me dis que faire un ou plusieurs scripts pour automatiser tout ça ne va pas être simple... il semble donc indispensable de ne pas oublier de faire une copie de sauvegarde de la carte SD lorsque tout fonctionne.1 point
-
C est encore plus flagrant comme ça Ce qui m'ennuie c'est que j'ai beau changer les paramètres un par un et rien ne change, toujours ces déplacements parasites, je vais tester sur PrusaSilcer ou cura, je me demande si ce n'est pas un bug d'idéamaker, j'ai déjà eu des mauvaises surprises sur de très gros fichier.... j'ai tester avec PrusaSlicer avec les paramètres par défaut et c'est parfait ! et je n'arrive pas à supprimer ces déplacements parasite sur ideamaker ! Je pense que je vais tester PS car il a l'air bien plus rapide et moins gourmand que ideamaker, merci pour m'avoir aidé et permis d'avoir une autre approche.1 point
-
Je ne doute pas que la future PrusaXL sera une bonne machine (en tout cas sur le papier elle le semble) mais pour le moment elle n'est pas encore disponible que ce soit avec deux ou jusqu'à cinq têtes Les imprimantes que je possède (majoritairement des Creality) à l'instar de tes MK3S ne m'ont pas non plus causées de grands soucis de maintenance, toutefois elles ne tournent pas toutes 24/7/365 (366 si bisextile ). Un parc de modèles reconnus (des Prusa par exemple) comme le dit @Kachidoki me semble préférable à une imprimante «pro» pour les raisons qu'il a listées. @divers pourraient éventuellement intervenir car il me semble qu'il a un parc de Prusa dans son entreprise. Il serait plus à même de causer de maintenance et contrats associés que moi qui ne reste qu'un amateur.1 point
-
J'ai trouvé les explication sur l'anti aliasing, je ne doute pas que certains entre vous connaissez ce line, mais bon je découvre. https://www.chitubox.com/en/article/support/indepth/technology/521 point
-
Pour le plateau en verre tu as ces pinces là par exemple. (OK sur ender3 v2) https://www.amazon.fr/pinces-fixation-originales-Creality-imprimante/dp/B08PZKGJTR/ref=sr_1_17?__mk_fr_FR=ÅMÅŽÕÑ&crid=7T9OAB4KHG5N&keywords=pince+clip+plateau+imprimante+3d&qid=1649337604&sprefix=pince+clip+plateau+imprimante+3d%2Caps%2C60&sr=8-17
 1 point
1 point -
Si ça ce n'est pas un argumentaire en bouts de ficelles... (Je cherche encore les tringles à rideaux)1 point
-
Salut, Ca va dépendre de plein de facteurs. La fréquence de la maintenance c'est surtout une combinaison entre la qualité des pièces et l'intensité d'utilisation. Une machine avec des roulements de qualité (et donc bien souvent, plus chère), tiendra plus longtemps à forte charge qu'une machine avec des roulements en plastique, alors que cette dernière suffit parfaitement bien à l'utilisateur occasionnel. Une machine dont le constructeur teste chaque élément jusqu'à la rupture, et vérifie en laboratoire ce qu'il se passe, proposera forcément une machine plus robuste (et donc avec moins de maintenance) que le concurrent moins cher qui mise tout sur le marché de masse et les économies d'échelle. A mon taf on a des imprimantes a +100k€ avec contrat de maintenance sur site. Ce sont des machines pro de très haut niveau de qualité, mais qui tournent 24/7, donc forcément de temps en temps il arrive que la machine soit en rade, c'est statistique. Mais il est déjà arrivé que ça le soit pendant un mois car une pièce manque en stock. A ce moment le plus souvent je reçois quelques requêtes de dépannage d'impression dans ma boite mail quand ça devient urgent. Déjà que quand elle fonctionne, la file d'attente pour avoir une pièce est de plusieurs jours à plusieurs semaines... Avec le même budget, mais une gestion différente, par exemple un gars dédié à la gestion du parc machines, on pourrait avoir une ferme avec des dizaines d'imprimantes. Quand y'en a une en rade et que c'est trop chiant à réparer, hop on la remplace comme du consommable. Une Prusa i3 MK3S+ livrée avec 1kg de filament coûte le prix de deux bobines (~3kg) de la machine pro actuelle... Pour une petite boite c'est forcément un budget différent, mais passé 3 ou 4 machines, ça devient moins critique d'en avoir une en panne. Je préfère dans ce cas privilégier la continuité de service et pour 3000€, avoir sept Prusa MINI+ ou quatre Prusa i3 MK3S+ qu'une seule Ultimaker S2+... Pour la S3 c'est un peu différent car double extrusion, mais pour presque le double du tarif de sa concurrente, la Prusa XL avec 2 têtes et 1000€ de plus que la version à 5 têtes. Les deux se situant clairement sur le même segment de marché, Ultimaker a du souci à se faire. En parlant de Prusa, j'en possède ou possédais plusieurs depuis 2017. Côté pannes, j'ai remplacé un ventilo bruyant par prévention, et j'ai changé une sonde capacitive HS. Un petit message au SAV par tchat le dimanche, pièce livrée en 48h par DHL.1 point
-
Salut @Al3an, D'après ce sujet reddit, il faudrait prendre une ancienne version du firmware. Il faut bien faire attention à la version, si tu utilises un adaptateur ou pas. Il me semble que le buzzer est indisponible si tu utilises l'adaptateur. Si tu ne trouves pas de firmware qui correspond, on devrait pouvoir t'en compiler un, il suffit d'avoir des infos sur ton câblage de Bltouch. Dans un premier temps, je débrancherais le BLtouch qui pourrait faire un court-circuit (même si dans ce cas, l'écran ne devrait pas fonctionner). Certains fournisseurs rigolos aiment bien mélanger les couleurs des fils... Si le buzzer est connecté à la carte mère et que tu ne vois pas de fumée s'échapper de l'imprimante , tu pourrais le déconnecter temporairement, au moins pour le bien de tes voisins ... En ce qui concerne les Gcodes: - M502: charge les paramètres du firmware (comme les pas/mm des moteurs,...) - M500: sauvegarde ces valeurs dans la mémoire - M501: charge les paramètres de la mémoire (ce qui est conseillé de faire après les M502 et M501) pour info M503 afficher les paramètres, ce qui est intéressant, si ce n'est pour toi, pour nous au moins . En ce qui concerne le chargement du firmware, il faut absolument que le nom soit différent du précédent (tu peux ajouter un indice à la fin, avant le .bin, bien sûr ). Ensuite, l'impossibilité de charger le firmware peut venir d'une carte µSD défectueuse, ce qui arrive dans 200% des cas avec la carte fournie avec l'imprimante. Une carte de marque / de qualité de 32Go maxi devrait fonctionner.1 point
-
On pourrait demander à un Admin de créer un "badge" spécial à rajouter dans son profil1 point
-
bonjour, c'est clair si elle est aussi bien que la SR mais en plus grande je prend1 point
-
Salut @visiteur57, Soit tu confonds le scipt de fin d'impression (qui va arreter le chauffage tete et bed et deplacer la tete) avec le process dont je te parlais, soit j'ai pas compris ta demande. Pour moi cela correspond a la fonction ironing disponible sous Cura. Peux-tu confirmer que c'est ce que tu cherches a faire avec S3D? Cdt SoM1 point
-
Si c'est vraiment un plateau de Ø400 Et si le prix n'est pas stratospherique....... Alors c'est certain, elle va intégrer ma petite ferme.1 point
-
Wait and see... C'est ma femme qui va encore raler quand le monstre fera son apparition à la maison...1 point
-
superbe @Nos68 pour la présentation technique bravo pour les photos et les détails bien expliqués. a+1 point
-
Super, j'ai réussi, merci beaucoup1 point
-
En effet dans les pistes possibles la cle usb ou carte SD qui pose soucis, un soucis de détecteur de fin de filament pourrait aussi entré en cause, dernier point en effet un soucis avec un firmware custom. ce que tu indique plus haut est la version du firmware d'écran pour savoir si tu es sur un firmware custom il faudrait passer par une consol pronterface par exemple.1 point
-
Salutation par excentrique ici on parle d'un "écrou excentrique" qui a la particularité d'avoir un trou désaxé (excentré)...1 point
-
Alors, ce que tu appelles le "support du ventilateur" c'est ... la tête d'impression et effectivement elle bouge beaucoup. Tu peux régler la roulette du bas à l'aide de l'excentrique pour coller la roue au profilé : les roues ne doivent pas pouvoir tourner à la main sans forcer. Et il ne faut aucun jeu sur cette partie de l'imprimante.1 point
-
Salut, Tu peux faire un "ironing" sous S3D mais c'est plus complique. Tu dois creer un nouveau process qui couvre les derniers 0.1mm ou moins de ta piece. Le parametrer pour faire une couche de 0.1mm ou 0.05 et diminuer le debit drastiquement. Tu peux essayer en montant la temperature de la tete egalement. J'avoue avoir la flemme de changer de slicer mais un jour ou l'autre il va falloir y passer. Cdt SoM1 point
-
Bonnes nouvelles ( il faudrait juste qu'ils fassent appel à un correcteur pour un message aussi important )
 1 point
1 point -
Cool ! la reprise ... https://www.arianeplast.com/ ( 02/04/2022 ) pour le moment il ne semble y avoir que le PETG argent en 1kg 1.75 mm de disponible mais pour moi, la réouverture des commandes en ligne c'est bon signe !
 1 point
1 point -
Je n'ai pas pour habitude de faire la promo de la "concurrence" mais ce foirium n'est pas spécialisé dans Fusion360 Si vous n'êtes pas allergiques à Facebook je vous recommande les tutos de John Frogg en PDF Voir ici >>> La page de Bernard Grosperrin, "Le Bear" Voir là >>> Ainsi que les vidéos Youtube de Creadin Voir ailleurs >>>1 point
-

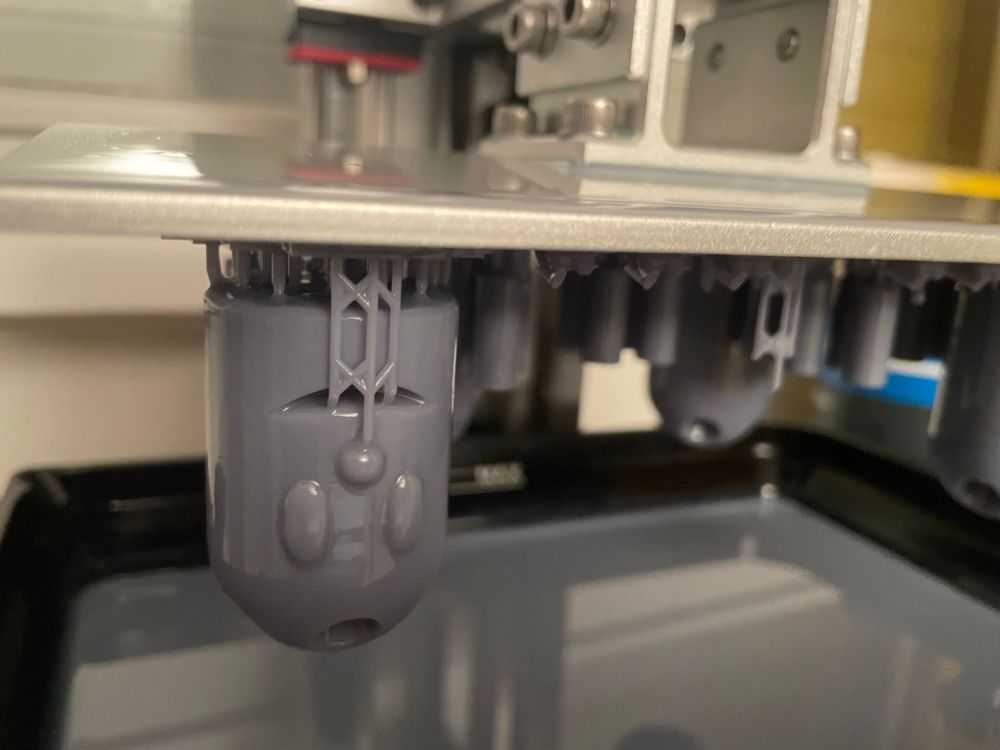
From the album: J'apprends
Voir image précédente. Sur celle-ci on voit l'aspect "glossy" dû à l'impression à l'envers sur plaque de verre, parfait pour un panneau d'affichage.1 point