Classement




Contenu populaire
Contenu avec la plus haute réputation dans 31/10/2022 Dans tous les contenus
-
C’est avec beaucoup d’émotion et sûrement des regrets à venir que j'ai du prendre cette décision.... L'impression 3d bouffe tout mon temps et je ne sais même plus m’occuper des plus simples tâches ménagères.... J’ai donc décidé de vendre tout mon matériel dont vous trouverez la liste ci-après, les photos sont disponibles en mp sur demande Liste de matos 1 balai swiffer 1 seau 1 serpillière 1 raclette 1 fer a repasser et sa table. Divers produits d’entretien ( mr Propre, Dettol, etc)11 points
-
Faute d'avoir eu le temps de faire une nouvelle déco j'ai recyclée celle que j'avais fait au boulot.




 5 points
5 points -
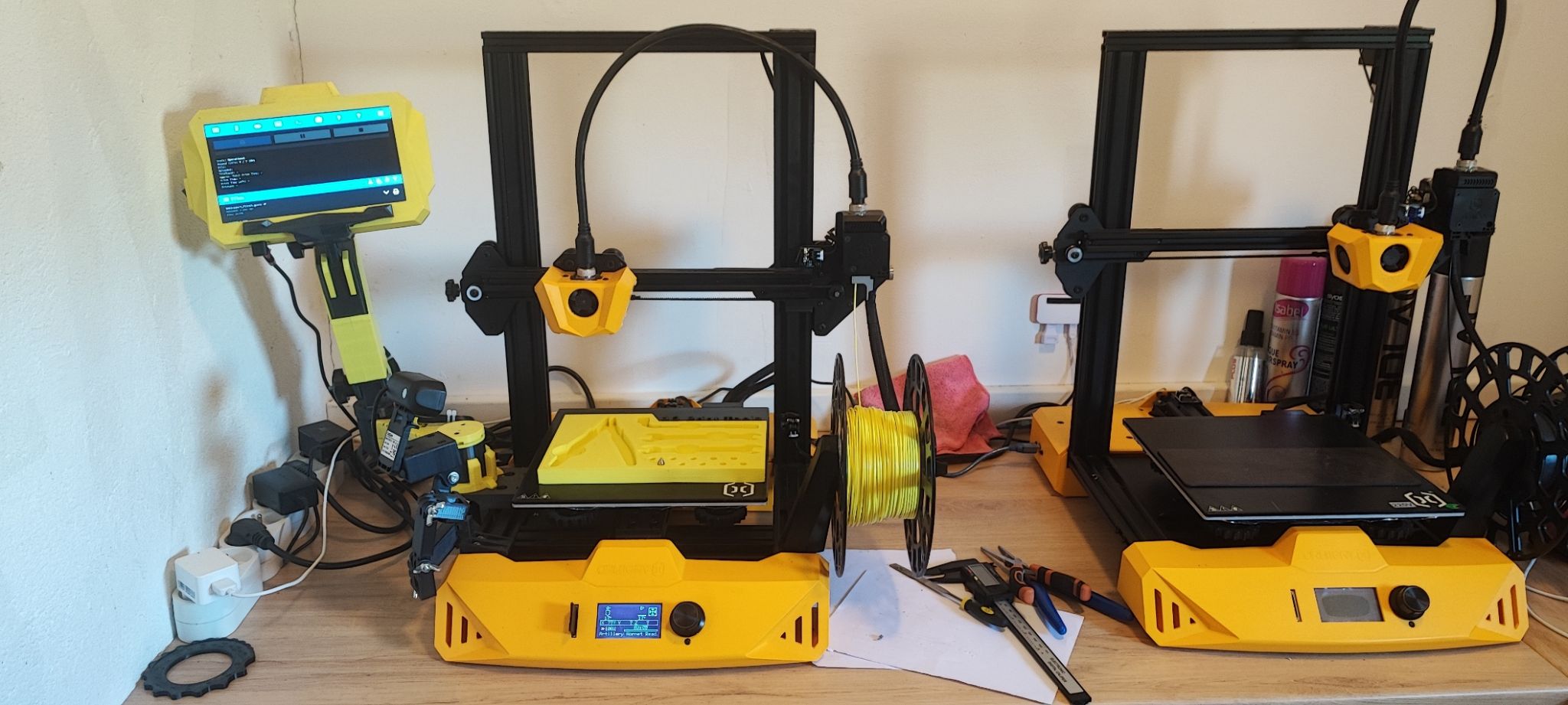
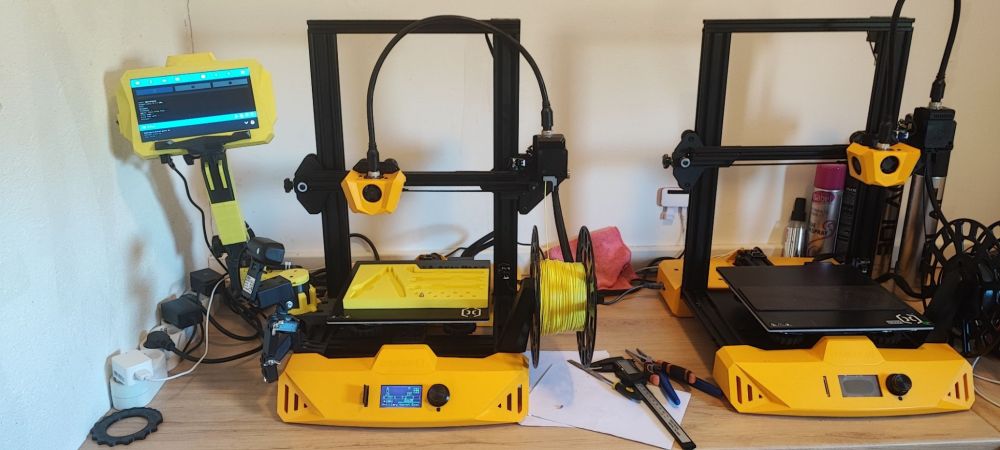
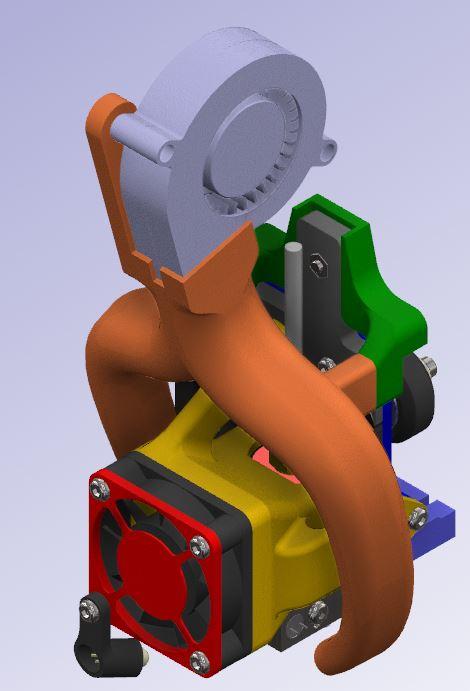
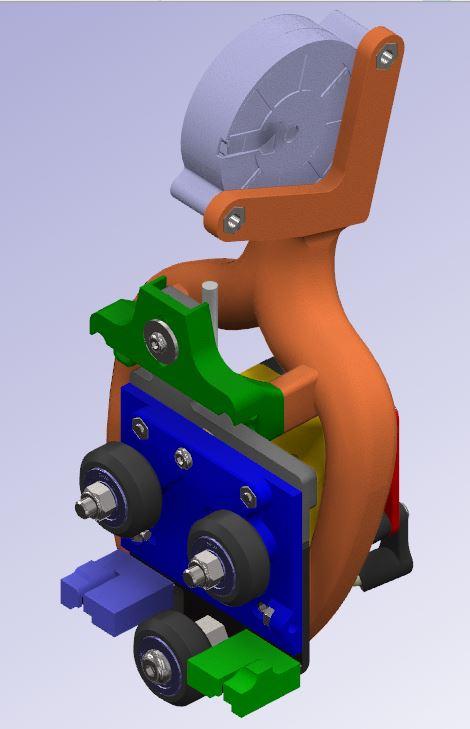
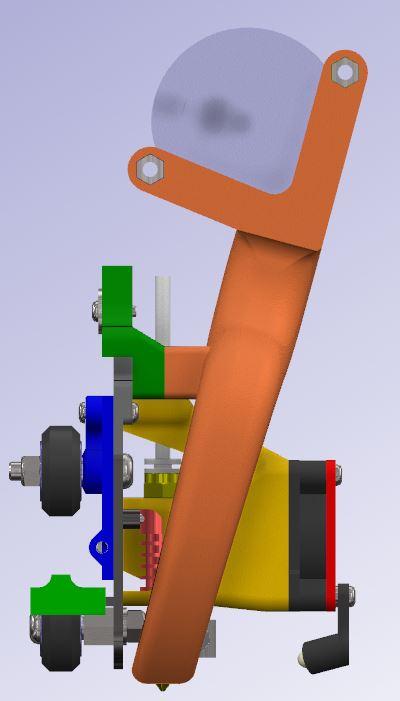
Salut à tous, Cela fait très longtemps que je ne suis plus sur le forum, après une longue absence je reviens avec un projet que je viens de finir. Le projet est un bras pour un écran tactile 7" avec Octoprint d'installé. J'ai essayé de rester dans le même design que l'imprimante. J'ai aujourd'hui deux Imprimantes Artillery Hornet dont une tourne avec Marlin et Octoprint. Quant à la seconde on va refaire le même bras avec un autre écran tactile mais malheureusement vue le prix des raspberry actuellement, on va patienter. En attendant j'ai installer Klipper avec un raspberry zéro, ca tourne mais j'ai encore des réglages à faire et suis loin de maitriser encore la chose.

 4 points
4 points -
reste encore l'éclairage à mettre.
 4 points
4 points -
Bonjour à tous, Pour ceux qui seraient intéressés de voir le dispositif en action ainsi que les étapes de conception/réalisation, j'ai fait une vidéo complète sur le sujet : Et puis comme promis tous les stl sont sur thingiverse: https://www.thingiverse.com/thing:5598067 A+ pour la suite du projet !4 points
-
Salutation ! Il manque le prix et sans photos dans l'annonce pour voir l’état ... Tu vas surement les garder sur les bras ... Envoi possible ? ( Avec d'avance mes excuses auprès des administrateurs, autre modérateur et utilisateurs du forum. J'ai accepté cette "fausse annonce" car elle m'a fait rire )4 points
-
Bon j'ai revu ma copie, je vais passer en direct, effectivement pas très concluant, ça fonctionne mais compliqué toute cette mécanique supplémentaire. j'ai redessiné mes pièces.
 2 points
2 points -
Salutation ! Je vais donc aller masquer ton ancienne annonce. Bonne vente.2 points
-
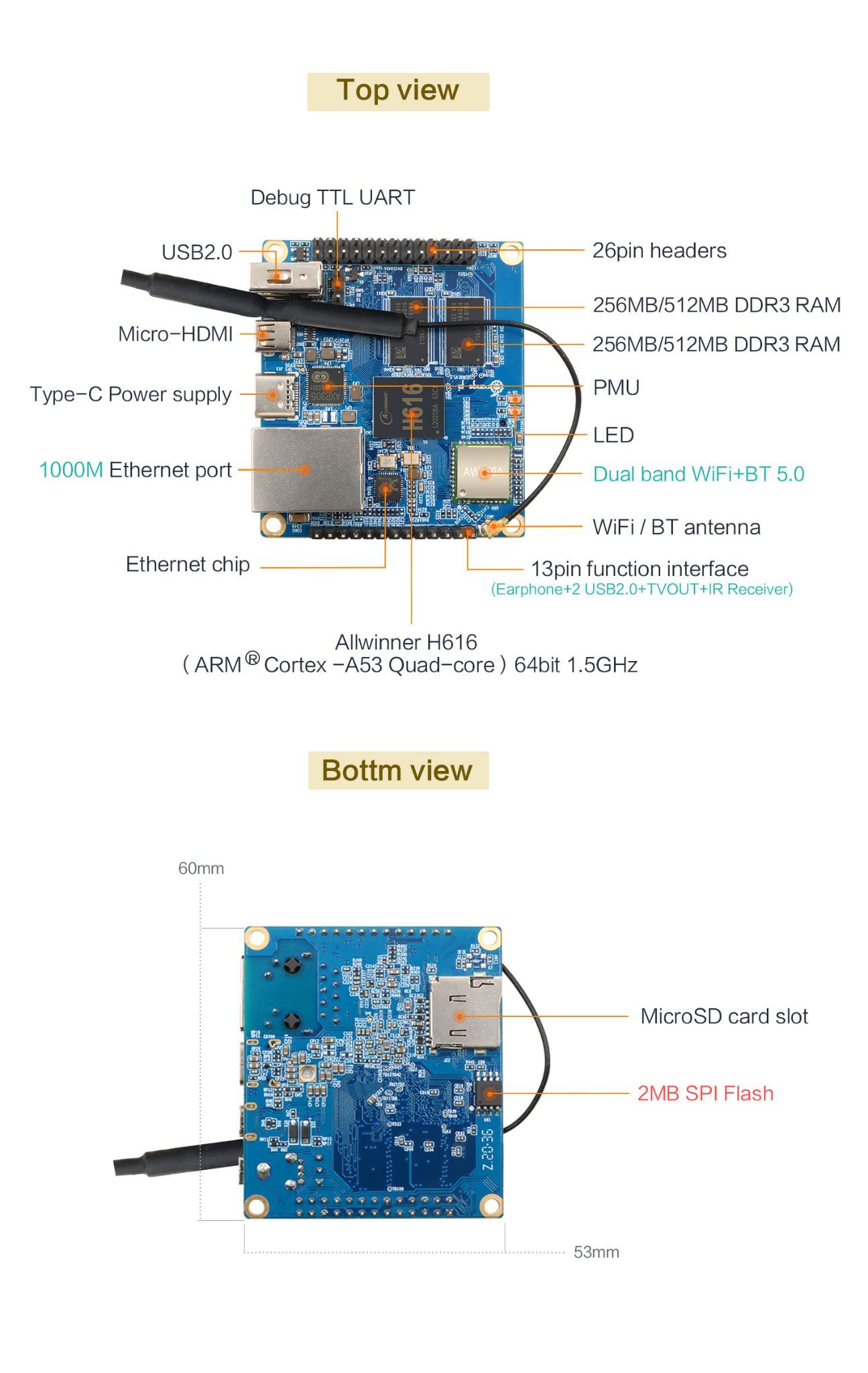
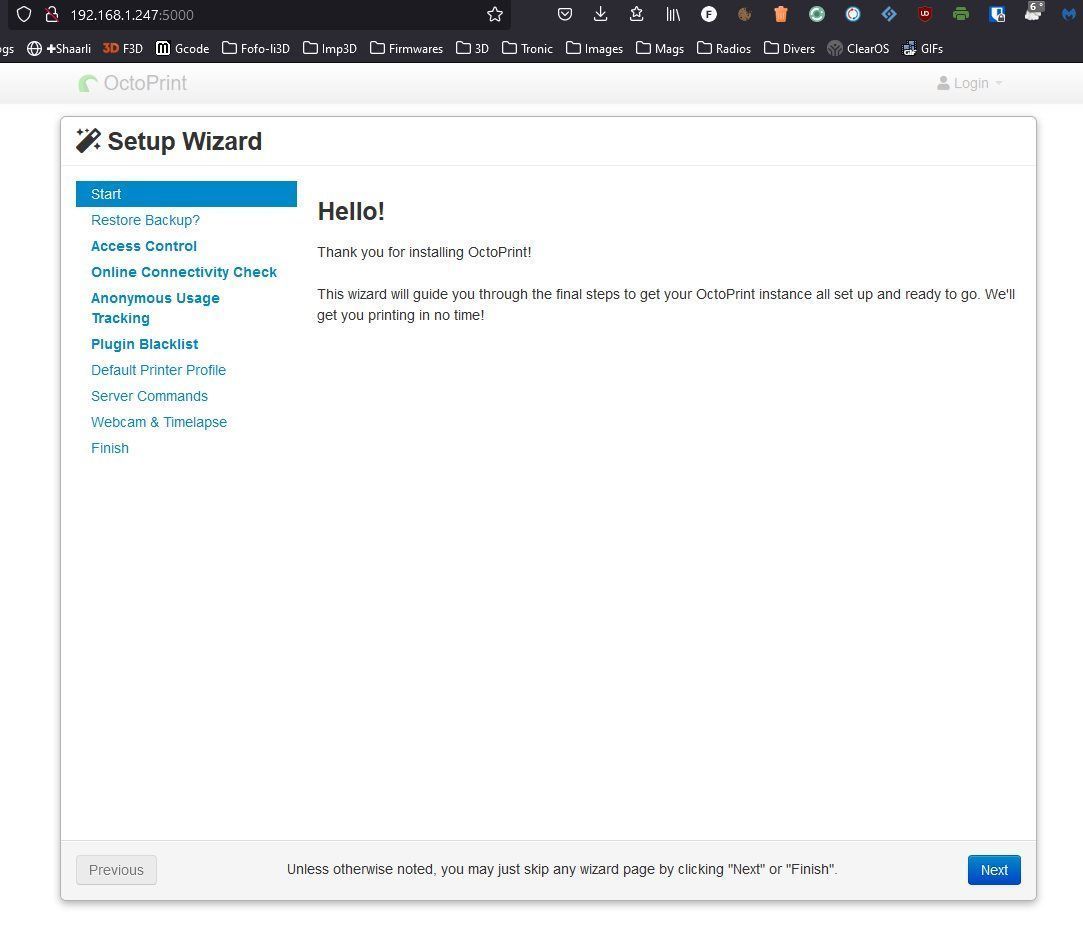
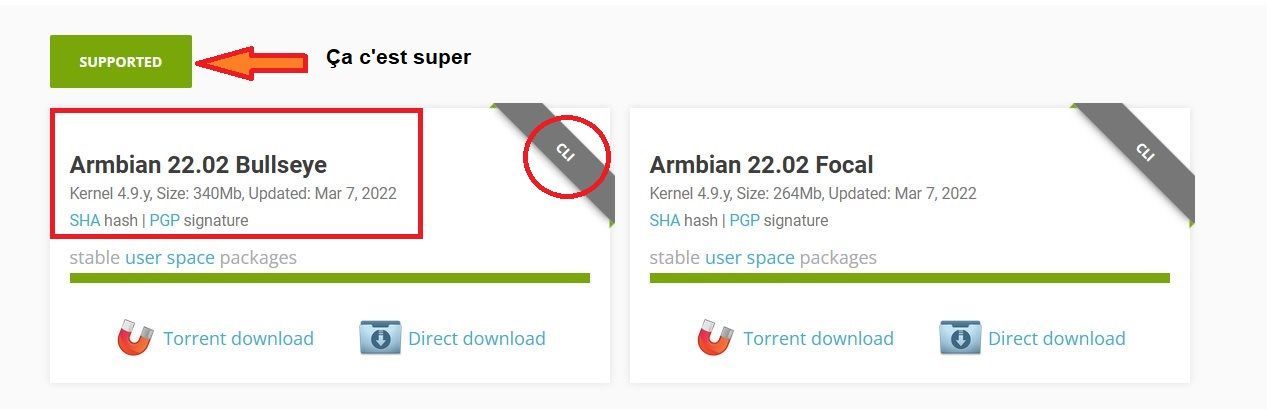
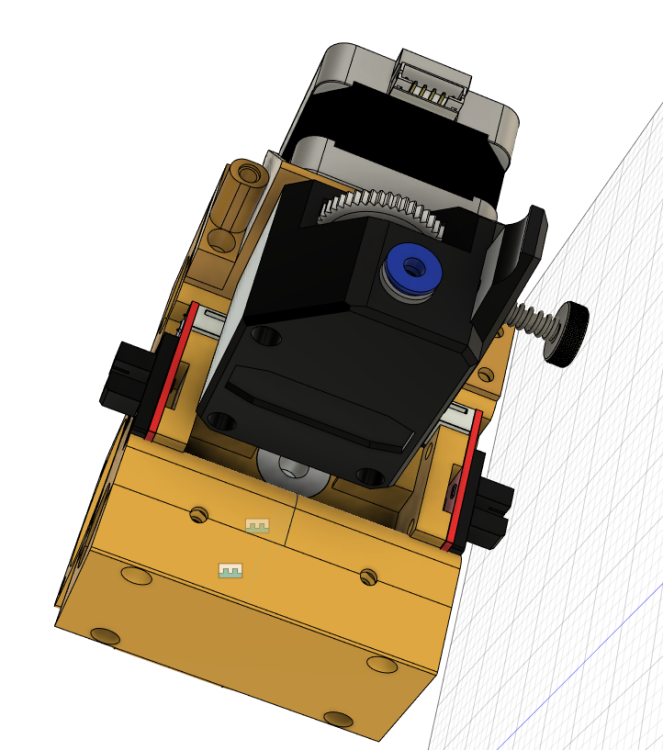
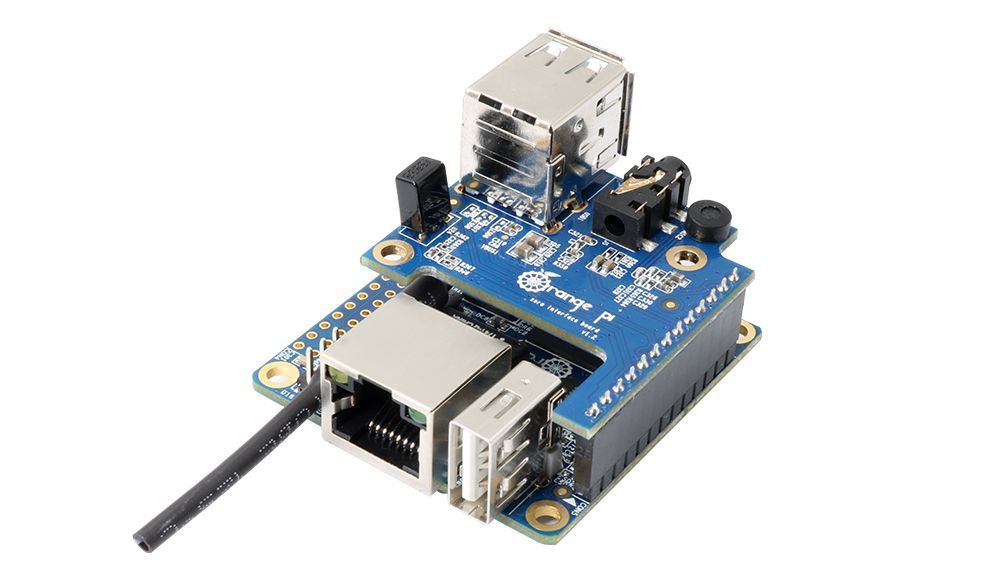
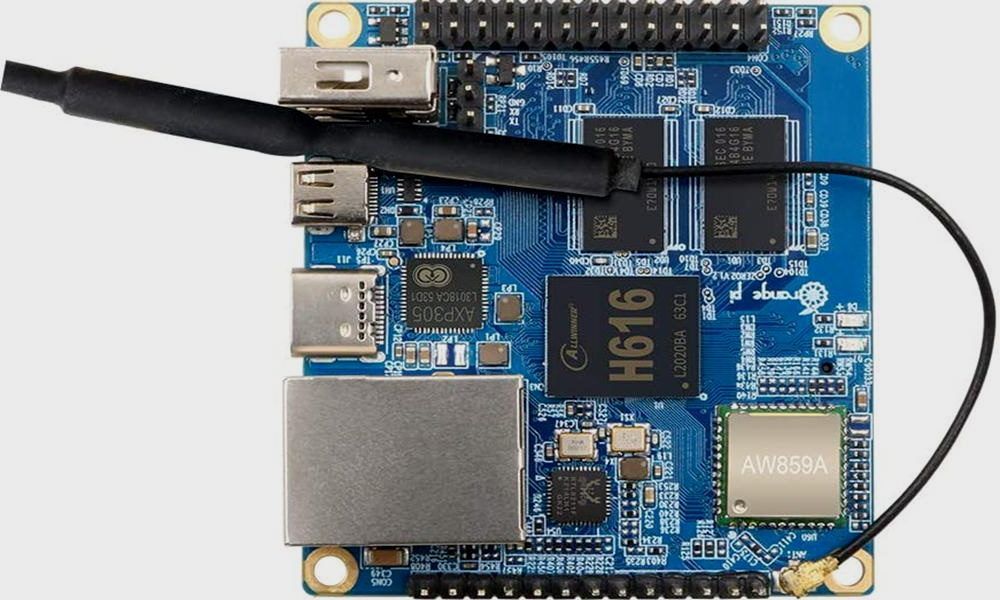
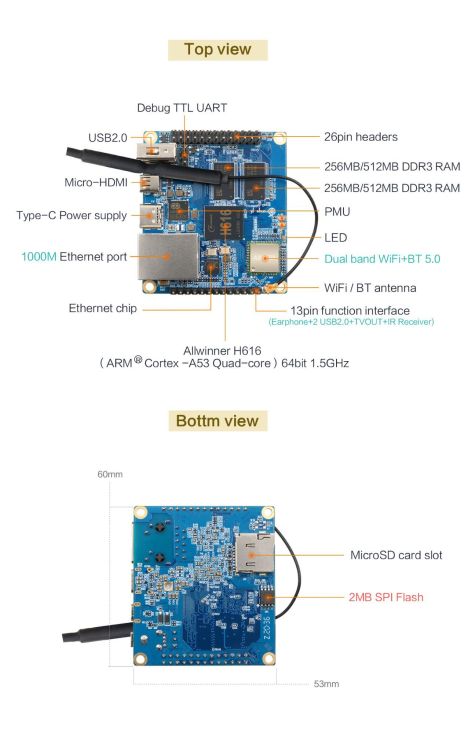
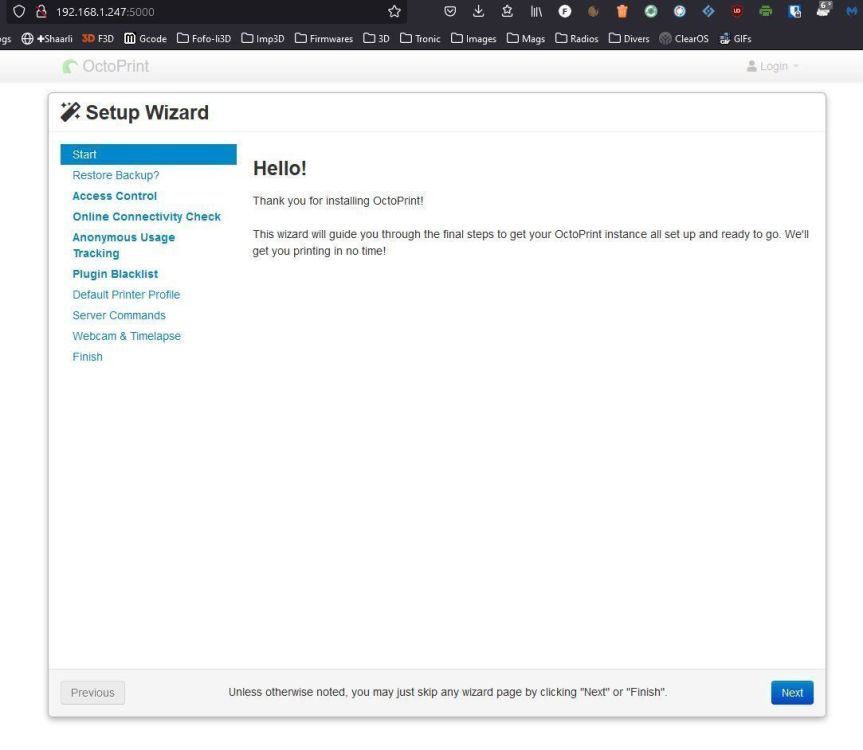
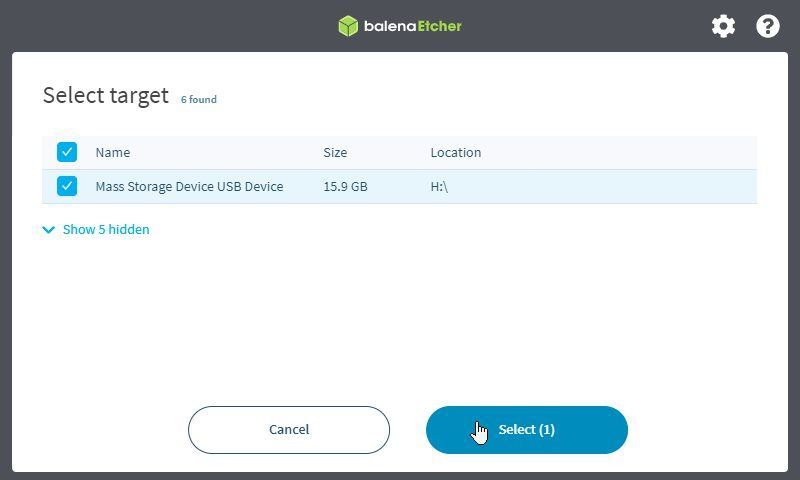
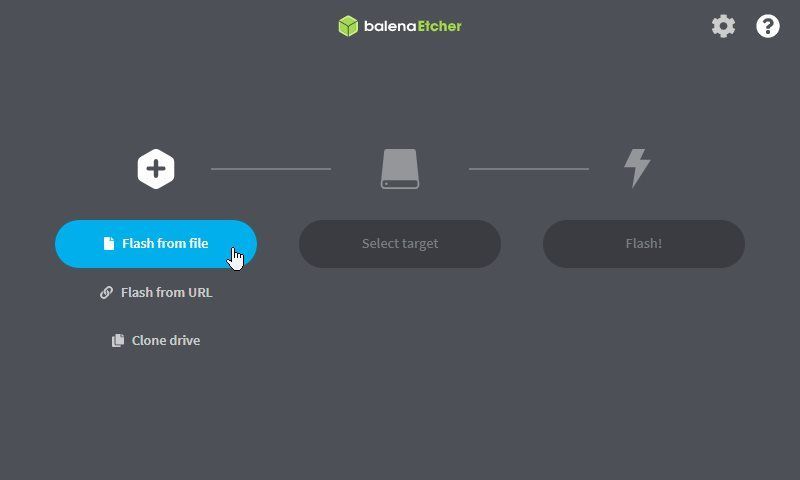
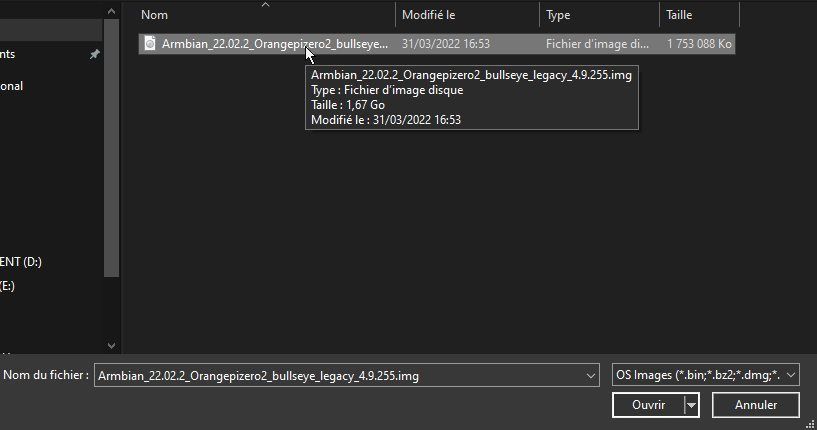
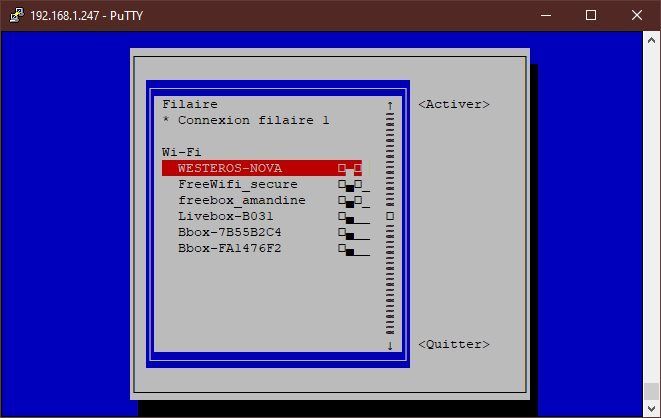
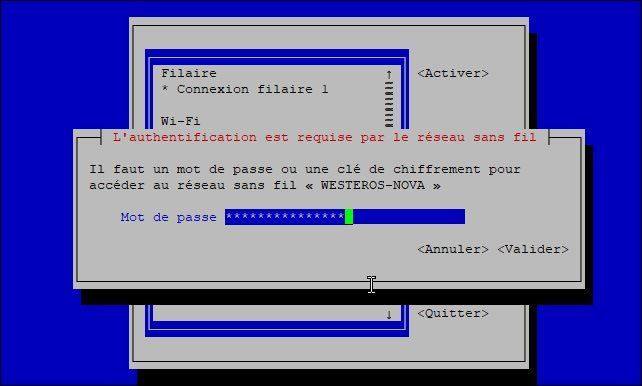
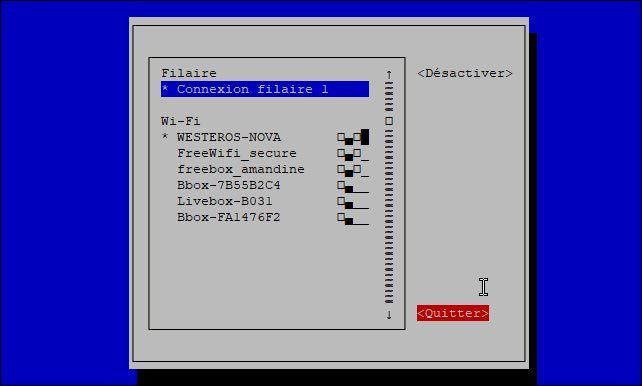
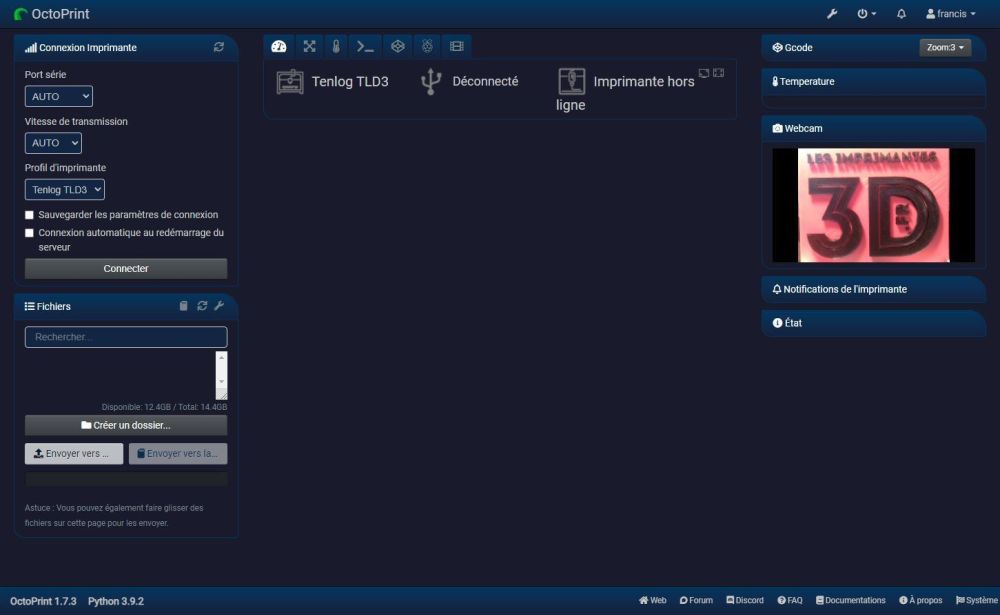
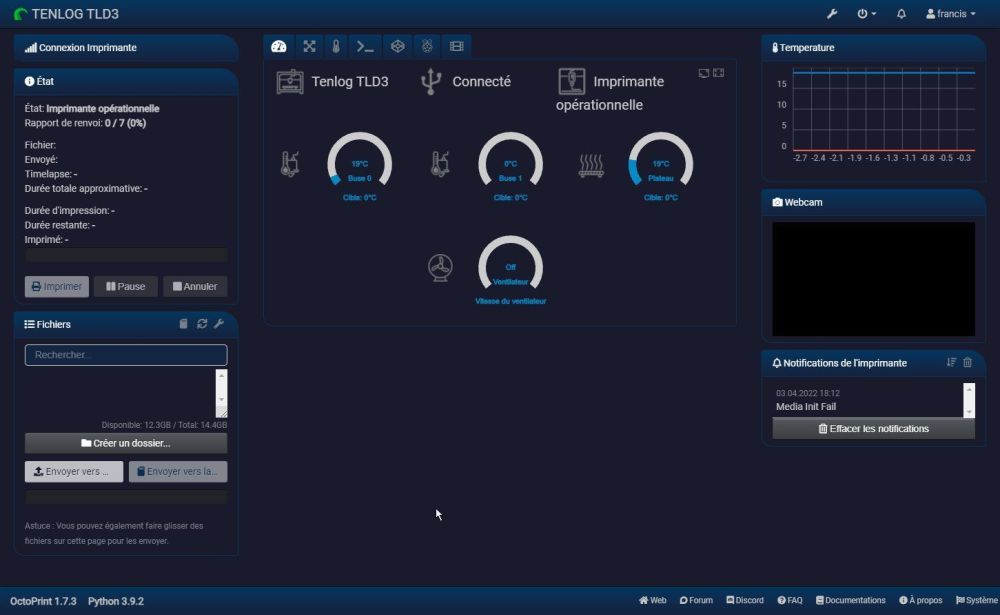
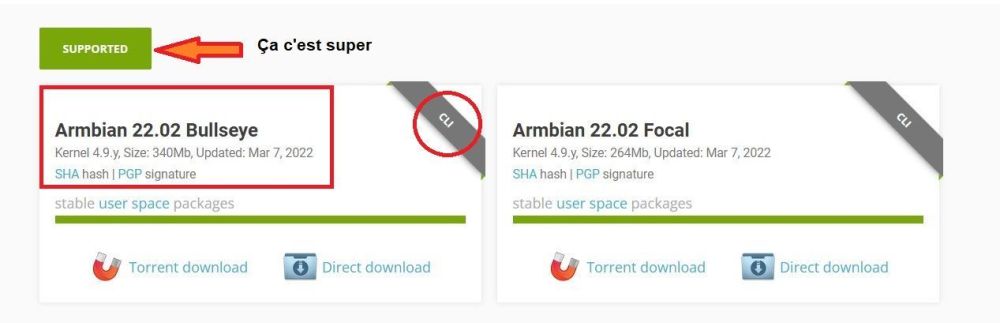
Comment installer Octoprint sur un Orange Pi Zero 2 (aka OPiz2) En préambule : Octoprint, permet : le suivi de l'impression de l'imprimante 3D (de n'importe où, sur votre smartphone par exemple), l’envoie de fichier à imprimer sans avoir à quitter votre ordinateur l’allumage/extinction de l'imprimante à distance la prévisualisation du modèle à imprimer la création de timelapses à partir de vos impressions. en option, la réception d’une alerte si l'imprimante commence à imprimer des spaghettis. Octoprint est un logiciel serveur HTTP, écrit en langage Python, censé fonctionner sur un petit ordinateur. La majorité du temps, il est installé sur un Raspberry Pi (un RPi0 v2 ou RPi3 étant le minimum requis) en téléchargeant une image pré-construite (OctoPi) ou encore manuellement via des commandes à exécuter après l’installation d’une image système minimale (Raspberry OS Lite précédemment nommée Raspbian). Cela signifie de se procurer un Raspberry Pi, un boîtier (on peut en imprimer un, ce ne sont pas les modèles qui manquent), probablement une caméra (Webcam / Raspicam) également, tout ceci, aujourd’hui n'est pas bon marché. En temps normal, il vous en coûterait environ 50€ (RPi3 ou RPi4) ou une vingtaine d’euros pour une RpiO V2 auxquels il faudrait ajouter le prix de la Webcam ou RaspiCam sans oublier une bonne alimentation 5,1V/3A. Vous n’êtes pas sans savoir ou alors vous êtes encore terré dans votre grotte depuis mars 2020 qu’une pénurie de composants affecte actuellement de nombreux secteurs. Réussir à se procurer aujourd’hui des cartes Raspberry Pi à des prix non stratosphériques relève de la gageure. Régulièrement, je consulte le site «RPiLocator» pour connaître l’état des stocks ainsi que les prix. La pénurie et/ou les prix pratiqués sont une des raisons pour laquelle on peut envisager se tourner vers d’autres cartes du même genre (OrangePi, BananaPi et autres variantes). La seconde raison, probablement la plus importante ayant conduit à la rédaction de ce tutoriel, est la conséquence d’un dépannage pour un de mes partenaires modérateurs. Grâce à lui, j’ai pu me faire la main sur une carte alternative au RaspberryPI : une OrangePI Zéro 2 C'est ce que l'on appelle une carte SBC (Single Board Computer) : - son facteur de forme est plus petit que celui d’un RPi3/4, - tout aussi rapide, - moins chère (normalement une trentaine d’euros mais plutôt autour de 35/40€ à ce jour) - et surtout actuellement disponible contrairement aux Raspberry Pi. Cette carte existe en deux versions : 512Mo / 1 Go de RAM (la différence de prix entre les deux n’est pas insurmontable). Le CPU utilisé est un Allwinner H616 (CPU ARM 64bits). ATTENTION : OrangePi fabrique de nombreuses cartes dont les noms sont parfois similaires mais dont les composants électroniques sont différents. Ne vous laissez donc pas tromper par toutes les autres cartes d'OrangePi (la Zero, la Zero+ ou encore la Zero+2). Cette carte peut fonctionner avec plusieurs systèmes d’exploitation : un fourni par le fabricant de la carte (avec interface graphique ou sans (version «serveur»)) ou avec le système Armbian (image dépouillée d’interface graphique, semblable au système Raspberry OS Lite donc) basée sur la dernière version de Debian (Bullseye). Récapitulatif du matériel : carte OrangePi Zero 2 (nommée OPiz2 dans le reste du document) alimentation 5V/2A, un câble USB-C (seules les broches 5V et de masse sont utilisées, un câble de données n’est donc pas indispensable), une carte µSD (8GB ou 16GB ou plus) optionnel, une webcam un HUB USB ou une carte additionnelle à monter sur la OPiz2 car d’origine un seul port USB est implanté sur la carte La voie avait déjà été débroussaillée par diverses lectures dont la principale, ce sujet de Blog. N’ayant pas exactement suivi ce qui y est décrit, je relate ici ce que j’ai fait pour obtenir au final quelque chose de fonctionnel. En espérant que je n’aurai rien oublié et que les étapes suivies permettront à d’autres d’obtenir le même résultat. Installation Le processus d'installation est assez simple, à condition que vous sachiez déjà comment utiliser Linux a minima. J’essaierais de détailler les différentes étapes. Préparation de la carte microSD Contrairement à votre ordinateur, cette carte ne possède pas d’équivalent d’un BIOS pour démarrer. Le système d'exploitation doit être écrit sur une carte SD. Le système démarrera et fonctionnera à partir de cette carte µSD. Une carte de 8GB ou plus est nécessaire. Plus la capacité de stockage de la carte est grande, moins elle risquera de manquer d'espace avec les mises à jour logicielles et moins elle risquera d’être endommagée par l'usure de la carte due aux écritures / réécritures sur celle-ci. En l’occurrence, la carte μSD utilisée est une Sandisk Ultra de 16Go (classe 10 / A1). Une fois la carte SD à disposition, télécharger l'image Armbian pour la carte OPiz2 à partir d'ici (le choix de votre méthode de téléchargement dépend de vos préférences (P2P ou direct)). Le «gros» bouton vert [SUPPORTED] permet de savoir que cette image fonctionne avec cette carte ;-) L’image utilisée sera celle basée sur une Debian (Bullseye), il en existe une seconde, basée sur Ubuntu (Focal) que je n’ai ni utilisée ni testée. Vous devrez ensuite décompresser ce fichier avec le logiciel de décompression 7zip (Windows) ou avec The Unarchiver (MacOS). Les deux sont gratuits, seul 7Zip a été testé car je ne possède aucun équipement de la marque à la pomme. Les utilisateurs de Linux devront installer «p7zip» (la version «terminal» de 7zip). Sur un système Debian/Ubuntu, ouvrir un terminal et saisir : sudo apt install p7zip Une fois p7zip installé, saisir dans le terminal la commande suivante pour extraire l’image : 7zr x nom-de-l-image.7z Remplacer évidemment « nom-de-l-image» par le nom de l’archive téléchargée. Une fois l'archive décompressée, vous obtiendrez un fichier d'extension .img. Celui-ci devra être gravé sur la carte SD. Flash de l’image Le logiciel BalenaEtcher sera utilisé pour cette «gravure»: choix du fichier .img sélection du lecteur de carte µSD sur votre ordinateur (bien vérifier que la taille correspond à celle de votre carte SD, ne sélectionnez pas un autre disque dur de votre ordinateur ici) gravure de l'image puis vérification (quelques minutes de patience) éjection de la carte de votre ordinateur C’est fini pour cette étape ! A noter : Premier lancement Le premier démarrage sera un peu long car le système étendra la capacité de stockage en redimensionnant la partition à la capacité maximale de celle-ci. Insérer la carte SD dans le lecteur de l’OPiz2 (emplacement sous la carte) et démarrer la carte en branchant le câble USB-C relié à l’alimentation. Un câble Ethernet doit être branché de votre routeur au port OPiz2, même si vous avez l'intention d'utiliser le Wifi par la suite. Attendez bien que la diode de la carte passe au vert (indique que le réseau est connecté: la carte a reçu une adresse IP attribuée via DHCP). Une fois fait, il faudra trouver quelle adresse IP a été attribuée par votre routeur à l'OPiz2. Plusieurs façons de découvrir cette adresse (une de celles ci-dessous devrait vous le permettre : Connexion initiale à l'OPiz2 Vous êtes désormais en possession de l'adresse IP de la carte, il faut s’y connecter en SSH. Libre à vous d’utiliser le client qui vous sied (Linux et MacOS, possèdent un client natif : il suffit de taper ssh root@192.168.1.247 (en remplaçant par l'adresse IP de la carte) dans un terminal. Sous Windows, vous pouvez (W10 / W11) également utiliser le client natif (ouvrir un terminal (Invite de commandes) puis ssh root@192.168.1.247 ) ou vous pouvez télécharger Putty et utiliser son interface graphique. A la première connexion en ssh sur la OPiz2, un message d’avertissement s’affichera. Il faudra accepter l’empreinte de la clé SHA256 avant de pouvoir poursuivre. NB : Il n'y a pas de compte par défaut autre que 'root' dans l'installation d'Armbian. Après l'installation, les utilisateurs se connectent à l'unité en tant que "root" et sont invités à changer le mot de passe root, puis à créer un nouveau compte utilisateur. Donc par défaut Armbian accepte l’usager «root» avec le mot de passe «1234». Il faut normalement procéder au changement de ce mot de passe «faible» par un plus «fort». Ce nouveau MDP doit remplir de nombreux critères avant d’être accepté (longueur, caractères autorisés, n’appartenant pas à un mot du dictionnaire, …). Ça m’a vite «énervé», en saisissant plusieurs fois le mot de passe par défaut (j'ai insisté ), j’ai tout de même accès en tant que «root» (équivalent de Dieu pour les croyants ). Pour éviter qu’à la prochaine connexion, Armbian me redemande de modifier le mot de passe, quelques commandes sont nécessaires (et suffisantes, ne pas saisir les parenthèses ni le texte contenu dans celles-ci ) : # pwd (où est-on dans l’arborescence) # ls -al (afficher le contenu du dossier, normalement /root) # rm -f .not_logged_in_yet (supprimer ce fichier sinon à la prochaine connexion, il sera demandé de modifier le mdp de root avec les critères vus plus haut) # echo -e "1234\n1234\n" | (passwd root) Le mot de passe root initial est désormais «fixé» à «1234» (vous pourrez évidemment le modifier quand vous le voudrez). Mise à jour du système d'exploitation Les premières commandes à exécuter permettent de récupérer la dernière version du système d'exploitation et de le mettre à jour. # apt update les dépôts logiciels sont consultés pour établir la liste en cours... # apt upgrade S’il y a des mises à jour, répondre oui en tapant 'y’ puis patienter le temps que les paquets soient récupérés et installés. Vous devrez exécuter cette paire de commandes de temps en temps pour maintenir votre système à jour (astuce : on peut effectuer les deux étapes avec une seule ligne en les combinant avec le double ampersand (&&) : apt update && apt upgrade). Avant de poursuivre, on va «localiser» notre système (date et heure, langue, clavier). Plusieurs manières de faire sont possibles, Armbian à l’instar de Raspberry OS, possède un outil de configuration : armbian-config à utiliser en super administrateur («root»). En ligne de commandes, on peut également utiliser les commandes Debian classiques : dpkg-reconfigure Via armbian-config (date & heure, langue, clavier) : - Personal / Time Zone - Personal / Locales - Personal / Keyboard (n’a pas fonctionné pour moi :(, j’ai dû passer par dpkg-reconfigure keyboard-configuration) Activation du WIFI Pour activer le WIFI, vous devez rejoindre un réseau WIFI. Exécuter la commande «armbian-config» pour rechercher un réseau WIFI et le rejoindre. Si cela échoue, vous devrez quitter le logiciel, taper sync et redémarrer la carte et réessayer une fois qu'elle aura redémarré. ou bien exécuter la commande nmtui-connect en tant que root pour afficher les points d’accès disponibles. Sélectionner celui auquel on souhaite se connecter, valider, saisir le mot de passe de ce point d’accès. Vérifier que le lien WIFI fonctionne en vous saisissant la commande «ifconfig» qui affichera les cartes réseau possédant une adresse IP. Celle qui nous intéresse est le lien «wlan0» Avant de débrancher le câble Ethernet, via une nouvelle instance 'ssh' se connecter à l’adresse IP «Wifi» (différente de celle en RJ45 car les adresses MAC des cartes réseau sont normalement différentes): «ssh root@ADRESSE.IP.WIFI.OPiz2» Installation d'Octoprint Pour installer Octoprint, nous devons d'abord créer un utilisateur à faible privilège, puis lui donner les droits minima requis pour exécuter Octoprint et se connecter à n'importe quel périphérique (imprimante, caméra, etc.). 1) Création de l’utilisateur «pi» : # adduser pi 2) Modifications des groupes de «pi» : # usermod -a -G video, ssh, dialout, tty, sudo pi 3) On met un mot de passe à cet utilisateur (ici = orangepi) : # passwd pi ou # echo -e "orangepi\norangepi\n" | (passwd pi) 4) Installation des paquets nécessaires : # apt install python3-pip python3-dev python3-setuptools python3-venv git libyaml-dev build-essential ffmpeg Quelques vérifications : # ls /home Le dossier «pi» doit appartenir à l'utilisateur pi et au groupe pi (pi:pi). 4) A partir de maintenant les opérations seront réalisées en tant qu’utilisateur «pi» , on bascule sur le shell de cet utilisateur : # su -u pi bash On vérifie qu’on est bien cet utilisateur : $ whoami Où est-on dans l’arborescence du système : $ pwd On doit normalement être dans le dossier personnel de «pi» : /home/pi. Si ce n’était pas le cas, se placer dans ce dossier perso : $ cd ~ ou $ cd /home/pi On est bien dans un sous-shell pour cet utilisateur pi. Il reste à installer Octoprint. La documentation écrite par @foosel (Gina Häußge, l’autrice d’Octoprint), bien que prévue pour un Raspberry, indique les étapes à suivre. 1) Création du dossier accueillant Octoprint et déplacement dans celui-ci : $ mkdir OctoPrint && cd OctoPrint 2) Passage en environnement virtuel pour Python : $ python3 -m venv venv $ source venv/bin/activate 3) Mise à jour de «pip» : $ pip install pip --upgrade 4) Installation du paquet Python «Octoprint» : $ pip install octoprint 5) Lancement du serveur : $ ./OctoPrint/venv/bin/octoprint serve Cette étape (5) est nécessaire. Un dossier caché (.octoprint) est alors créé dans /home/pi. Il contient de nombreux autres dossiers ainsi que le fichier config.yaml, tous nécessaires au bon fonctionnement d'Octoprint. [Note de foosel à propos de l’environnement virtuel : Si tout s'est bien passé lors du lancement de la dernière commande (démarrage du serveur Octoprint), vous devez vous connecter via le navigateur de votre ordinateur à l’adresse: http://adresse.ip.lan_ou_wifi.opiz2:5000 puis suivre les instructions de l'assistant de configuration de cette page pour finaliser l'installation du serveur Octoprint Hello world, premier accès : Si la page s’affiche, comme ci-dessus, tout est bon Pour arrêter le serveur d'impression Octoprint, dans la console appuyer sur Ctrl + C et ensuite Ctrl + D, pour revenir au shell de l’utilisateur «root». Quelques «améliorations» (en tant que maître des lieux soit «root») S'assurer qu'Octoprint démarre automatiquement lors du démarrage du système en ajoutant un service: On récupère sur le Github du projet Octoprint ce service et dans la foulée on le déplace à l’endroit adéquat: # wget https://github.com/OctoPrint/OctoPrint/raw/master/scripts/octoprint.service && mv octoprint.service /etc/systemd/system/octoprint.service # systemctl enable octoprint # systemctl start octoprint Vérifiez que vous pouvez à nouveau vous connecter via votre navigateur, et si cela fonctionne, c'est presque terminé ! Étapes supplémentaires pour se faciliter encore plus la vie A) Ajouter à Octoprint des «superpouvoirs» (redémarrage automatique, arrêt du système, …). Pour cela, vous devez accorder certains privilèges à l'utilisateur pi. Vous ne voulez pas accorder des droits sudo complets à cet utilisateur (si un bogue ou un exploit se produisait dans Octoprint, votre système serait en danger). La meilleure solution ici est de n'accorder à l'utilisateur pi que les commandes sudo nécessaires. Plutôt que modifier le fichier /etc/sudoers (à faire via «visudo»), on va ajouter deux fichiers dans le dossier /etc/sudoers,d/ 1) Créer un fichier /etc/sudoers.d/octoprint-shutdown (en root) avec le contenu suivant : pi ALL=NOPASSWD: /sbin/shutdown 2) Créer un fichier /etc/sudoers.d/octoprint-service (en root) avec le contenu suivant : pi ALL=NOPASSWD: /usr/sbin/service Une dernière commande concerne les droits de ces deux fichiers : # chmod 0440 /etc/sudoers.d/* B) Pouvoir utiliser une caméra En «root» : # apt install subversion libjpeg62-turbo-dev imagemagick ffmpeg libv4l-dev cmake En «pi» ( =># sudo -u pi bash) $ cd ~ $ git clone https://github.com/jacksonliam/mjpg-streamer.git $ cd mjpg-streamer/mjpg-streamer-experimental $ export LD_LIBRARY_PATH=. $ make Il ne devrait pas y avoir d’erreurs. Un test avec : $ ./mjpg_streamer -i "./input_uvc.so" -o "./output_http.so" devrait retourner quelque chose du genre : MJPG Streamer Version: svn rev: i: Using V4L2 device.: /dev/video0 i: Desired Resolution: 640 x 480 i: Frames Per Second.: 5 i: Format............: MJPEG [...] o: www-folder-path...: disabled o: HTTP TCP port.....: 8080 o: username:password.: disabled o: commands..........: enabled Si une caméra est connectée via le seul port USB, le navigateur pointé sur http://<OPiz2.IP>:8080/?action=stream devrait afficher un flux vidéo. Si c’est bon, on va automatiser le démarrage du serveur vidéo : - créer un dossier nommé «scripts» dans le home de pi : # mkdir /home/pi/scripts - créer un fichier dans /home/pi/scripts/ nommé webcamDaemon : # touch /home/pi/scripts/webcamDaemon (plus rapide) >/home/pi/scripts/webcamDaemon - éditer ce fichier via nano en recopiant le contenu suivant : - enregistrer ce fichier (CTRL+X en répondant Oui ( ou CTRL+O pour enregistrer puis CTRL+X pour Quitter nano) ), - rendre ce fichier exécutable et faire que 'pi' en soit "propriétaire" via : chmod +x /home/pi/scripts/webcamDaemon && chown -R pi:pi /home/pi/scripts - créer un fichier dans /etc/systemd/system/, nommé webcamd.service (nano /etc/systemd/system/webcamd.service) avec le contenu suivant : - Recharger les services puis activer et démarrer ce nouveau service :: # systemctl daemon-reload # systemctl enable webcamd # systemctl start webcamd Pour pouvoir arrêter / démarrer ce service via Octoprint, il faut ajouter la section suivante dans le fichier config,yaml (dans le dossier caché ,octoprint => /home/pi/.octoprint/config.yaml) Rendre Octoprint accessible via le port 80 au lieu de 5000 Le mieux est d’utiliser «haproxy» en tant que proxy inverse plutôt que configurer Octoprint tournant sur le port 80 (serveur Web). Pourquoi ? - installer haproxy : # apt install haproxy - modifier le fichier de configuration /etc/haproxy/haproxy.cfg avec le contenu suivant :: Ainsi, Octoprint sera accessible via http://<Opiz2.IP>/ et le flux de la Webcam sera accessible via http://<Opiz2.IP>/webcam/ Pour que tout fonctionne, il faudra modifier le fichier /etc/default/haproxy en ajoutant la ligne ENABLED=1 (ne semble plus une étape nécessaire) - activer puis lancer le service haproxy : # systemctl enable haproxy # systemctl start haproxy Il ne restera plus qu'à ajouter dans la configuration d’Octoprint les chemins d’accès dans la section «Caméra et Timelapses» (pour le flux : /webcam/?action=stream , pour les clichés : http://127.0.0.1:8080/?action=snapshot ). Dernières «améliorations» non indispensables mais probablement pratiques La carte OPiz2 comme d’autres cartes d’OrangePi, possède un connecteur GPIO (deux en fait). Armbian gère un peu différemment ces broches par rapport au Raspberry Pi. Avec «Raspbian», les fichiers /dev/gpiochip0 (ou 1) appartiennent à root et au groupe gpio et ont pour droits crw-rw----- (0660) Avec «Armbian», les fichiers /dev/gpiochip0 (ou 1) appartiennent à root et au groupe root et ont pour droits crw-------- (0600) Pour fixer ceci et permettre qu’un éventuel greffon Octoprint utilisant les gpio fonctionne, il faut effectuer quelques modifications : - créer un groupe gpio et ajouter l’utilisateur pi à celui-ci : # groupadd gpio # usermod -aG gpio pi - vérifier que le groupe a bien été créé ainsi que ses membres : # getent group | grep gpio - créer des régles UDEV avec les bonnes «ACLSs» : # >/etc/udev/rules.d/96-gpio.rules (ou) # touch /etc/udev/rules.d/96-gpio.rules - ajouter le contenu suivant via # nano /etc/udev/rules,d/96-gpio.rules - sauvegarder le fichier précédent, et recharger ces règles UDEV : # udevadm control –reload-rules && udevadm -trigger Si tout s’est bien déroulé, les droits et appartenances des périphériques «gpio» devraient être identiques à ceux d’un Raspberry : pi@armbian:~$ ls -l /dev/gpiochip* crw-rw---- 1 root gpio 254, 0 Dec 28 19:16 /dev/gpiochip0 crw-rw---- 1 root gpio 254, 1 Dec 28 19:16 /dev/gpiochip1 Les greffons Octoprint faisant appel aux gpios devraient fonctionner à condition d’utiliser les bonnes déclarations (différents d’un Rpi ;-) ), à vérifier sur le site du fabricant en fonction du modèle. Diagramme des broches (pins) de l’OPiz2 : Dernière «amélioration», permettre l’accès au contenu du dossier «pi» à partir d’un ordinateur du réseau Cela n’a rien d’obligatoire mais c’est bien pratique. Pouvoir accéder au contenu du dossier «pi» via le protocole SAMBA, en tapant l’adresse IP de la carte dans l’explorateur (ex : \\192.168.1.247). Pour cela, il faut ajouter quelques logiciels : # apt install samba cifs-utils smbclient Ensuite modifier le fichier /etc/samba/smb.conf : # nano /etc/samba/smb.conf en ajoutant en fin de fichier : Pour prendre en compte ces modifications : # systemctl reload smbd # systemctl status smbd Ne pas oublier d’ajouter l’utilisateur «pi» à Samba en lui mettant un mot de passe («orangepi» identique à celui fixé précédemment mais il pourrait être différent, Windows le demandera à la première connexion sur le partage) : smbpasswd -a pi (ou "echo -e "orangepi\norangepi\n" | (smbpasswd pi)" ) CONCLUSION Une fois toutes ces étapes réalisées, Octoprint est pleinement fonctionnel, en tout cas pour moi. L’ajout de quelques greffons permet d’améliorer l’affichage : Une fois l’imprimante connectée en USB sur la carte OPiz2 (à noter que la Webcam ne s’affiche plus car je n’ai pas le Hat USB donc c’est comme au restaurant «fromage ou dessert» (le OU exclusif pour les amateurs de mathématiques)) : Les greffons ajoutés sont UI customizer, Dashboard, Resource Monitor, Auto Login Config, Multiple Upload. En espérant que ce document pourra être utile à ceux voulant se lancer avec cette carte Orange Pi Zéro 2 <EDIT> J'ai oublié de parler de la sauvegarde de la carte SD, une fois tout paramétré et fonctionnel. Comme sur la plupart de mes matériels informatiques, je fais régulièrement des sauvegardes (pour le cas où ). Pour réaliser des copies du contenu de mes cartes SD (ou clé USB ou disques durs éventuellement), j'utilise avec Windows le programme ImageUSB (lien vers l'éditeur officiel). L'avantage de ce programme est de ne pas avoir besoin d'être installé sur le matériel d'où l'on effectue la copie ( plus d'infos => ici , là et encore là ). Une fois la copie de l'image de la carte faite, un coup de 7zip (extension .7z) permet de réduire drastiquement la taille initiale de l'image (= taille de la carte SD) sans évidemment perte de données ) J'ai donc une copie (en fait plusieurs en fonction des étapes de configuration du système) qui sont toutes de moins d'un giga octets avec ma carte SD de 16Go (taille de fichier trop importante pour les capacités du forum mais que je pourrais éventuellement mettre à disposition via un lien de partage de fichiers). D'ici quelques temps, je mettrai à disposition quelques scripts permettant d'accélérer les étapes de création du système (n'ayant plus la carte OrangePi Zero 2, retournée chez son propriétaire, la mienne devrait arriver d'ici quelques semaines pour tester et vérifier le bon fonctionnement des scripts d'installation). L'installation via des scripts, c'est >>> ici <<<




 1 point
1 point -
Pas de soucis j'ai un cube Voron a 150% de taille en cours pour test, avec 200mm/s de vitesse d'impression et 15k d'accélération (j'ai garder de la marge par rapport 17k et des poussière supporter )1 point
-
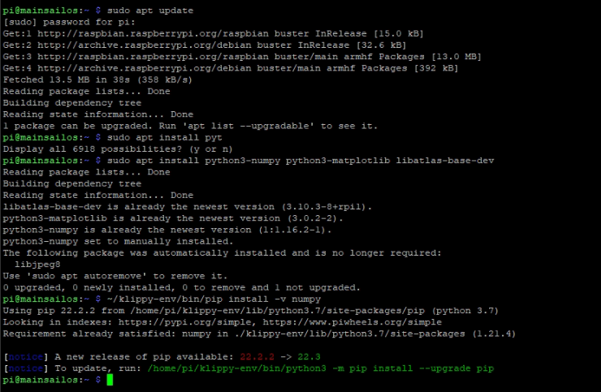
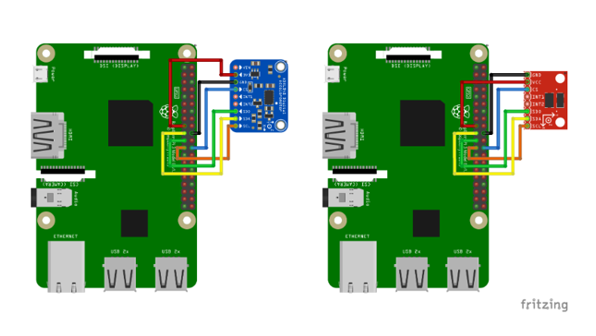
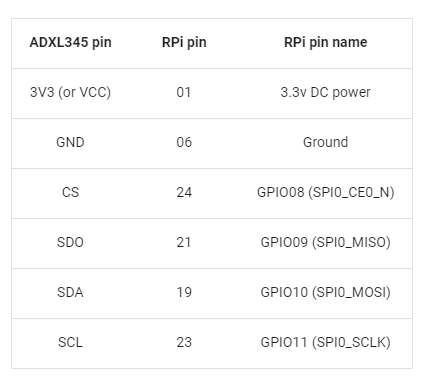
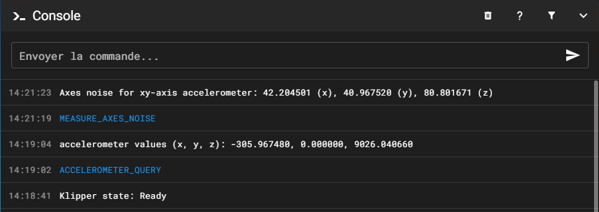
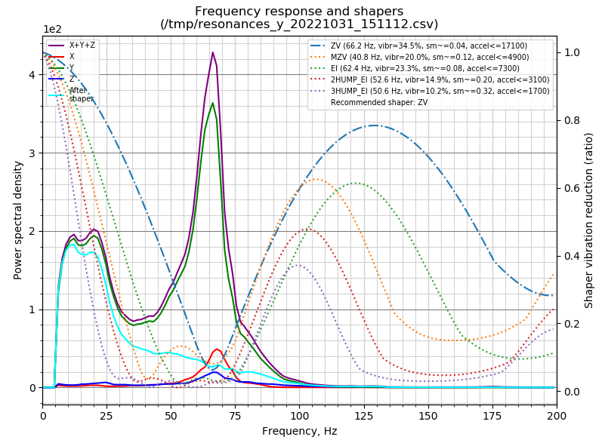
Voici une petite procédure a ajouter a ce que tu as fait @pixeldesbois, j'ai fini la calibration de la résonance via l'ADXL 345. J'espère que ce sera compréhensible et clair pour tous. Procédure simplifié ADXL345 Klipper Choix de l’ADXL345, il y a pas mal de modèles d’AXL345, perso j’ai choisi ce modèle très économique 1.49€ sur aliexpress, mais nécessitera la création d’un câble Dupont sur mesure pour le brancher sur le Pi. Mais il y a une solution qui peut être intéressante c’est ce modèle TriangleLab qui ce connecter en Usb-A/Usb-C avec câble USB de 2m mais a 19€. On a une doc explicative de son installation. Je vous laisse regarder la procédure d'installation de ce modèle fournit par TriangleLab sur leur Drive. Se connecter au RPi via Putty et taper les commandes d’uptade et d’install des dépendances et programme utile (dans mon cas toutes les dépendante et MaJ était ok). - sudo apt update - sudo apt install python3-numpy python3-matplotlib libatlas-base-dev - ~/klippy-env/bin/pip install -v numpy Installer le script rc Si vous souhaitez utiliser l’hôte comme microcontrôleur secondaire, le processus klipper_mcu doit s’exécuter avant le processus klippy. Après avoir installé Klipper, installez le script. Executer: cd ~/klipper/ sudo cp "./scripts/klipper-mcu-start.sh" /etc/init.d/klipper_mcu sudo update-rc.d klipper_mcu defaults Création du code du microcontrôleur Pour compiler le code du micro-contrôleur Klipper, commencez par le configurer pour le « processus Linux » : cd ~/klipper/ make menuconfig Dans le menu, réglez « Architecture du microcontrôleur » sur « Processus Linux », puis enregistrez et quittez. Pour générer et installer le nouveau code du microcontrôleur, exécutez : sudo service klipper stop make flash sudo service klipper start Si klippy.log signale une erreur « Autorisation refusée » lors de la tentative de connexion à, vous devez ajouter votre utilisateur au groupe tty. La commande suivante ajoutera l’utilisateur « pi » au groupe tty :/tmp/klipper_host_mcu sudo usermod -a -G tty pi Activation de SPI Sous Putty taper la commande : sudo raspi-config Puis dans le menu « Option d’interface » activé le SPI et quitter le menu. Cablage ADXL345 : 2 exemple d'ADXL345, perso celui que j'ai c'est celui de droite Configuration printer.cfg Assurez vous d’avoir ou d’ajouter les lignes de gestion de l’ADXL345 dans le fichier printer.cfg sous Klipper. [mcu rpi] serial: /tmp/klipper_host_mcu [adxl345] cs_pin: rpi:None [resonance_tester] accel_chip: adxl345 probe_points: 0, 0, 20 # Valeur pour Delta @MrMagounet Klipper est prêt pour les mesures de résonances Phase de test ADXL345. Pour usage avec un seul accéléromètre (cas de la SR et des Delta) Test de la connexion : ACCELEROMETER_QUERY On doit obtenir une réponse type : Recv: // adxl345 values (x, y, z): 470.719200, 941.438400, 9728.196800 Si l’on obtient une erreur type : Invalid adxl345 id (got xx vs e5)xx Alors cela indique un souci de connexion ADXL345 ou d’accéléromètre défectueux. MEASURE_AXES_NOISE Cette commande permet de mesurer le bruit de l’accéléromètre pour chaque axe. On doit obtenir une valeur mesurée entre 1-100, si l’on obtient 1000 ou plus alors cela indique un souci avec le capteur ADXL345. Mesure de résonance Résonance de l’axe X, Faire un Home (G28) puis taper la commande : TEST_RESONANCES AXIS=X Si cela fonctionne pour l’axe X alors faire la commande pour le Y, taper : TEST_RESONANCES AXIS=Y Cela générera 2 fichiers CSV. (:/tmp/resonances_x_*.csv /tmp/resonances_y_*.csv) Ces fichiers peuvent être traités avec le script autonome sur un Raspberry Pi. Pour ce faire, exécutez les commandes suivantes ~/klipper/scripts/calibrate_shaper.py /tmp/resonances_x_*.csv -o /tmp/shaper_calibrate_x.png ~/klipper/scripts/calibrate_shaper.py /tmp/resonances_y_*.csv -o /tmp/shaper_calibrate_y.png Cela va générer les graphiques avec les fréquences et shaper suggéré pour notre machine. Via WinSCP récupérer sur le Pi les graphiques X et Y les images sont dispo dans le dossier ~/tmp/ Ajouter la Valeur ZV comme paramètre input shaper de l’axe en question, dans le cas d’un Delta on doit avoir le X et le Y le plus proche possible, ici dans mon cas j’ai mis une valeur de 67 (comprise entre le 66.2 de Y et 67.6 de X). Si vous avez ajusté la tension des courroies pour avoir un résultat uniforme en X et Y alors refaire les Delta calibration, Z-offset et Bed Mesh. (Oui si le résultat des 2 Graphes n'est pas proche il est fort probable que les courroies est pas la même tension)
 1 point
1 point -
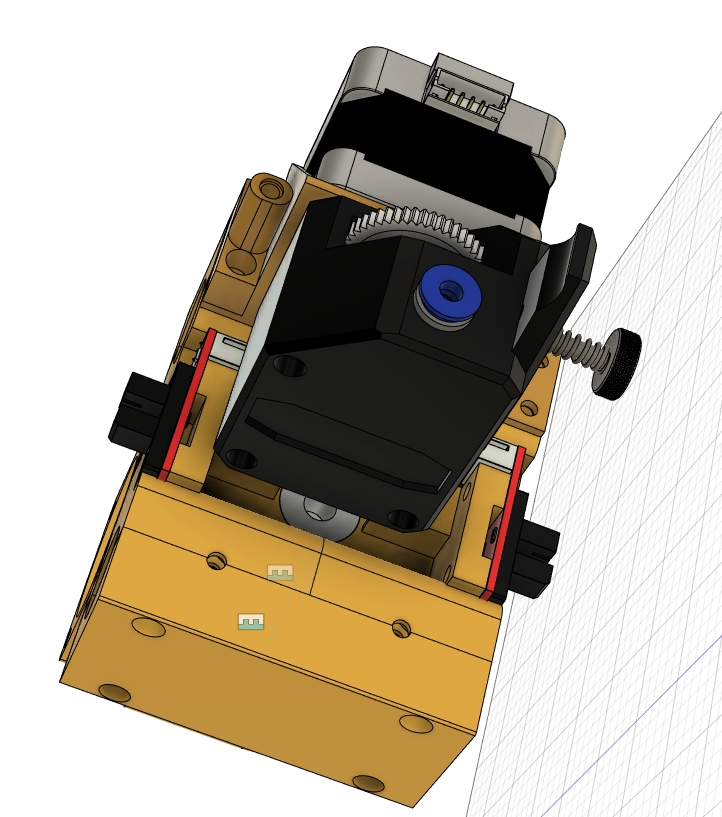
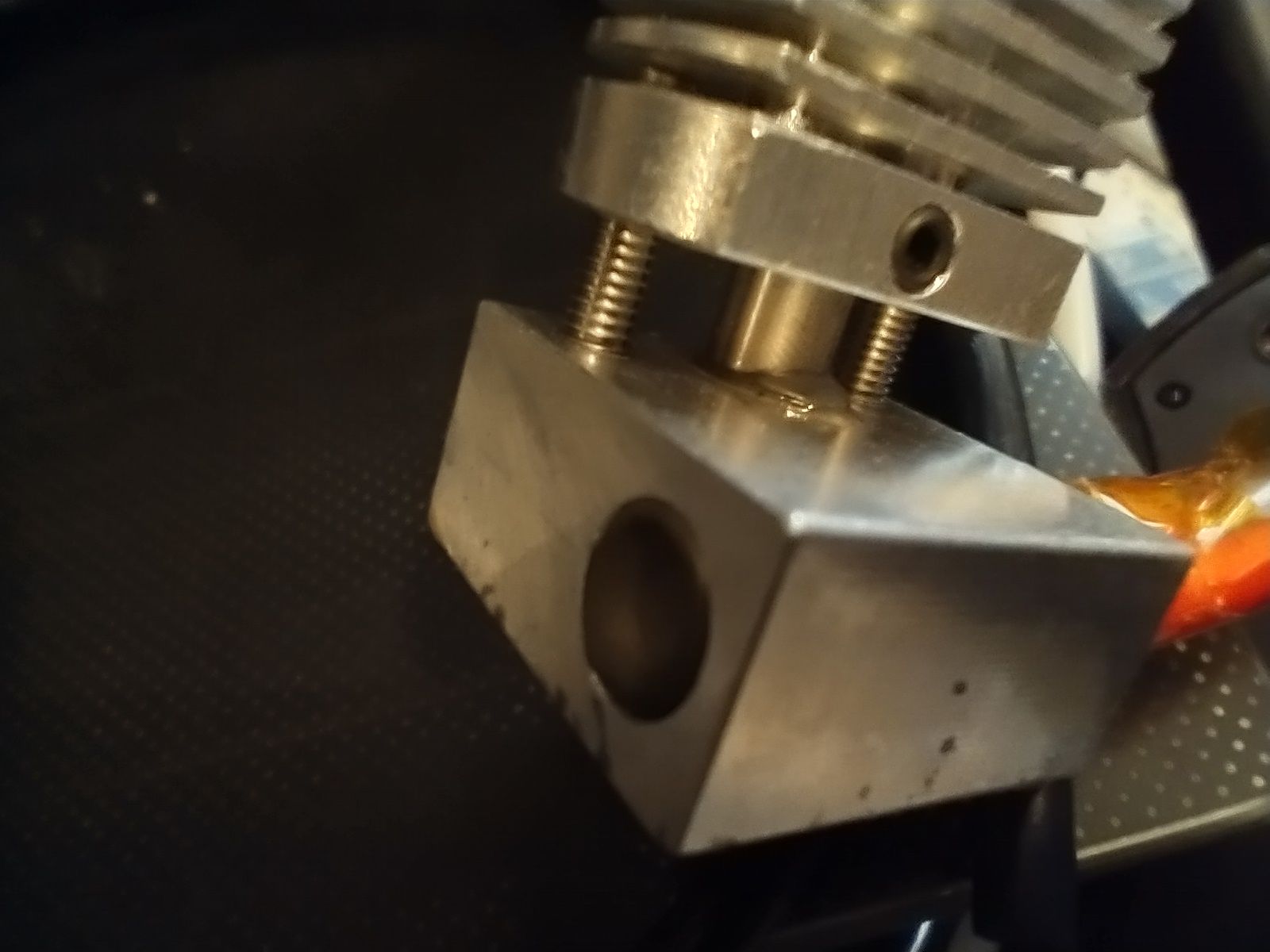
C'est bien ce que je craignais N'achète pas ça. Aucun intérêt pour ce heatbreak bi-metal qui laisse passer le PTFE tout du long (heatbreak «passthrough») , si éventuellement tu persistais à vouloir l'acheter il faudrait pour le monter procéder en utilisant la méthode de @Titi78(s'assurer que la triple jonction heatbreak / buse / PTFE est absolument «étanche»). Je ne comprends même pas comment on peut oser vendre un tel article Un vrai heatbreak bi-metal (le prix est un peu plus élevé) n'a d'intérêt que s'il arrête le tube PTFE plus haut que la buse (dans le radiateur donc), ce qui permet de se dispenser du positionnement parfait du PTFE sur la buse, dans ce cas, il faudra juste s'assurer que le heatbreak et la buse sont bien serrés l'un contre l'autre (à chaud c'est mieux ou à froid avec une clé dynamométrique pour buse ), buse non collée au bloc de chauffe évidemment.1 point
-
Oui, c'est même très choquant. La Ender3-S1 avec sa tête Sprite possède une extrudeuse en direct drive. La rétraction normalement est plutôt de 0,8-1 mm pour du PLA et moins de 2 mm avec du TPU. 10,5mm même sur une CR20 (=Ender3 «carrossée») c'est franchement beaucoup. Mes grosses imprimantes ( 300 x 300 mm de surface) en extrudeur bowden avec des PTFE d'une cinquantaine de centimètres n'ont pas besoin de plus de 6-6,5mm de rétraction.1 point
-
Pleinement d'accord avec @RFN_31 En plus, j'ai l'impression (bad joke) que l'extrudeur de la seconde proposition est celui en plastique (le «mou du genou» dont le bras de levier se fissure) mais dans la description il est dit que c'est du tout métal. Pour la première proposition, le heatbreak bi-metal m'a l'air «étrange» (d'où son prix ?) : le côté en contact avec la buse a l'air bien gros (normalement le diamètre du passage de ce côté est de 2mm). Je ne peux vérifier en l'absence de lien (photo uniquement avec des yeux n'ayant plus vingt ans (depuis longtemps)).1 point
-
+1 pour le leste, le silicone et la pause ! Pour l'électronique ça doit pouvoir se régler aussi1 point
-
Salut, dans ce cas là il faut faire une pause... le problème d'étanchéité doit pouvoir se résoudre avec un peu de silicone. L'accélération à l'envers se règle soit sur l'esc soit sur la télécommande. Le problème le plus embêtant est le centrage. Mais il doit y avoir une sacrée différence pour qu'il se mette à la verticale sans prendre l'eau. Il va peut-être falloir lester l'avant sinon avancer un peu la batterie (c'est souvent elle qui pose problème). Courage en tout cas, ne désespère pas ! Prends les problèmes un par un. A+1 point
-
Energetic 3D sur aliexpress : très bonne qualité.1 point
-
un début de piste par-là : Measuring Resonances - Klipper documentation (klipper3d.org) L'ADXL345 est un accéléromètre qui se positionne sur la tête de l'imprimante, il faut qu'il soit parfaitement fixé et dans le bon sens par rapport à ses accéléromètres internes (respecter X et Y en gros ... avec une delta Y avant arrière et X droite gauche). La mesure n'est nécessaire que pour les réglages. Il peut être démonté après usage et Il ne faut pas en abuser (pas la peine de faire un test par jour pendant 1 an par ex) , les tests ont tendance à stresser la mécanique puisque le but c'est de trouver la fréquence de résonnance (et de l'éliminer).1 point
-
Quand j'ai modelisé mon fang sur ma creality cr-10s j'ai fait en sorte que le flux soit dirigé sous la buse. Il doit refroidir le filament mais surtout pas la buse Pour ajuster le bec j'ai fait en sorte qu'il soit réglable en hauteur via des vis de réglage Pour peaufiner le tout j'ai modelisé un embout que j'ai taillé en bois et qui s'insère dans la sortie du fang. Cela me permet en jouant du décapeur thermique avec légèreté de déformé la sortie d'air pour l'ajuster au mieux. Pour visualiser le flux d'air j'ai utilisé de la fine sciure de bois dans le ventilateur en marche. De mémoire jai monté un 5015 il me semble. En tout cas c'est un ventilateur radial Ça fait un bon moment que j'ai fais ça et ça fonctionne toujours aussi bien


 1 point
1 point -
il faut régler le PID du plateau en envoyant cette commande, pour un réglage à 70°C: M303 E-1 S70 C8 en retour: RECU: p:841.68 i:152.12 d:1164.25 tu envoies la commande avec tes propres valeurs: M304 P841.68 I152.12 D1164.25 Tu sauvegardes et tu lis les valeurs de l'eeprom: M500 M501 Tu peux envoyer des commandes GCode depuis un ordinateur raccordé en USB grâce à un logiciel comme pronterface (voir ici pour l'installation et là pour le paramétrage) ou repetier host par exemple. Il faudra au préalable installer le driver USB CH340 dispo ici (version windows).1 point
-
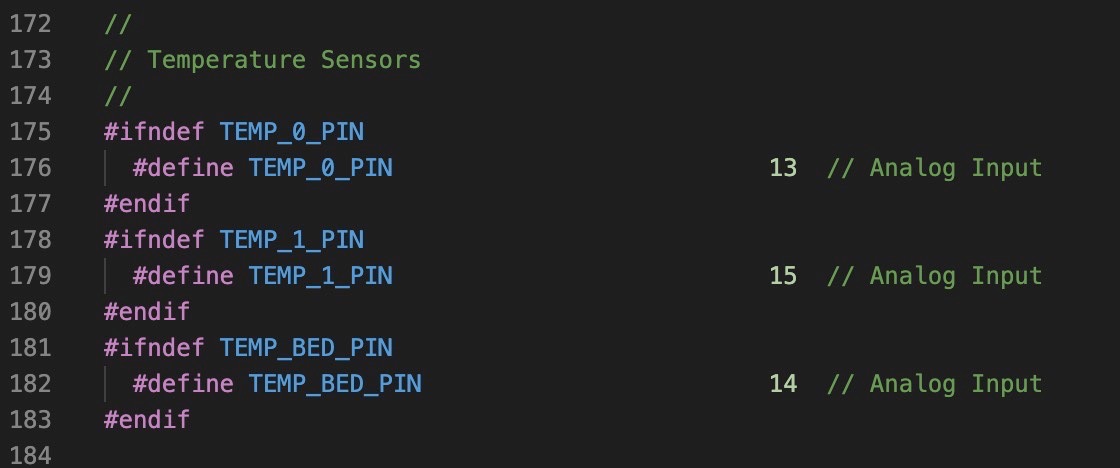
C'est bien ça, mais il est préférable de faire la modification dans le fichier configuration.h afin de conserver les fichiers de définition des pins intact. C'est pour ça que j'ai fait l'a ajout ici: #define TEMP_SENSOR_0 1 #define TEMP_SENSOR_1 0 #define TEMP_SENSOR_2 0 #define TEMP_SENSOR_3 0 #define TEMP_SENSOR_4 0 #define TEMP_SENSOR_5 0 #define TEMP_SENSOR_6 0 #define TEMP_SENSOR_7 0 #define TEMP_SENSOR_BED 1 #define TEMP_SENSOR_PROBE 0 #define TEMP_SENSOR_CHAMBER 0 #define TEMP_SENSOR_COOLER 0 #define TEMP_SENSOR_BOARD 0 #define TEMP_SENSOR_REDUNDANT 0 #define TEMP_BED_PIN 15 // Analog Input Pour le TEMP_1_PIN, tu peux laisser inchangé puisque tu n'as qu'1 extrudeur, le firmware ne cherchera pas à jouer avec cette entrée1 point
-
ça se passe où dans le Marlin pour trouver le fichier de config du cablage ? (j'ai réussi à ouvrir les fichiers du Marlin avec Visual Studio Code, mais après j'ai cherché mais pas trouvé. C'est la première fois que j'ouvrir les fichiers de conf de Marlin...) Je pense avoir localisé quelque chose qui correspond... Je suis allé chercher le fichier pins_MKS_GEN_L.h qui a l'air de faire appel au fichier pins_RAMPS.h Il y a une section Temperature Sensors. Je retrouve bien le TEMP_BED_PIN défini sur le pin 14, ce qui a l'air de correspondre au schéma de la mks gen L. Du coup, il faudrait que le placer sur le 15. C'est bien ça ? Mais que faire du TEMP_1_PIN qui lui est déjà défini sur le pin 15 ? (cf image). J'espère que je suis sur la bonne piste ! Merci d'avance !
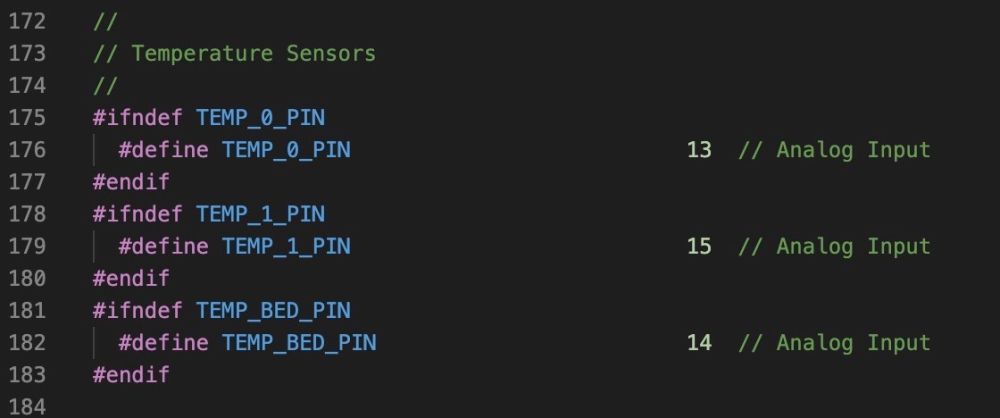 1 point
1 point -
Bon Halloween !
 1 point
1 point -
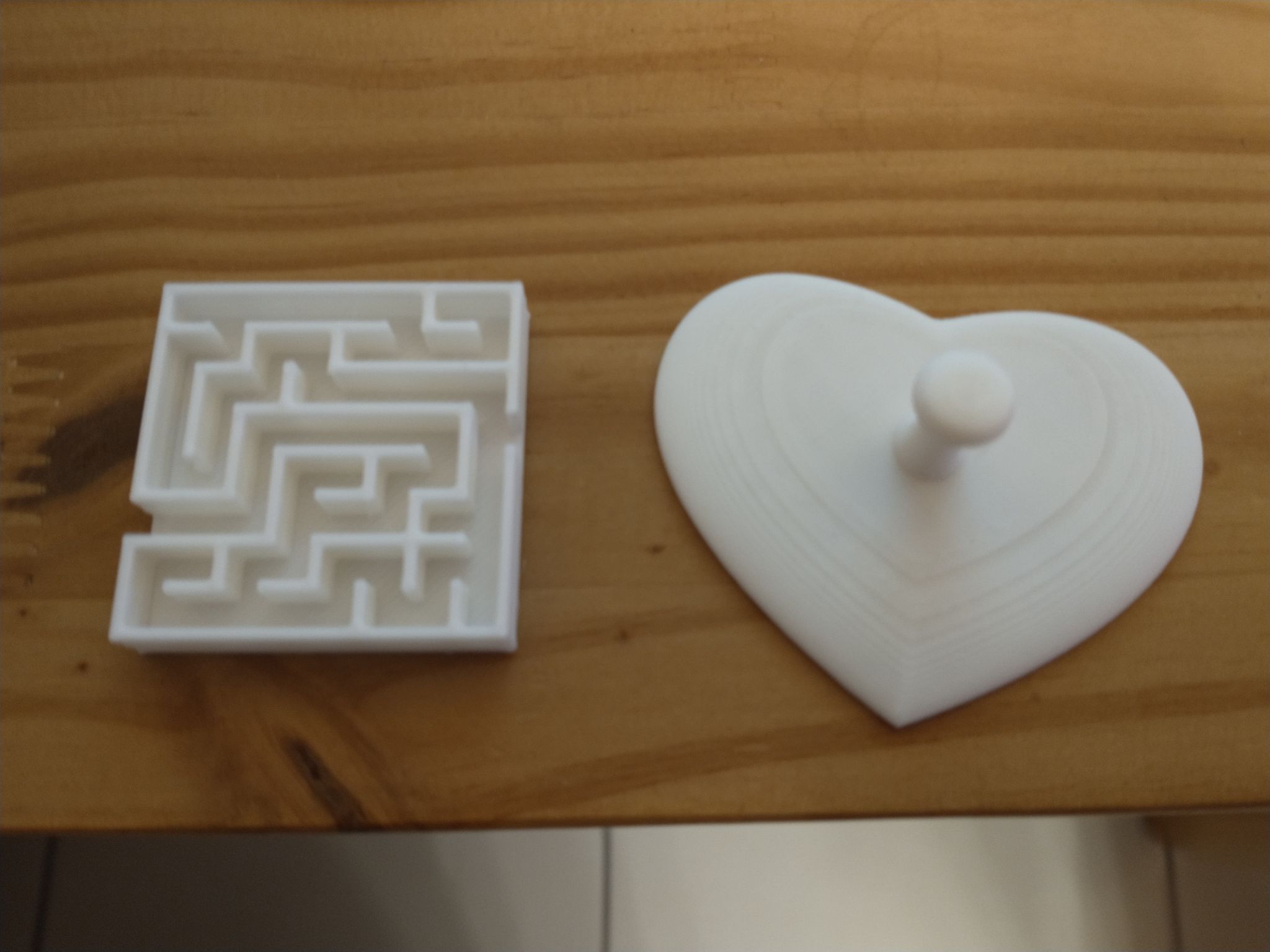
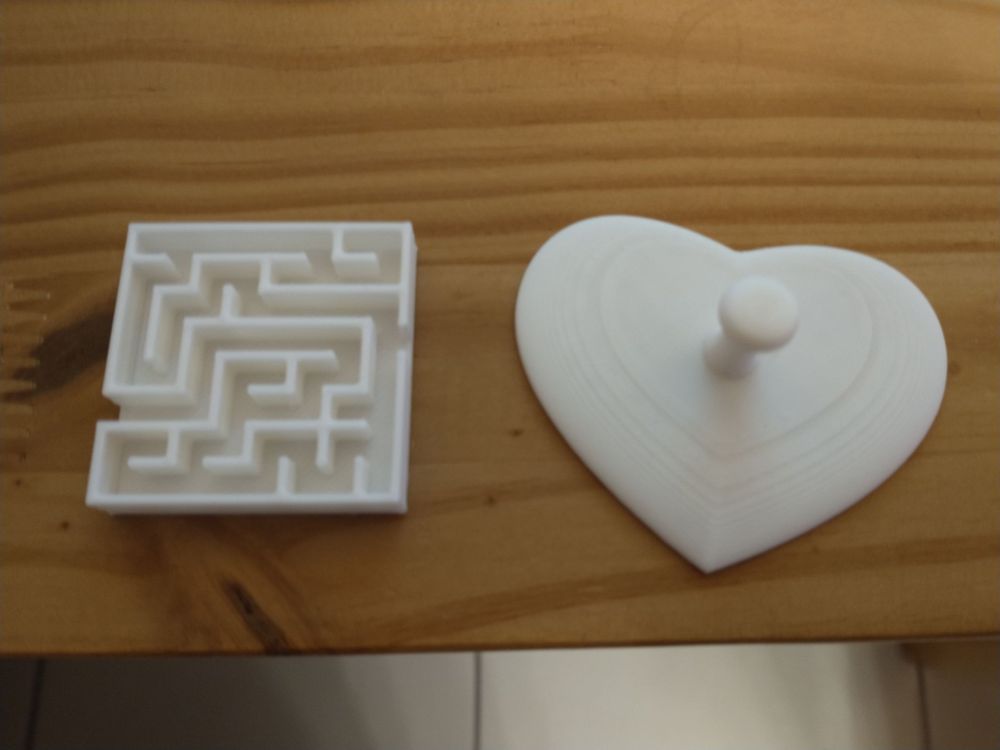
Bonjour à toutes et à tous. Je vais juste donner mes premières impressions sur ma machine Ender 3 V2. Montage de la machine facile avec vidéos sur Youtube. La doc livrée, comme celle sur le site Creality (c’est la même), est quasiment inutilisable. A changer rapidement : les ressorts d’origine sous le plateau pas suffisamment raides, même que je vais aller plus loin en montant des ressorts en silicone. Pas cool de devoir faire et refaire le nivellement du plateau tous les 4 matins. D’ailleurs, je viens de remarquer que la nouvelle imprimante « Ender-3 V2 Neo » en est équipée d’origine. A changer rapidement : l’extrudeur Bowden en plastique par un ensemble en alu bien plus costaud. Sur ma machine le levier en plastoc est arrivé cassé (bravo les mecs !). Pareil la « Ender-3 V2 Neo » l’intègre à l’origine. J’ai bouffé la buse au bout de 4 impressions, sans compter celles que j’ai loupé, à force de mal régler la hauteur du plateau (qui est maintenant légèrement rayé). Comme disait un de mes profs : un débutant c’est fait pour débuter ! Le changement de la carte mère, c’est en cours. J’ai même acheté 2 ventilos pour entendre la différence s’il y en a une. Le bruit d’origine n’est pas infernal mais à la longue ça tape un peu sur les nerfs. J’ai eu du mal à comprendre comment régler la hauteur du détecteur niveau bas. En fait avant de régler la position de ce détecteur, je pense qu’il faut serrer les vis des ressorts du plateau limite spires jointives pour avoir de la marge lors du réglage en hauteur tout en conservant une pré contrainte suffisante sur ces ressorts pour ne pas tout dérégler à chaque fois que l’on touche au plateau. NOTA : la « Ender-3 V2 Neo » possède un auto levelling (elle est pas belle la vie ?) ; reste à voir si je ferais cette modification. J’ai commencé par imprimer un truc facile : un labyrinthe de 8 x 8 cm, modèle livré sur la carte SD de la machine. Après avoir maintes fois réglés le plateau, j’ai fini par comprendre qu’il valait mieux faire chauffer la machine pour du PLA et ensuite faire déplacer la buse avec l’écran. Résultat pas mal du tout. J’ai ensuite imprimé un couvercle en forme de cœur, modèle lui aussi livré sur la carte SD : résultat pas mal du tout. J’ai modélisé une gâchette (cassée) de pistolet à peinture (pièce injectée en plastique) pour un pote et j’ai fait une première impression. Résultat, je suis allé trop loin dans la modélisation et du coup la pièce est complexe à imprimer. En plus j’avais oublié d’intégrer des supports. Donc j’ai repris mon modèle pour le rendre plus fonctionnel que proche de l’original. Tout savoir sur la Ender-3 V2 Neo : https://store.creality.com/products/ender-3-neo-3d-printer?official-website-banner-ender3neo=&spm=..index.slick_image_1.1 https://www.lesimprimantes3d.fr/comparateur/imprimante3d/creality-3d/ender-3-v2-neo/ Elle coûte actuellement 370€ donc + 170€ par rapport à ma Ender non neo achetée début 2022 ! Dès que je me pose une question, je viens sur le forum et jusqu’à maintenant j'ai toujours trouvé une ou des réponses, c'est vachement bien. Merci !
 1 point
1 point -
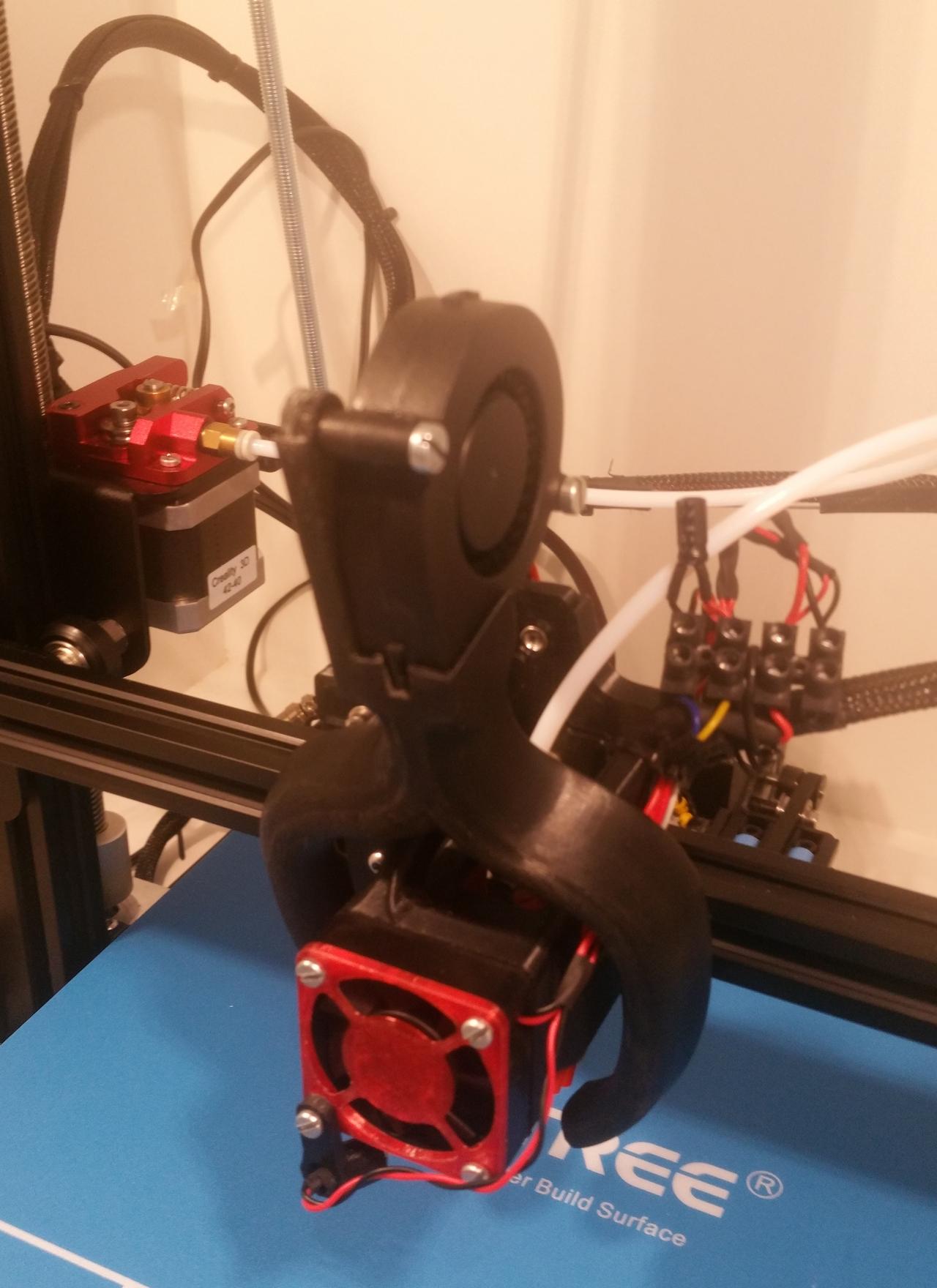
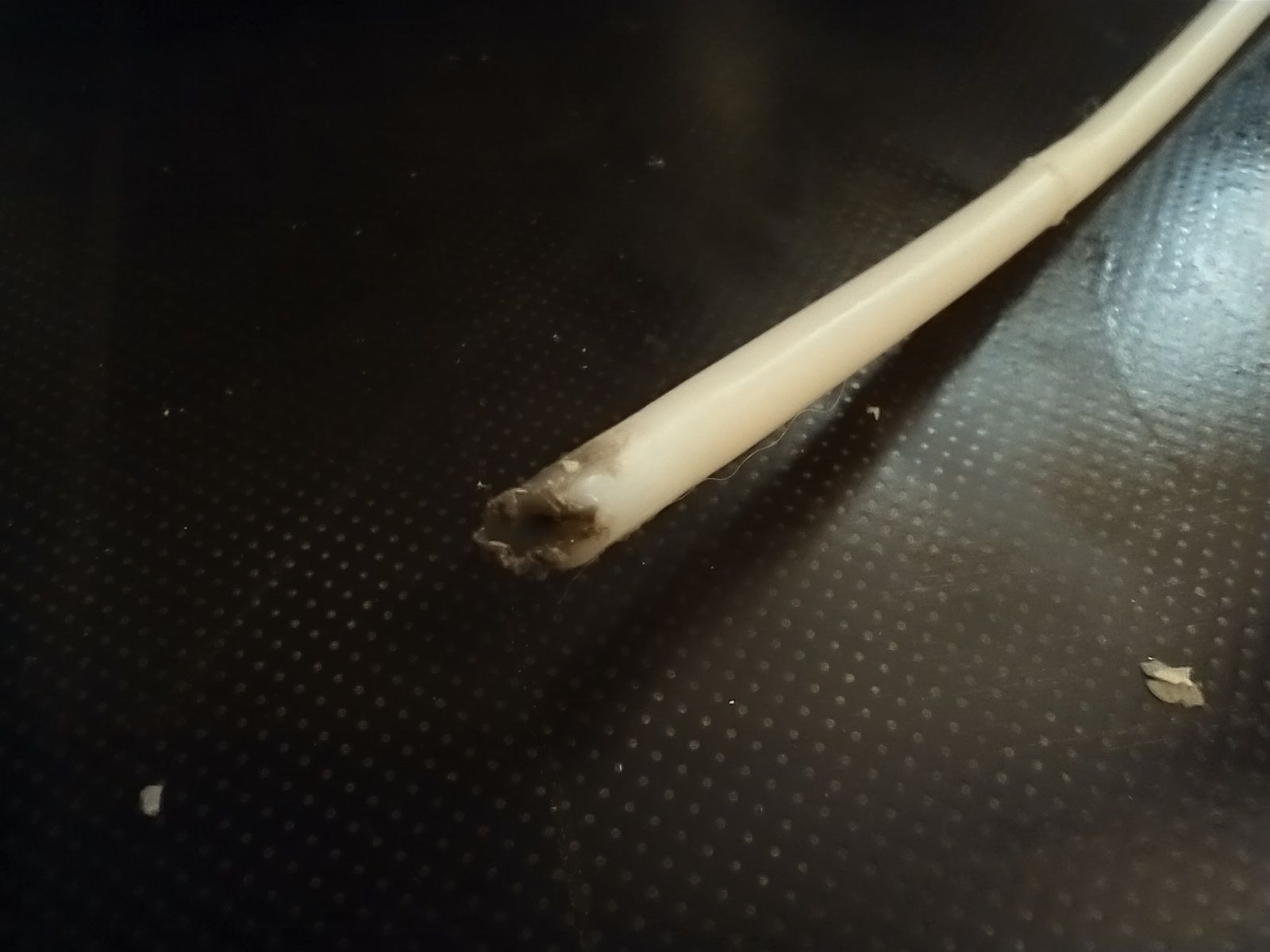
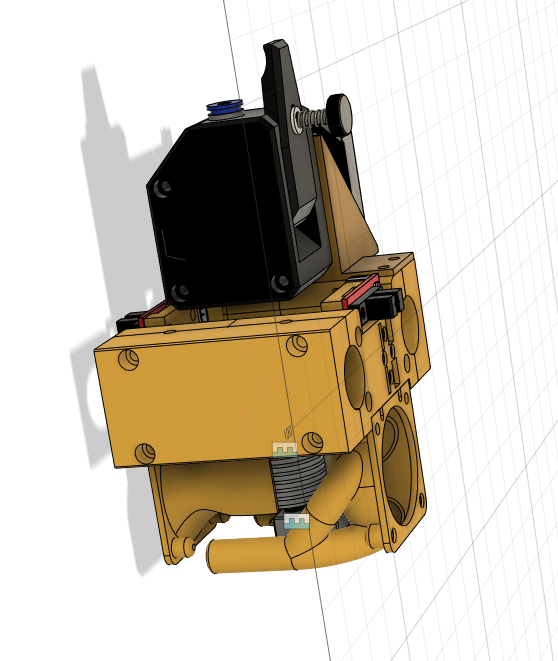
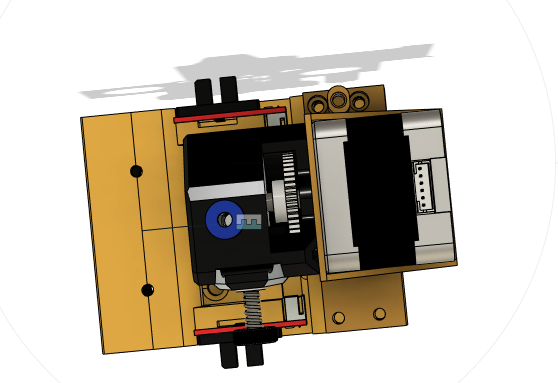
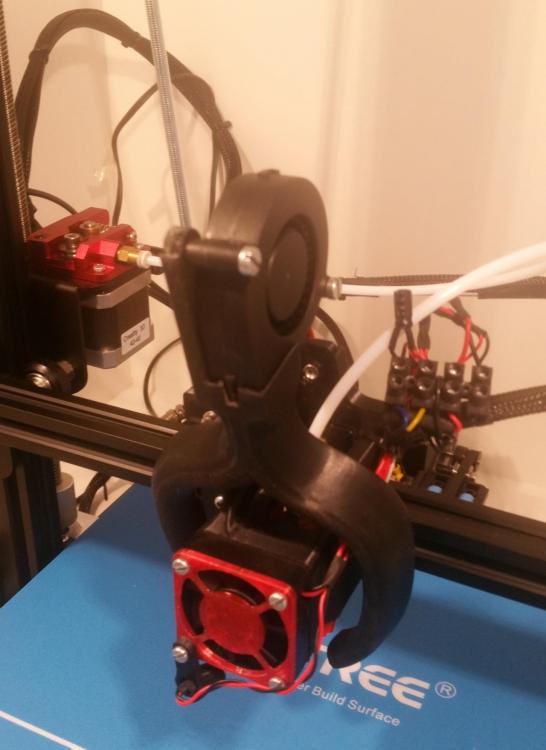
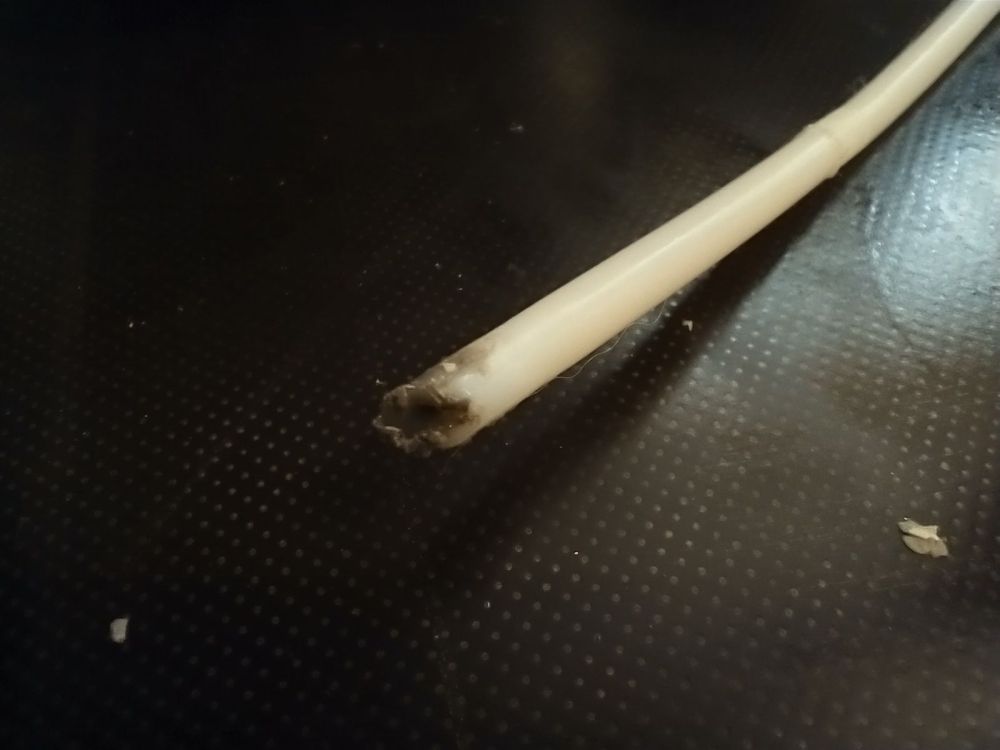
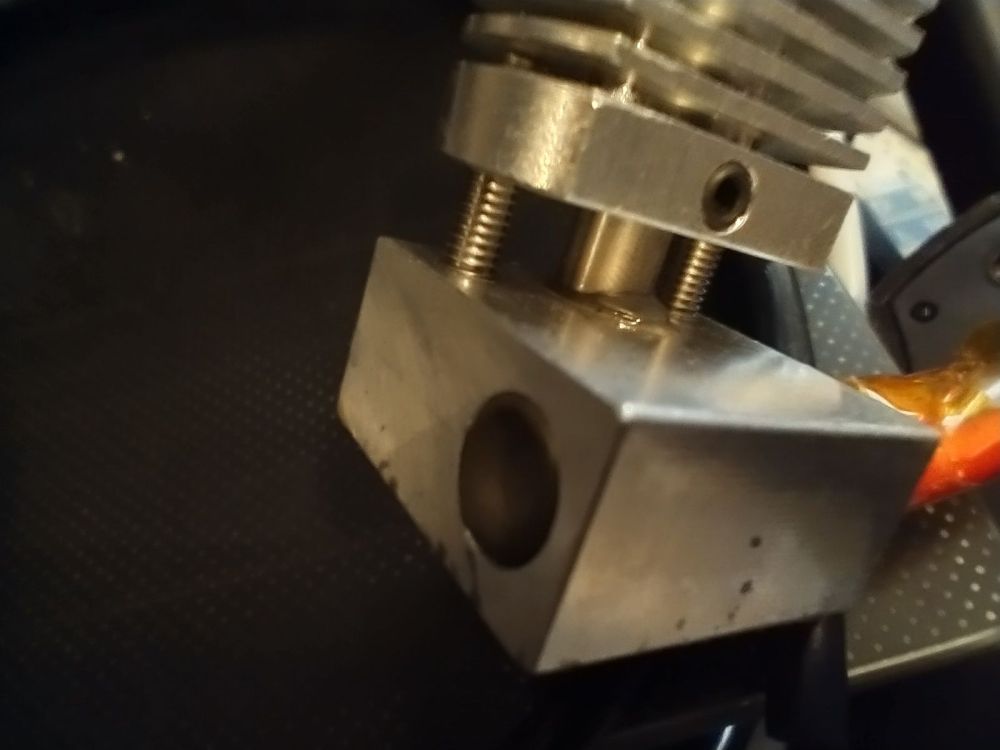
Modifications : Extrudeur en alu c’est le jour et la nuit (forcément puisque celui d’origine était arrivé cassé) ! Pour info, j’ai acheté ce kit : https://www.amazon.fr/gp/product/B07TWK8FRN/ref=ppx_yo_dt_b_asin_title_o07_s01?ie=UTF8&psc=1 Ressorts acier peints en jaune remplacés par des plots en silicone, c’est que du bonheur Laque sur le bed, c’est mieux car ça évite les emmerdements dès le départ d’une impression Tube PTFE dans le hotend : le montage initial a été fait par un poseur de papier peint ! L’arrivée dans le hotend, au lieu d’avoir un tube coupé droit était coupé en biseau (voir photo) !! Donc au bout d’un certain temps le hotend était plein de PLA, les impressions ne ressemblaient plus à rien et il y avait des "cheveux" partout. Au passage, un grand merci à @Titi78 et @Fran6p pour leurs tutos très bien faits. Bref, lorsque tu achètes une machine neuve, tu prévois d’office de vérifier ce point avant de commencer à imprimer sinon tu vas t’arracher les cheveux au bout d’un certain nombre d’impressions. J’ai même cru que cela venait de mon extrudeur que j’ai démonté afin de le nettoyer. Du coup, démontage du hotend : - Le tube en acier est maintenant collé dans le corps de chauffe de la buse à cause du PLA qui a débordé. Pas grave cela ne gêne pas le fonctionnement. - J’ai nettoyé l’intérieur du tube en acier en utilisant un vieux foret D4 mm chauffé au briquet. Au bout d’un certain nombre de va et vient tout en tournant le foret, ça finit par le faire ! - Mise en place d’un tube en PTFE. C’était dans mon kit mais j’ai eu la flemme de le monter dès le départ - J’ai appliqué la méthode @Titi78 pour le remontage Jusqu’à maintenant je n’avais imprimé que des pièces « rigolotes » pour me familiariser avec la machine et aujourd’hui j’ai imprimé un cube de 20x20x20 mm. Il me manque 0.6 mm en hauteur donc "back to the forum" pour revoir l’axe Z (comme Zorr0) avec le topic suivant. Prochaine étape de modification, un montage de l’extrudeur en direct (UniTak3D Ender 3 Direct Drive). C’est un peu idiot ce montage d’extrudeur déporté, le fil ne rentre pas naturellement dans l’extrudeur même avec un guide déporté avec la bobine fixée sur le dessus de la machine. Et puis on perd pas mal de longueur de fil à chaque changement de bobine. https://www.amazon.fr/dp/B09KG8MMQ2/?coliid=I1URHLUI187Z34&colid=389AF8NQU9FRJ&psc=1&ref_=lv_ov_lig_dp_it NOTA 1 : la carte mère d’origine V4.2.2 est aussi bien que la V4.2.7, aucun intérêt de la changer. NOTA 2 : j’ai changé le ventilo de la carte mère mais cela ne change pas grand-chose au bruit. Ceux qui doivent faire le plus de bruit sont ceux du hotend et de l’alimentation. NOTA 3 : les buses en inox c’est d’la merde ! En plus, comme cela m’arrive souvent, je savais déjà que l’inox est un mauvais conducteur de chaleur. Mais bon, j’ai un côté saint Thomas. NOTA 4 : je passe un temps fou à lire le forum tellement il y a d’informations à digérer (blurps). NOTA 5 : et encore MERCI aux gens du forum parce que sans eux, je pense que beaucoup de gens auraient abandonné leur machine à la déchetterie ou dans le jardin de leur belle-mère, même si ce n’est pas leur truc de poster !
 1 point
1 point -
La carte des CR6-SE est pour les plus anciennes une v4.5.3 ou la ERA_V1 1.0.3 il me semble (sur la mienne en tout cas c'est la 4.5.3). La SKR CR6 de Bigtreetech est difficilement trouvable (pas trouvée en tout cas) mais celle de Creality se trouve en vente, neuve, en ligne : Chère ici ou plus abordable là1 point
-
Ici pour le support ADXL pour la SR : https://www.printables.com/model/245136-adxl345-mount-for-flsun-super-racer1 point
-
Ah mais j’ai loupé que le bed était froid1 point
-
Salut, j'ai eu le même soucis une fois, mais juste après l'installation de Mainsail+Klipper, le Raspberry était bien reconnu par ma box mais impossible de m'y connecter. (ID et MdP étaient bien configurés au préalable) J'ai rajouté un câble Ethernet de ma box au Raspberry, je me suis connecté à Mainsail avec l'adresse IP par câble Ethernet. Après ça, (toujours avec le câble Ethernet de branché) je me suis connecté à Mainsail avec l'adresse IP par Wifi. Et enfin j'ai débranché le câble Ethernet, et ça n'a plus posé problème. A savoir que tu utilises un smartphone comme routeur Wifi, essaie en passant uniquement par ta box si possible pour confirmer que ton routeur smartphone n'est pas le soucis.1 point
-
Des gremlins ?1 point
-
@smiley & @pixeldesbois je commencer a avancer sur l'ADXL345, j'ai configurer MainsailOS pour la prise en compte de l'accéléromètre, j'ai souder les pin sur l'ADXL345 et mis sur le support que tu m'avais mis en liens Pixel c'est adapter pas de soucis. J'ai juste du commander ce matin des cables et fiche dupont j'avais rien qui allait chez moi sous la main ce week end. Du coup je recois les cable et fiche je sertie mon cable dans la semaine et après je branche l'ADXL345 au Pi et c'est partir pour les test de fonctionnement et la calibration de input shaper si tous est ok. Normalement Ce Week end je devrais pouvoir vous mettre un mini tuto pour cette partie.1 point
-
Salut, Comme beaucoup l'ont déjà indiqué : Il n'y a pas de solution miracle. Après... il serait utile d'indiquer de quel ventilo tu souhaite réduire le bruit. En fonction du ventilo... il y a ou non des alternatives et des solutions. Il y a des tas de choses qui ont été tentés sur le forum : 1. Monter un silencieux sur le ventilo de la hotend ( Mais non disponible pour la Ender 3 V2) > le problème c'est que cela réduit le débit d'air du ventilo et donc son refroidissement. Risques de provoquer des bouchons... 2. Monter un silencieux sur le ventilo de l'alimentation. > Sans danger pour l'alimentation et réduit considérablement le bruit du ventilo de l'alimentation. 3. Remplacer par un ventilo "plus silencieux". > ce n'est pas les sujets qui en traite qui manque... mais attention ! Tout les ventilos ne sont pas forcément bon (certains ventilos prévu pour PC, ne sont pas adaptés à cet usage). 4. Si le bruit viens de la Hotend, possible de changer pour un modèle qui offrira plus de silence... comme celui-ci : https://www.thingiverse.com/thing:4223929 > Mais cela à un coût... Si le bruit viens du ventilo du boitier : Opter pour un silencieux... simple, rapide à monter et efficace, comme celui-ci : https://www.thingiverse.com/thing:2935204 Si le bruit des ventilos est dû aux vibrations de ces ventilos... il est possible de monter les ventilos sur des joints torique (M3) qui viendront amortir les vibrations... et donc le bruit. C'est efficace, sans danger... et peu chère, mais effet de réduction du bruit limité. Crois-moi... si je te dit que j'ai personnellement essayer chacune de ces solutions... que cela soit sur feu ma CR-10, sur mon ancienne Geeetech A10, et sur mon actuelle Ender 5 Plus. Pour la Hotend... les joints toriques... c'est la meilleure, la moins onéreuse et la plus sûre des solutions. Si c'est la turbine et toute la tête... en changer est une solution... mais attention c'est du "customing", avec les risques que cela peut comporter. Pour tout les ventilos autre que la Hotend, le silencieux est la meilleure solution. Voilà... à toi de voir...1 point
-
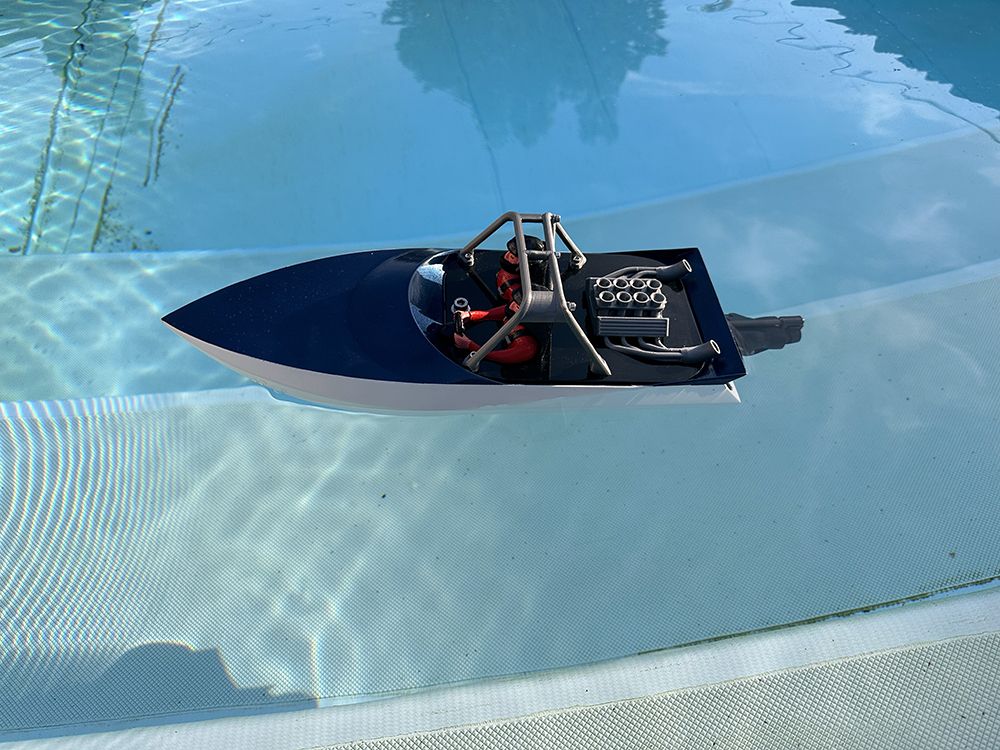
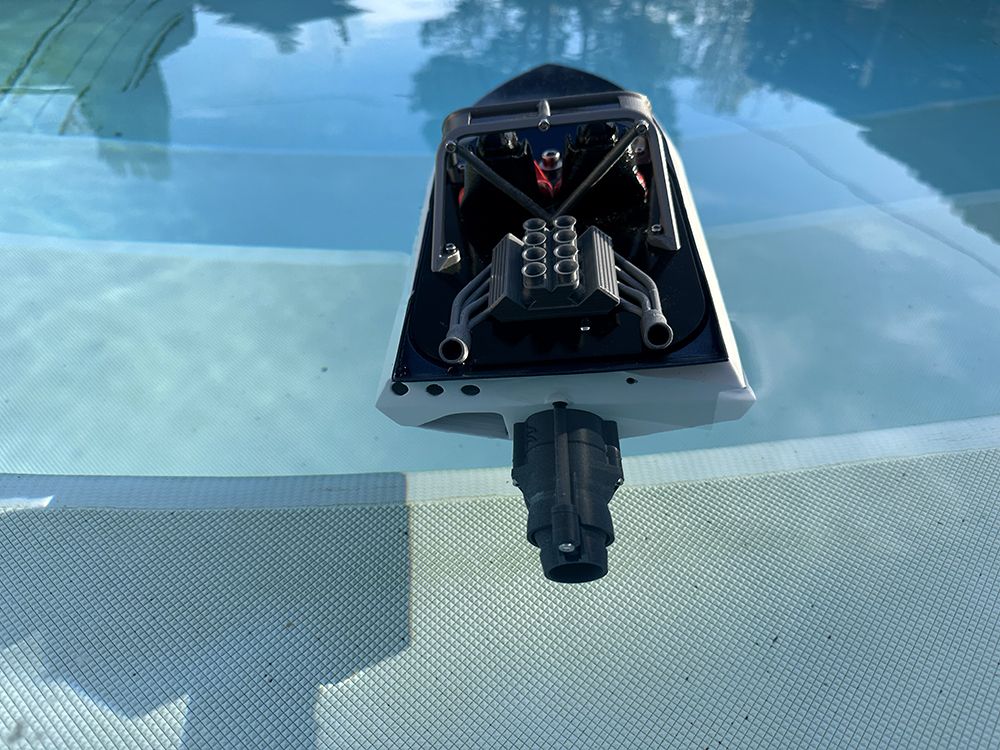
J’ai envoyé un mail au concepteur du bateau et j’attends une réponse, mais je me suis contenté de reproduire ce qu’il a fait et j’ai utilisé les mêmes composants que lui. D’après les vidéos que j’ai vus, il n’a pas l’air d’avoir ce problème et sur le site Internet où j’ai acheté les fichiers, personne n’a mentionné ce problème. C’est vrai qu’en dehors de la batterie qui se trouve plus sur l’avant du bateau, tout le reste est à l’arrière. A+++ Bon, je pense que ce bateau à un problème de conception et le caisson de retournement qui devait nous sortir d’une mauvaise position fait l’effet contraire et couler le bateau après qu’il se soit rempli d’eau ! J’ai regardé plusieurs fois la vidéo réalisée par le concepteur du bateau et il ne reste jamais en statique et il me semble que le peu de temps où il est à l’arrêt, il penche également de l’arrière gauche. Par contre, je n’ai pas essayé de le mettre à l’envers pour voir s’il se retourne, mais sur la vidéo du concepteur, ça fonctionne. Ci-dessous, deux photos du bateau SANS la batterie et il est déjà limite à l’arrière gauche ! Ensuite, j’ai installé la batterie en la positionnant le plus possible vers l’avant du bateau ainsi que le récepteur radio et voilà ce que ça donne sur la vidéo ci-dessous ! En utilisation normale, l’étanchéité du couvercle est peut-être suffisante, mais là, c’est une vraie passoire et l’eau rentre en grande quantité dans le bateau. Le Titanic en action : A+++
 0 points
0 points -
Bonjour, Je viens de terminer l’assemblage de mon bateau, mais même s’il est beau, il a un gros problème......... il coule !! J’ai pourtant utilisé les mêmes composants que l’auteur, mais quand je le pose sur l’eau, l’arrière s’enfonce énormément dans l’eau, surtout à gauche et ensuite il se met à la verticale et coule !! Et comme si ce n’était pas suffisant, le couvercle n’est pas étanche !! Autre désagrément, j’ai l’impression que mon ESC est prévu pour une radio à manche alors que j’ai une radio à volant. J’ai pourtant suivi le mode d’emploi pour paramétrer mon ESC, mais je suis obligé de maintenir la gâchette appuyée à fond pour que le moteur ne tourne pas et de pousser vers l’avant pour accélérer. La position neutre ou normalement le moteur ne tourne pas, ça correspond à environ la moitié de la puissance et si je pousse la gâchette en position freinage ou marche arrière, je suis à pleine puissance !! Voilà, après des semaines de travail et d’attente, c’est une grosse déception et je ne sais pas ce que je peux faire pour régler tous ces problèmes. Quelques photos pour voir l’engin fini. A+++0 points