
Classement




Contenu populaire
Contenu avec la plus haute réputation dans 17/05/2023 Dans tous les contenus
-
Salut à tous, Y a ça aussi: Faisons simple ...5 points
-
Salut à tous, Un cours gratuit sur Fun Mooc: programmer un objet avec micropython Je suis loin d'être un pro mais je vais m'y inscrire ...2 points
-
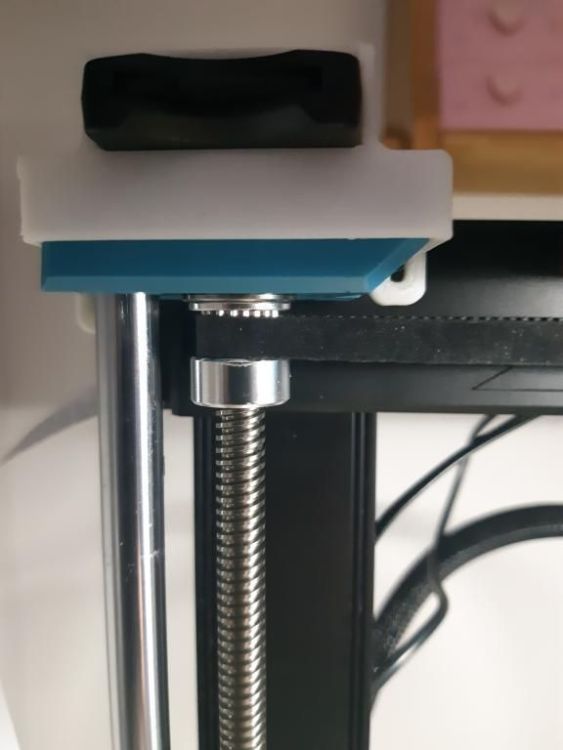
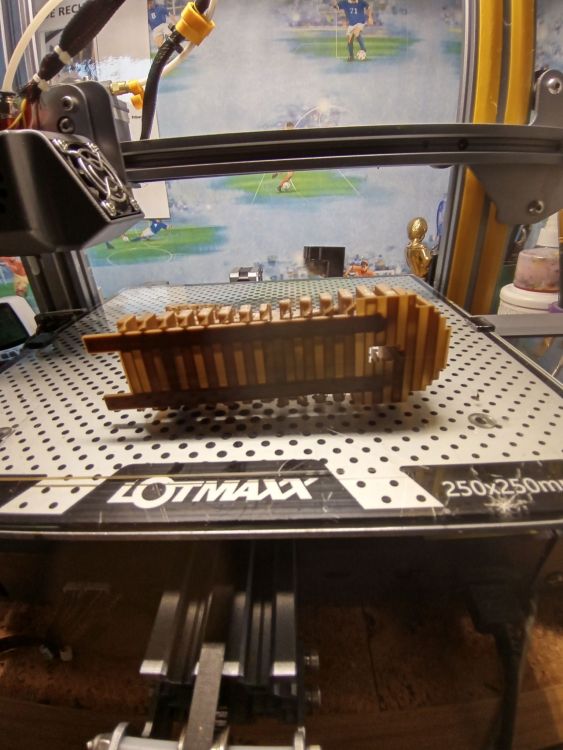
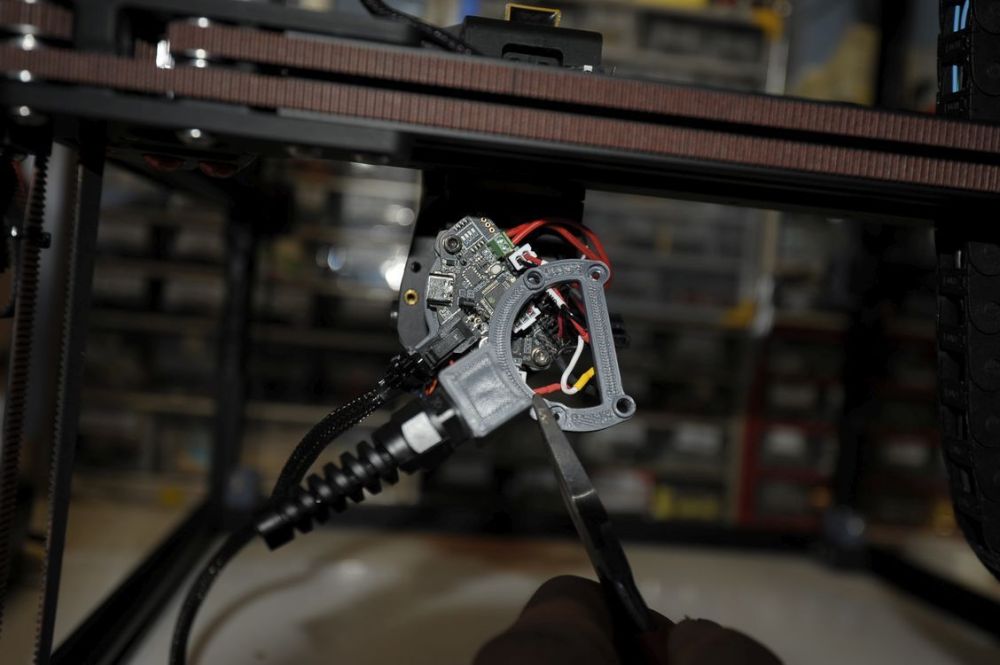
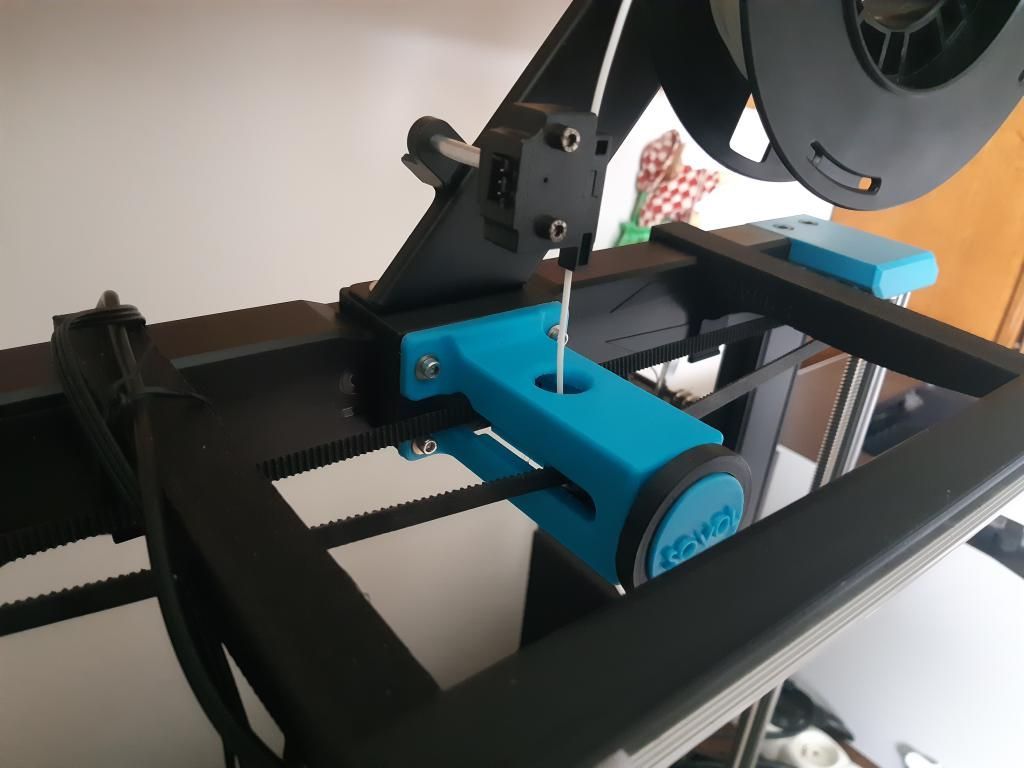
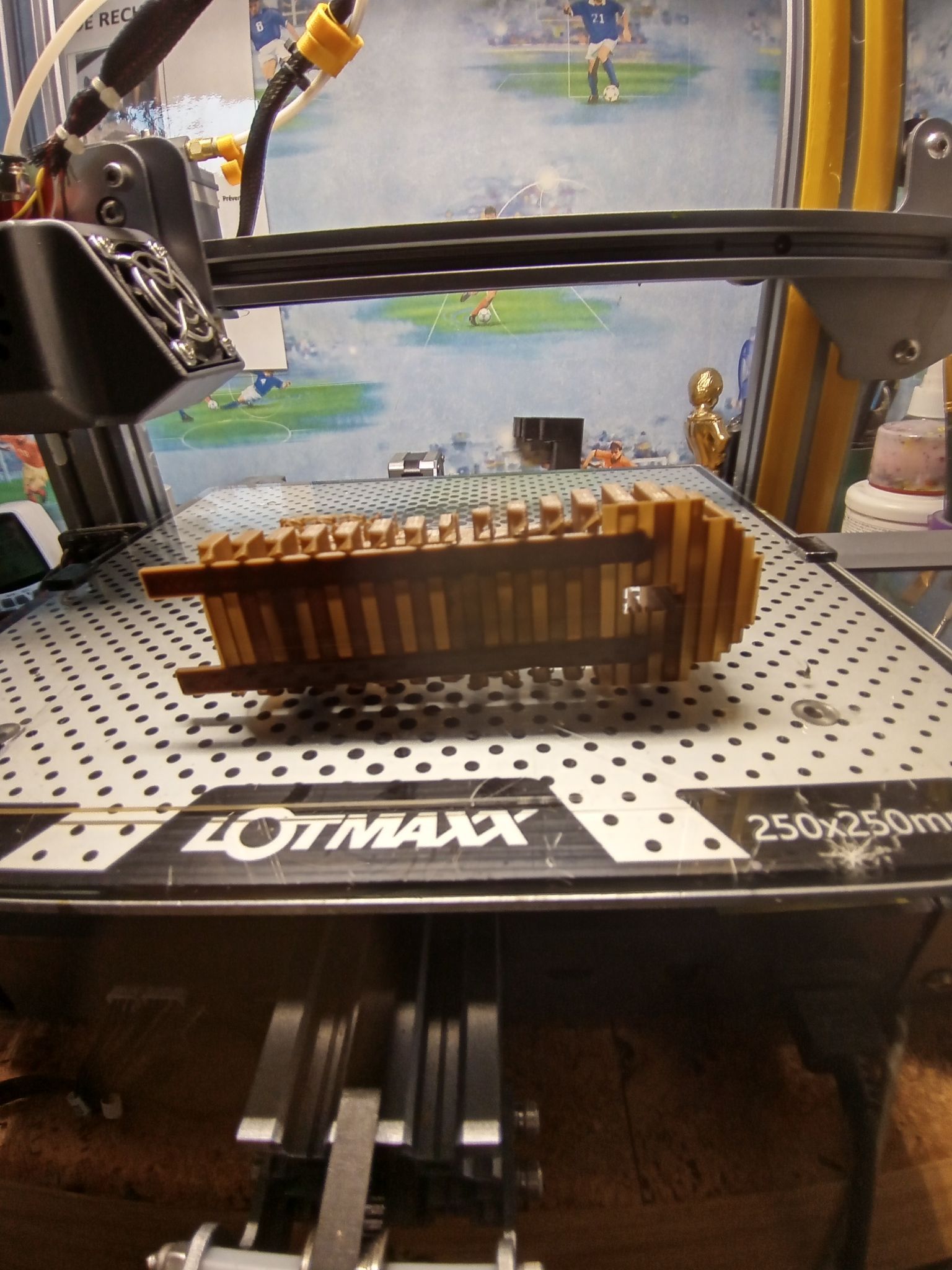
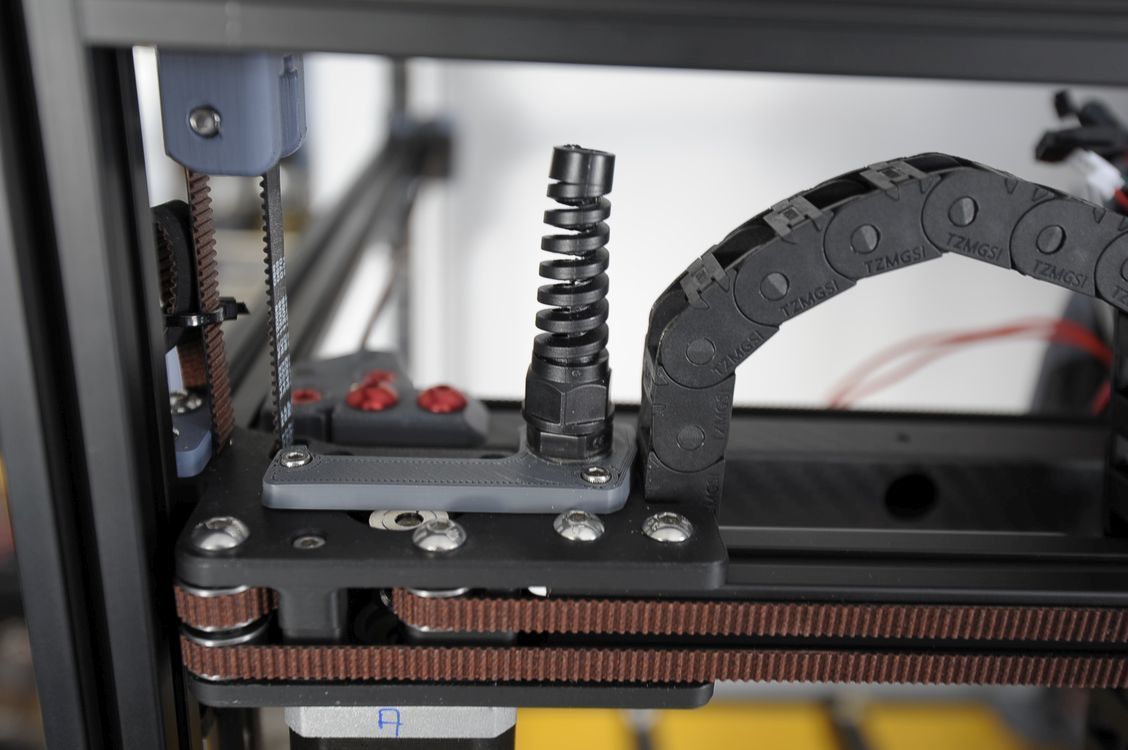
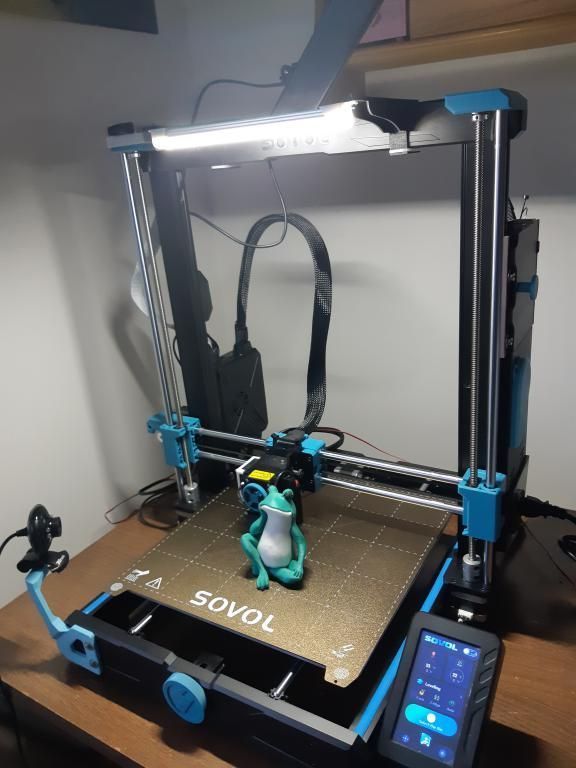
hello, le montage de la synchronisation des axes du Z est terminé. Le montage est facile il reprend l'ablocage du support de la bobine. Une platine permet de maintenir le tendeur avec 4 vis M3 Deux poulies de synchro prennent place sur les vis du Z, une troisième poulie permet de tendre la courroie. J'ai fait des test dynamiques tout fonctionne très bien. Nota : en prenant appui sur le coté gauche de l'axe X le guidage ne descend plus sous la force de la gravité et du poids de l'ensemble moteurs arrêtés. J'ai vérifié la cote des cotés gauche et droit de l'axe X la distance ne varie pas c'est parfait. Le but c'était de retrouver un nivellement sans variation de la planéité parallèle entre le BED et l'axe X . Conclusion c'est un dispositif qui permet de maintenir un leveling parfait car avec le montage d'origine çà bouge un peu. C'est bien connu l'axe des Z font ce qu'ils veulent la solution idéale serait une détection optique sur les axes des Z gauche et droit. A+
 2 points
2 points -
Un peu comme ça ...bien plus facile à imprimer
 2 points
2 points -
bonjour , on arrête pas le progrès pour moi ils ont réussi à faire rentrer dans la boite un petit chinois qui s'occupe de tout !! faut avouer ; ils sont forts ces chinois2 points
-
Pas d'impression 3D mais je me suis bien amusée



 2 points
2 points -
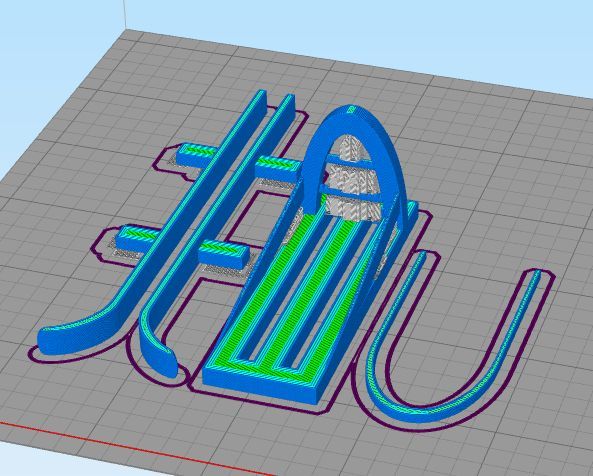
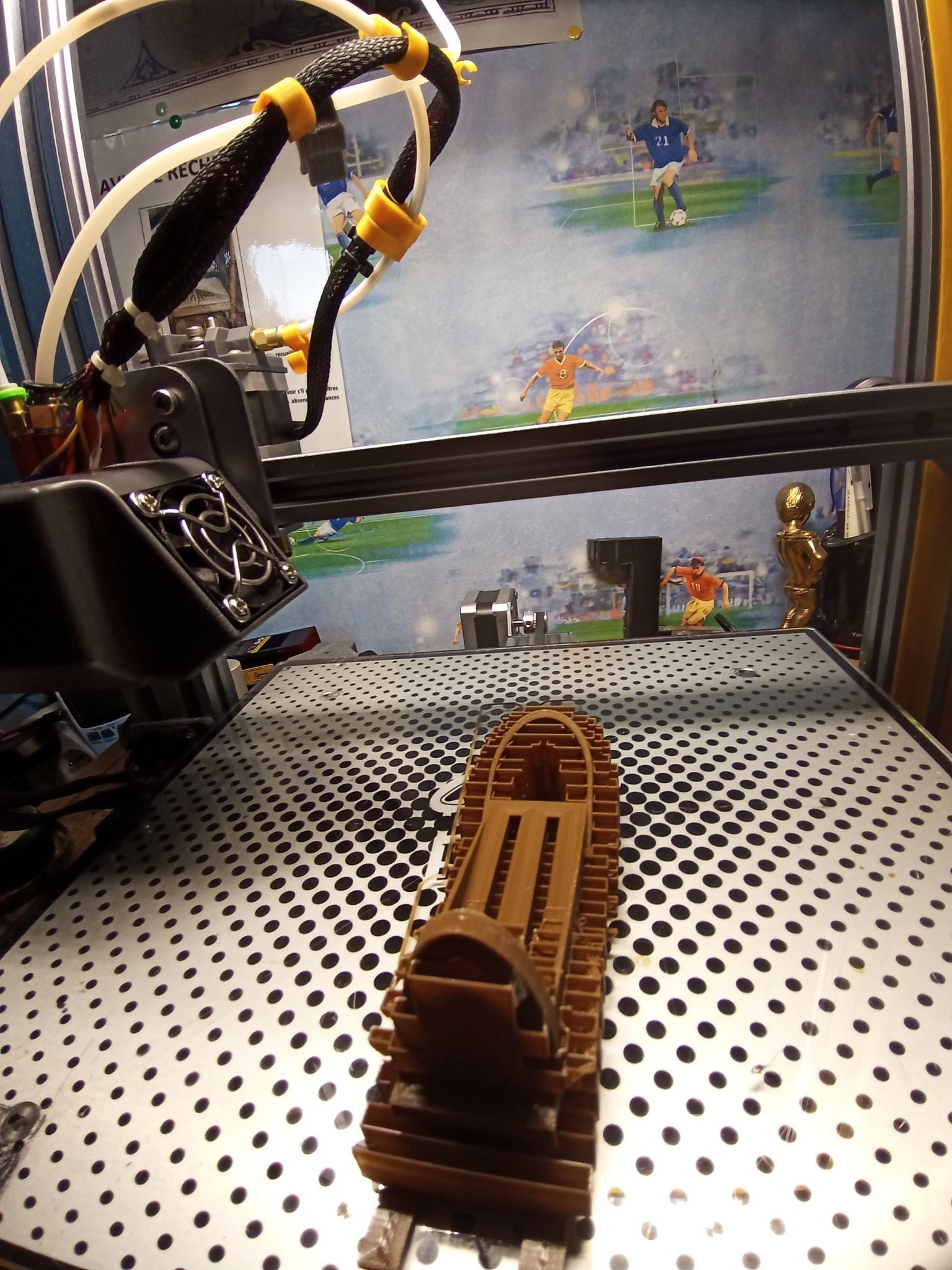
Pour faire simple et solide, j’imprimerais cette pièce en quatre parties. - les patins avec les premiers montants - le siège à plat - l’arceau à plat le tout collé (presque comme un vrai)2 points
-
Bonsoir après pas mal d'essai finalement j'y suis presque encore Merci
 2 points
2 points -
Bonjour à tous, Je viens sur ce bolg car j ai lu ici qu une cane avait trouvée une super équipe pour lui confectionner une prothèse de patte. J ai fait naître à la maison 4 canards coureur indien, l un d entre eu à eu du mal à sortir de sa coquille ( il était collé, et j ai du l aider) il a 1 mois aujourd'hui et ne tient toujours pas debout, une de ses patte est recroquevillée et faible. Du coup il tombe sur le dos et pédale dans le vide. Mais il est voyant. J essaye de le maintenir avec des bandages, je lui fais de la rééducation pour fortifier sa patte, mais rien n y fait, ses doigts ne tiennent pas a plat seuls. J ai vu quelques vidéos de canards avec des prothèses et cela me semble concluant. Problème, je n en ai pas.... si quelqu'un pouvait m aider... merci d avance.1 point
-
Salut, oui. Le nouveau firmware est également basé sur Marlin. Par contre, c'est rarement une bonne idée d'imprimer sous windows en USB. En tous cas, via Cura, tu auras de grands risques que l'impression s'arrête avant la fin ...1 point
-
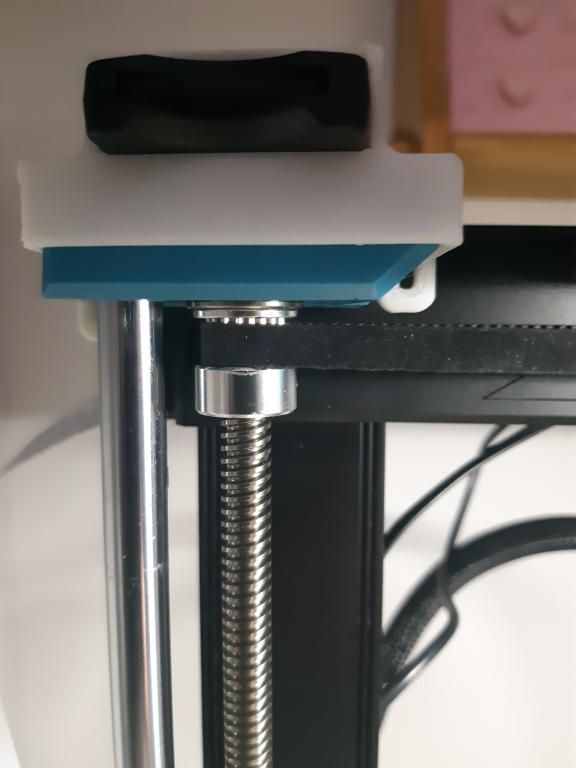
Réglage du Leveling SV06 plus avec une courroie de synchronisation step -1 réaliser deux cales de mêmes hauteur pour avoir une référence bien // par rapport au BED (tendre la courroie modérément avec le bouton Sovol) "les boites à soupes fonctionne bien aussi"step -2 (par petite descente progressive en 0.1mm tangenter la première cale à droite (la cale doit glisser sans contrainte sous la première barre de l'axe X) step -3 couper l'alimentation des moteurs conserver la poulie synchro de droite qui est abloquer celle de gauche sera libre (la cale de droite ne doit pas bouger) step -4 placer la cale à gauche de la barre de l'axe X jouer manuellement pour tangenter avec la cale pour monter avec précision en tournant sens horaire, pour descendre sens anti-horaire. (le déplacement est très sensible.) step -5 Bien vérifier que les deux cales tangentent de la même façon. Ensuite mettre sous tension les moteurs des Z ensuite bloquer les deux vis de la poulie de gauche en s'assurant que rien ne bouge en rotation. step -6 enlever les cales, faire un home et réaliser le Z offset avec la cale de papier 0.2mm suivi d'un leveling 25 points Attention de faite surtout pas le le calage auto qui fait monter les axes du Z en butée haute. Il existe une méthode de calage à la Texas qui consiste à utiliser deux "boites à soupes comme cales" çà fonctionne aussi... deux boites de ravioli qui vont bien, c'est pour traduire pour MICH0111. Pour pinailler au max j'ai pris mon trusquin numérique et j'ai un écart pour l'axe X de 0.02mm entre la gauche et la droite après avoir imprimé un cube test. Conclusion le niveau du leveling ne bouge plus mécaniquement moteurs Z arrêtés. Je publierai un dossier sur Thingiverse ou ailleurs. ce montage garantie un maintien du niveau mécanique quand les deux moteurs sont arrêtés c'est l'essentiel. le top serai de placer une détection optique comme sur la TLD3 Nota mon BE peut répondre à toutes les questions a+
 1 point
1 point -
Je viens de voir le Kickstarter "Athena mSLA Resin 3D Printer - The Smart Resin 3D printer with Advanced Force Sensor Systems to Improve Speed and Reliability." https://www.kickstarter.com/projects/concepts3d/athena-msla-resin-3d-printer/description qui a donc un "capteur de force" Je me dit que c'est probablement le même principe sur la M5s. ( Mais rien ne laisse penser qu'il y aura la vu avec graph "d'effort" sur la M5s pour le moment ) Pour les spécifications de la M5s je suis perplexe... Quand je calcul le rapport ( longueur / nombre de pixels ) cela ne colle pas vraiment ... sauf si les pixel ne sont pas carrés... donc pour un écran de 218x123 mm il faudrait plutôt une résolution de 11520x6480 pixel pour trouver du 19 microns D ( en mm) Nb pixels D / (Nb pixels) L 218 11520 0,0189 P 123 5120 0,0240 P 123 6480 0,0190 Et https://www.anycubic.com/products/photon-mono-m5s?variant=43292051701922 me dit que le 19 microns c'est donc seulement pour l'axe X. me dit que c'est 200 mm de hauteur d'impression.1 point
-
top merci c'est pile ce qu'il me faut1 point
-
Salut, L'excellent tuto de @stef_ladefense te permettra sans doute de parvenir à tes fins:1 point
-
je pense que la hauteur Z est plutôt de 218 mm , à voir . 19 microns de résolution , c'est bien ,mais est ce vraiment utile ? la vitesse c'est bien, mais avec une telle résolution horizontale ,il faudrait imprimer avec des couches de 20 microns pour avoir la meilleur impression .ce qui augmente le temps d'impression. le réglage "automatique" du plateau , pourquoi pas , mais une fois fait qui y retouche à tout bout de champ ?? le volume de résine nécessaire peut très bien s'évaluer avec les slicers il vaudrait mieux s'assurer de la planitude du plateau . de plus il vaudrait mieux orienter son attention sur la qualité des résines car avec une résine bas de gamme ,la variation volumétrique lors de la solidification est telle que l’intérêt des 19 microns en xy et même Z me semble dérisoire. le Z a 20 microns demande aussi un moteur pas a pas de bonne qualité , est ce le cas ? voila ce que j'en pense1 point
-
Dommage le "Sonic Pad" n'est plus disponible dans la boutique cadeau de Creality Cloud ... Donc j'ai décidé de dépenser une grosse partie des "cuvacoins" que j'avais accumulé ... Je vous dirais ici quand j'aurais des nouvelles de tout cela
 1 point
1 point -
bonjour a tous , je déterre le sujet on peux s'en fabriqué une sois même sont créateur donne tout pour la faire elle est open source pour se qui son intéressé lien si dessous https://github.com/Lite3DP/Lite3DP-S11 point
-
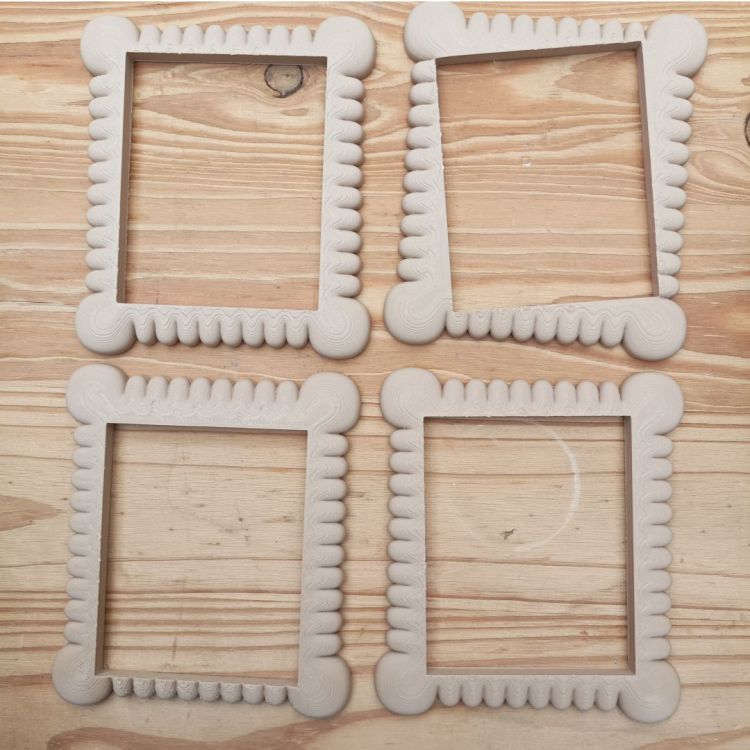
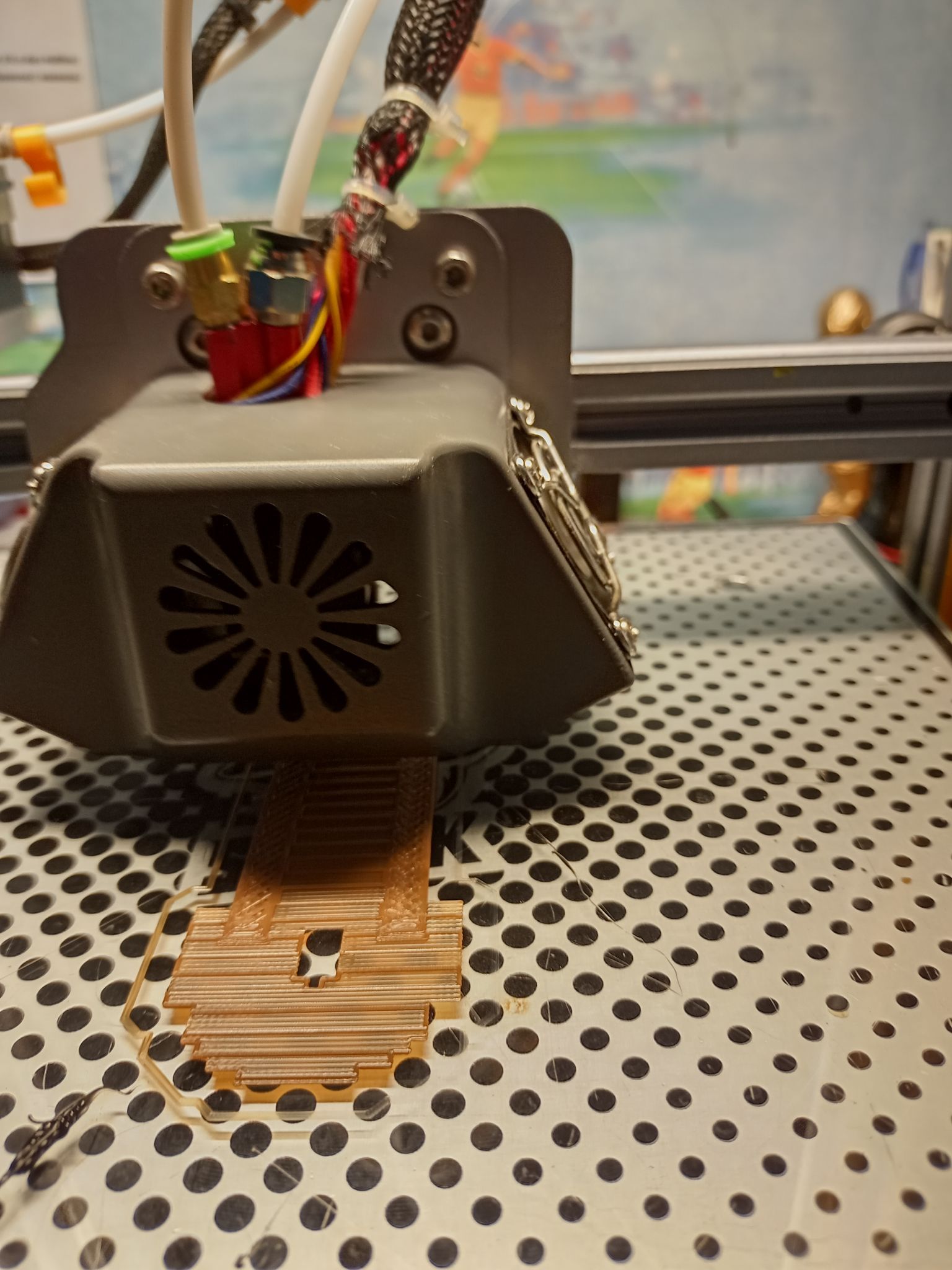
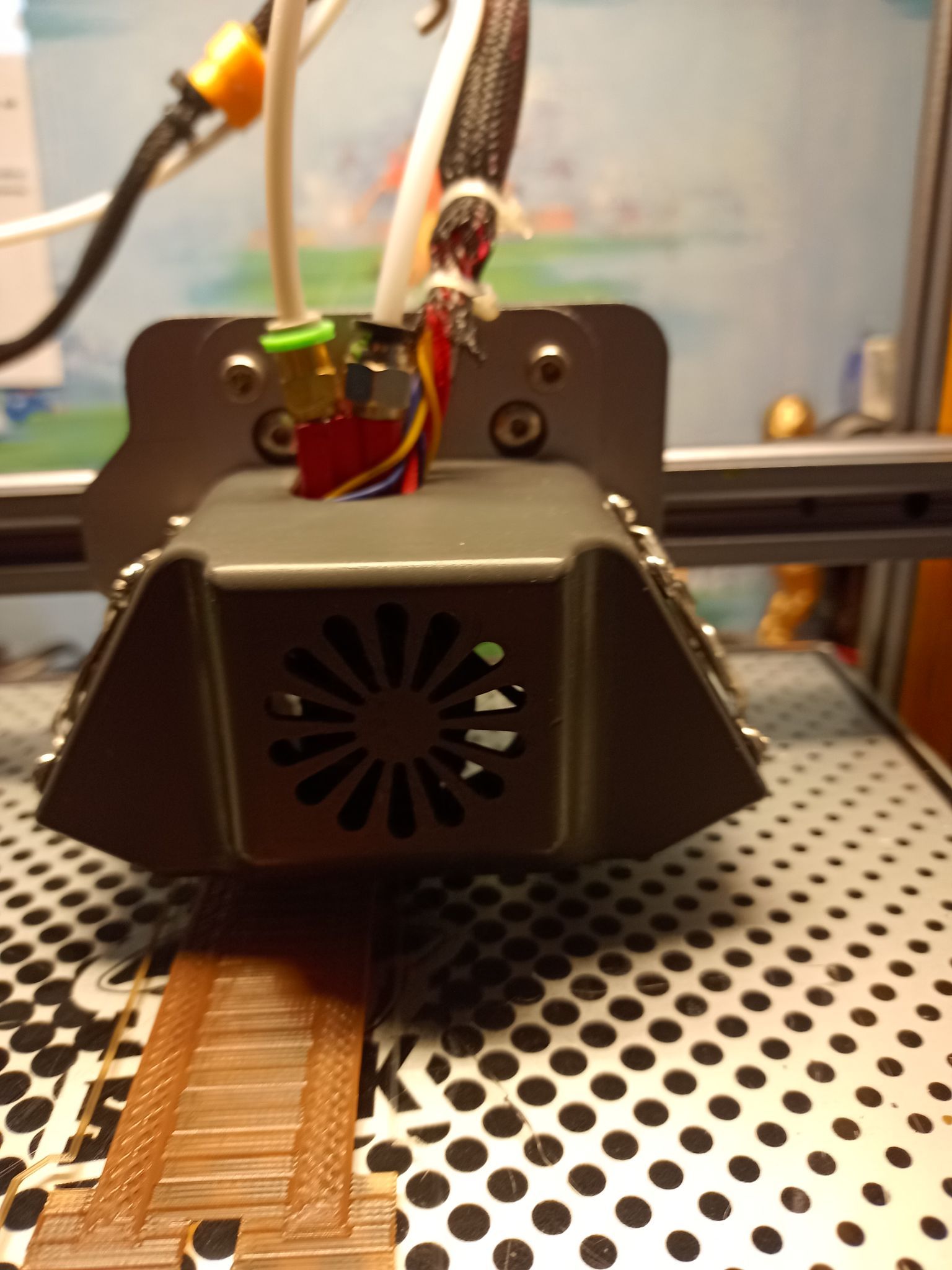
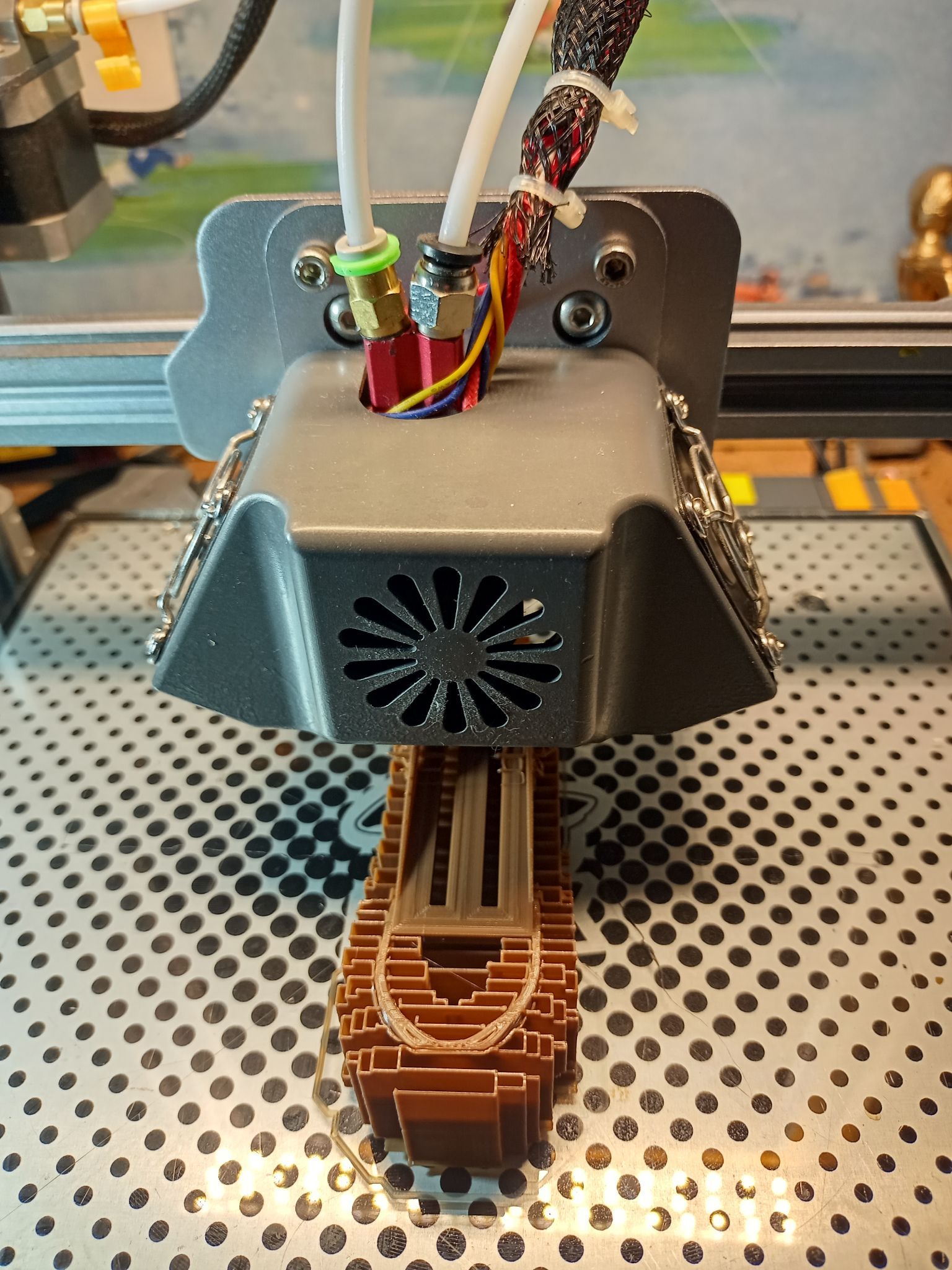
J'ai fait le test avec les paramètres indiqués plus haut. Voila les résultats que j'ai obtenu en photos Le resultat en photos
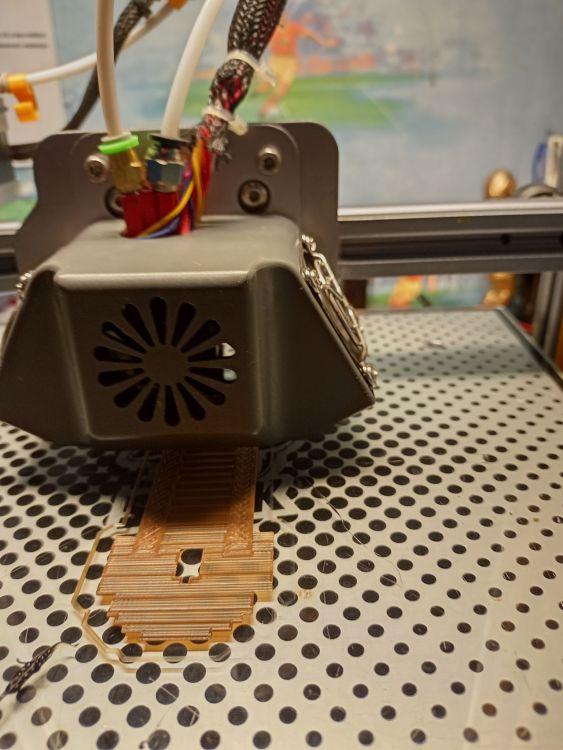
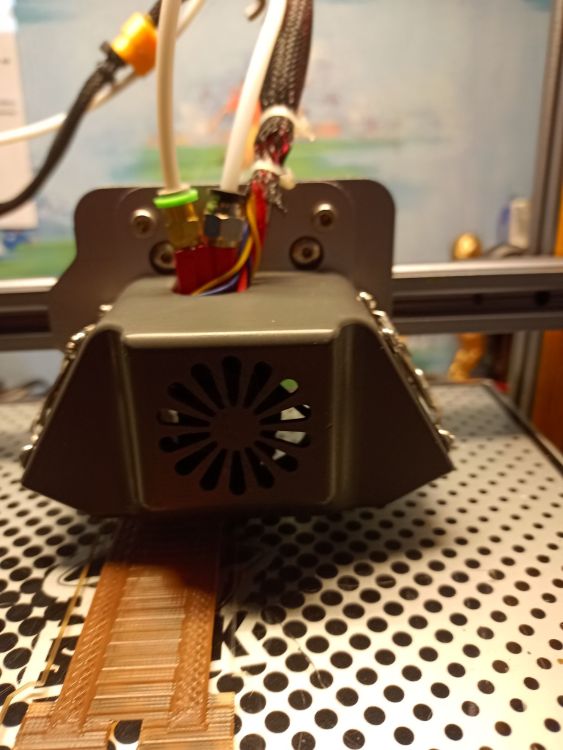
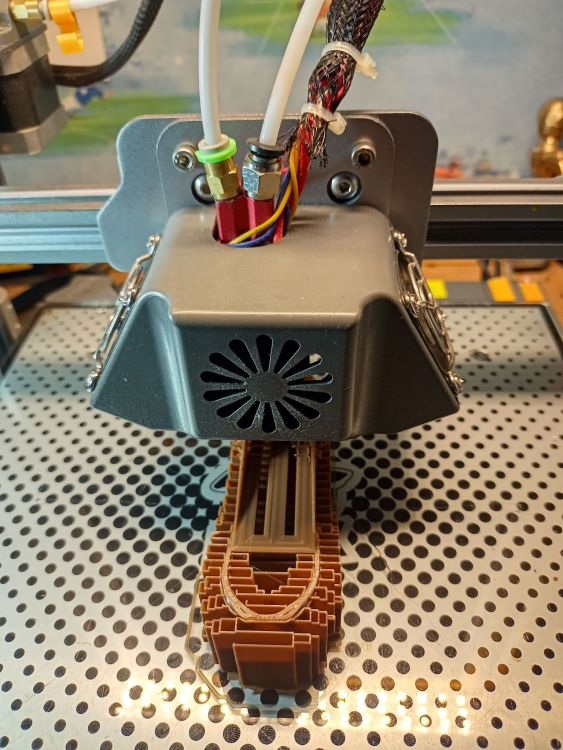





 1 point
1 point -
Salutation ! Oui je suis moi aussi très intrigué par cette machine. Voici la vidéo du live de présentation de le "Kobra 2" et de la "Photon Mono M5s" et M5 Je suis donc moi aussi plein interrogations ... de ce que j'ai compris l"Auto leveling" ce serai mais ce sont des hypothèses / suppositions donc a vérifier le fait d'avoir une jauge de contrainte sur le bras du plateau et d'avoir un écran qui s'ajuste / se déplace ( je suppose qu"il doit donc être placé sur un système a ressorts/déformable (au quatre coins ) avec un "vérouillage" du/des système déformable quand l'on se trouve hors de la phase de "leveling" "surveillance intelligent" ce serait un cumul de capteurs et de logique de contrôle par comparaison un truc qui estime le niveau de résine dans le VAT mais là je n'ai pas d'idée sur le système qui permet cela ... et donc avant de lancer l'impression il doit y avoir un message si le volume mesuré se trouve en dessous du volume estimé prévue par le trancheur embarqué dans le fichier d'impression. si il y a bien une sorte de jauge de contrainte dans le bras du plateau elle pourrait permettre d'identifier quand il n'y a plus ou trop de contraintes/résistance lors des déplacements et donc permettre de déduire que plus rien n’adhère ou que l'on force sur l’écran ... ... mais donc je suis encore dans le flou pour le exactement comment et la fiabilité de tous cela. "vitesse d'impression qui pourrait atteindre du 105mm/h" il faut utiliser une résine rapide comme de la "Anycubic High Speed RESIN" ( qui doit permettre d'exposer rapidement des couche de 0.1 mm ( comme la "Speed" de chez Phrozen https://phrozen3d.com/products/speed-resin ) et qui doit aussi avoir une faible viscosité et donc permet des déplacements plus rapides) Ajout > Pour le FEP il me semble qu'il parle d'une "3eme génération". Donc je supposent, qu'ils sont passé a du "ACF composite film" ( https://www.youtube.com/watch?v=mD390dlz7Y4 ) , mais c'est encore une hypothèse a vérifier, et je n'ai pas testé ce genre de film ( car plutôt coûteux donc je ne sais pas si c'est vraiment cela et si utiliser du "ACF" a la place d'un "FEP" ou "nFEP/PFA" est vraiment mieux ) Re ajout > Il y a donc bien un capteur de "Force Detection" reste a savoir quoi exactement
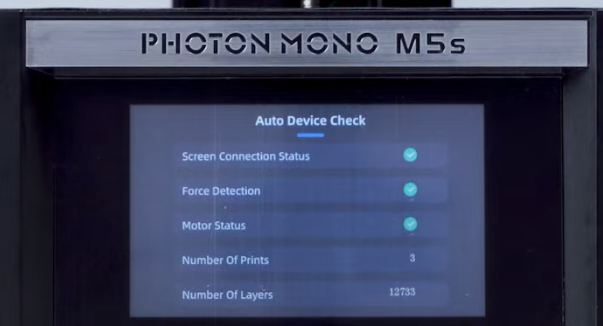 1 point
1 point -
Tout juste fran6p j'ai zappé la carte en 4.2.2...ça lui épargne le bidouillage avec le loader. mazinger3, perso j'avais essayé pour voir différents firmware et je suis finalement repassé a celui d'origine qui fait bien le travail. A force de vouloir des options de réglages pas forcement utile au quotidien on multiplie les risque de problèmes ou d'erreurs de manip. Tant mieux si ton problème est réglé c'est le principal, enjoy !1 point
-
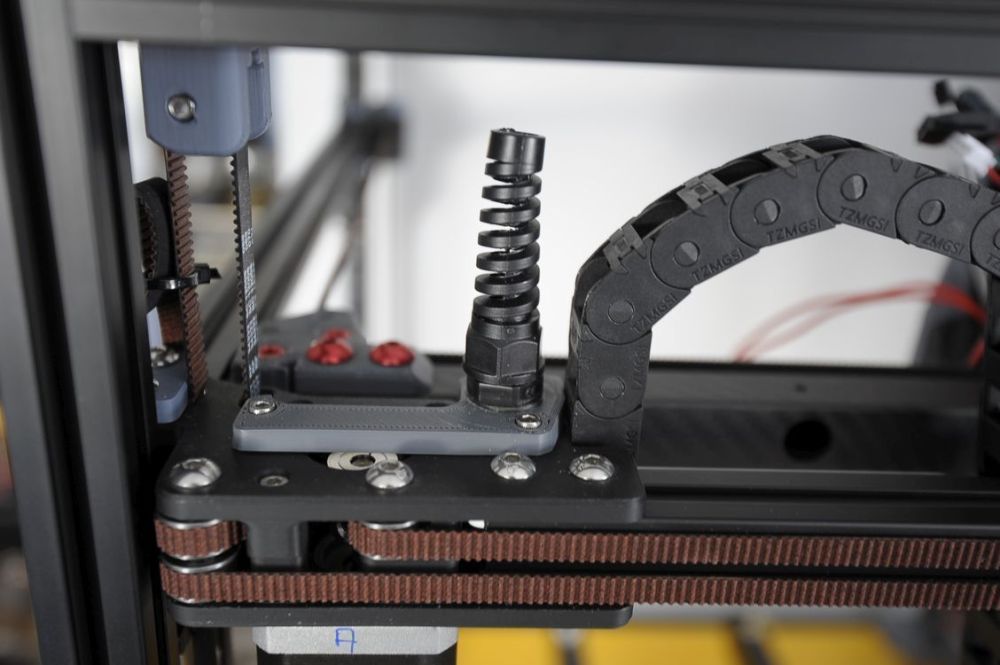
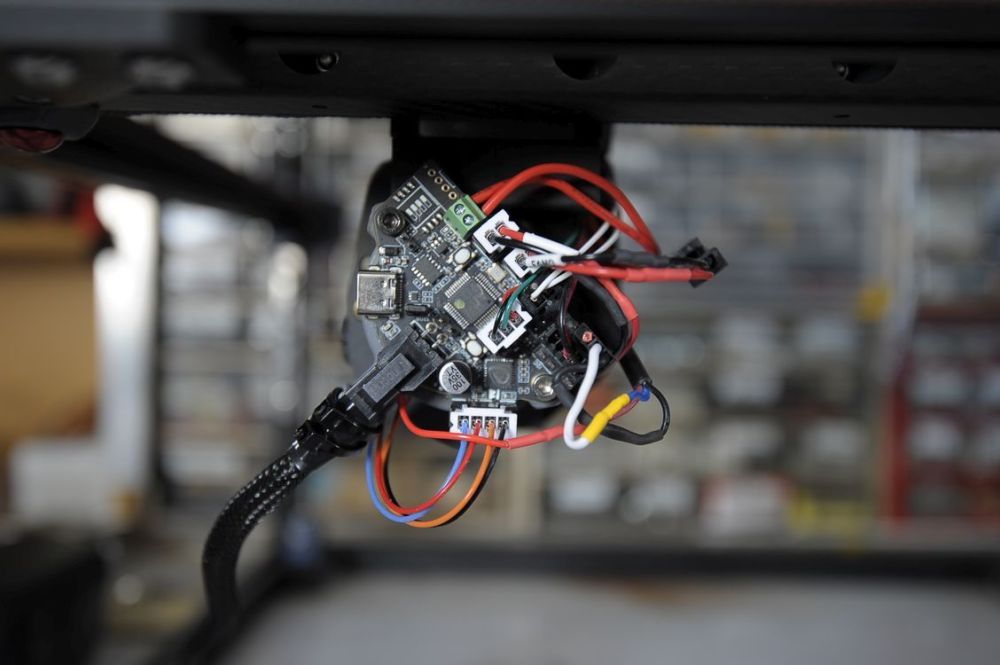
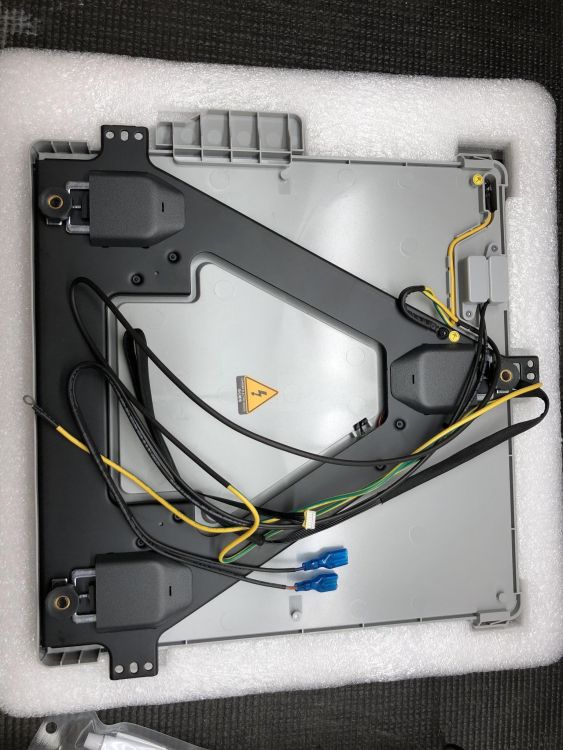
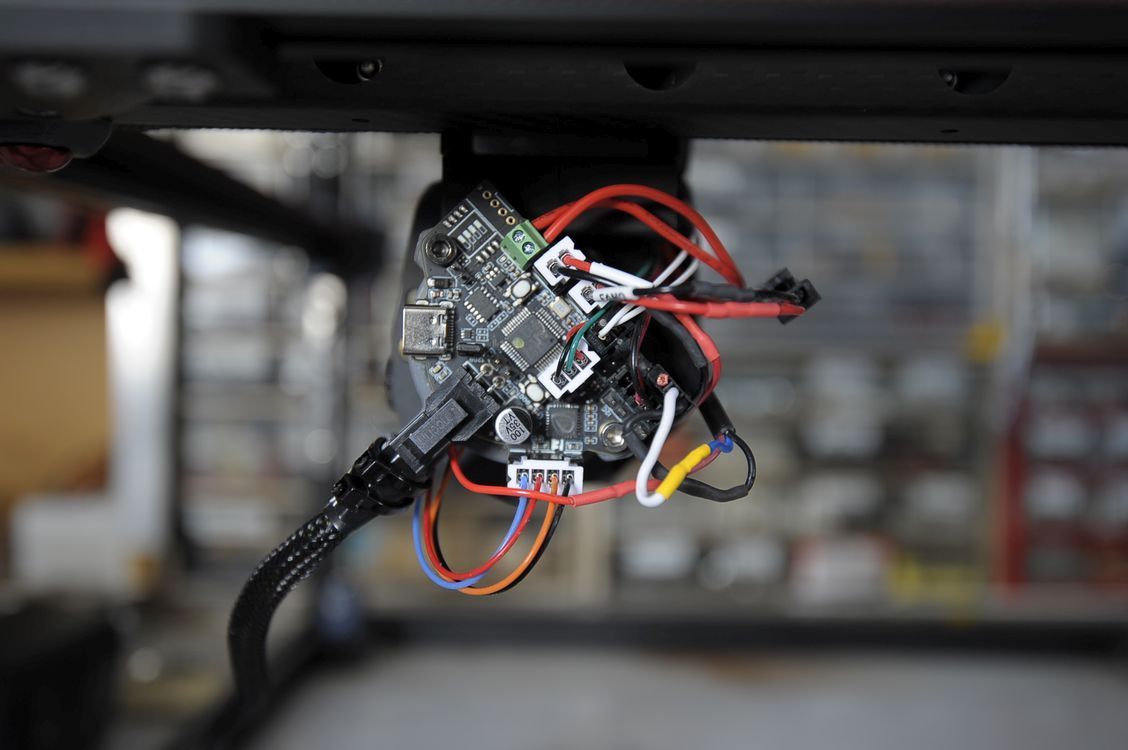
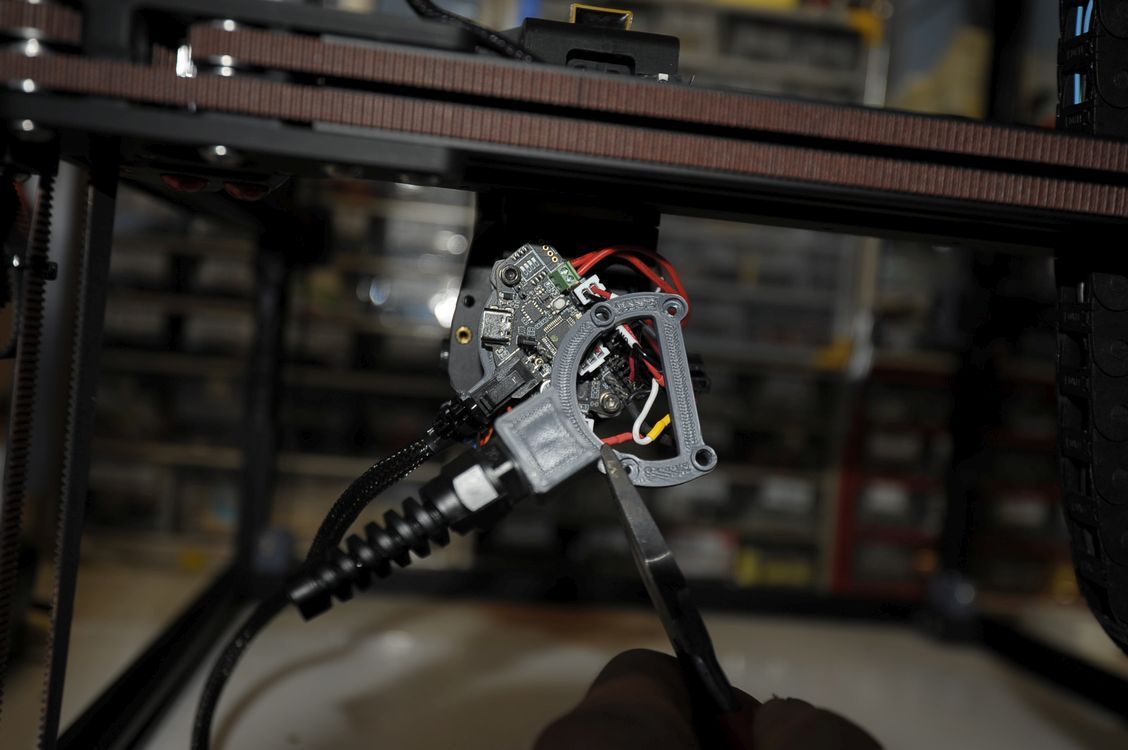
C'est toi qui a raison, c'est la solution la plus logique et la plus discrète. J'ai essayé avec le stopend à coté du récepteur du câble Can mais il arrêtait un peu trop tôt l'ensemble, il dépassait un peu. C'était à gauche du RG7. J'ai terminé de câbler l'EBB 36, c'est pas facile, il faut vraiment bien maîtriser le sertissage des prises. J'ai panaché les solutions pour la sécurité. Lorsque je ne pouvais pas faire autrement j'ai serti et soudé, certaines prises sont très très petites. Pour les autres j'ai soit pu utiliser les prises d'origine des périphériques, Led, Thermistance. Pour les ventilos j'ai soudés les prises des rallonges du kit. Le gros dossier c'est le probe Omron, il ne faut pas se louper. J'ai beaucoup lu sur le sujet et comme d'habitude il y a de tout, même des solutions baroques, comme repiquer le 24 volts sur le chauffage du hotend. D'autres bricolent des Y sur les ventilos, pas beaucoup mieux, avec klipper on peut arrêter tous les ventilos. J'ai préféré aller chercher le 24 volts à l'entrée, sous la prise du Canbus. C'est soudé et le probe sera alimenté en permanence. L'autre point important est l'insertion d'une diode Schottky entre la sortie de l'Omron et l'EBB. Certains pensent pouvoir s'en affranchir. En observant le schéma de l'EBB on voit bien la similitude avec l'Octopus, logique c'est le même concepteur. Donc diode, elle est dans une gaine thermo noir en bas à droite. Pour l'occasion j'ai utilisé une prise pour servo de modélisme, c'est le même pas et les contacts sont d'un autre niveau que les prises à sertir. J'ai presque fini, j'ai foiré un fin de course et l'insérant dans le logement Y que j'ai imprimé, je suis moins doué que Stephen du PID. J'ai essayé une autre sortie pour le câble Can avec un PG7, c'est un peut trop grand A part le fin de course que je recevrais demain le câblage est terminé. Voici ce qu'on ne monte pas grâce au CanBus. Je n'utilise pas la grosse chaine mais une des petite rallongée avec l'autre.
 1 point
1 point -
Certes avec une carte 8 bits mais @mazinger3 possède une 4.2.2 (32 bits) donc flashage via dépôt du firmware (.bin) sur une carte SD. Le nivelage peut se faire sans ABL mais dans ce cas il faut que le firmware ait été compilé avec les options idoines ( voir le point 7 «Mesh bed leveling» aka ABL du pauvre» dans ce sujet ). Pour le reste, désolé mais je n'ai pas tout compris des problèmes. Compilation du firmware via VSC ou récupération du fichier .bin ?1 point
-
1 point
-
1 point
-
1 point
-
Salut, Ton sujet serait plus lisible si tu écrivais normalement. Pour info, la dernière version de ce générateur de miniatures de fichiers STL est la version 0.50 et date d'octobre 2022.1 point
-
J'ai eu le même problème en chinois J'ai utilisé un autre téléphone pour filmer l'écran avec la traduction automatique Google1 point
-
L'impression 3D simple, rapide et efficace avec la Bambu Lab 3D X1 Carbon https://www.lesimprimantes3d.fr/test-bambu-lab-x1-carbon-20230516/1 point
-
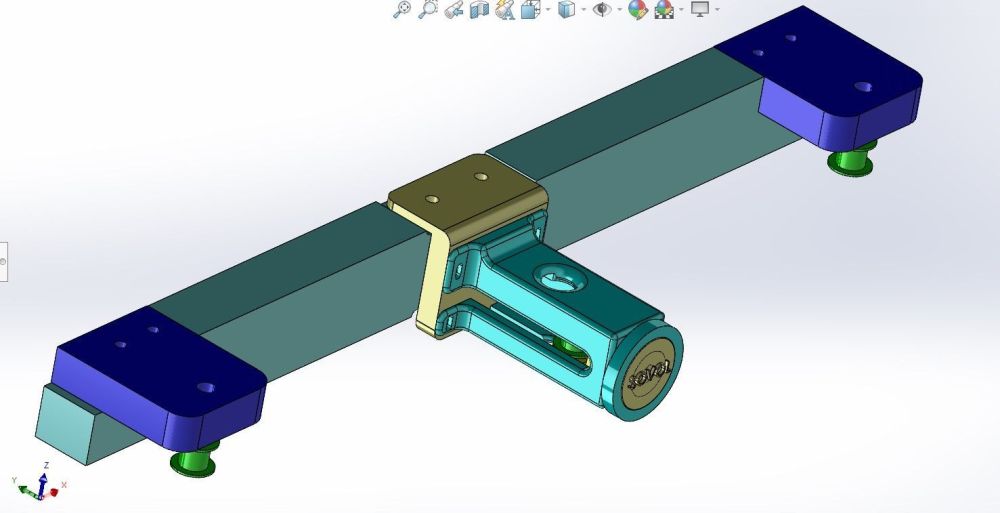
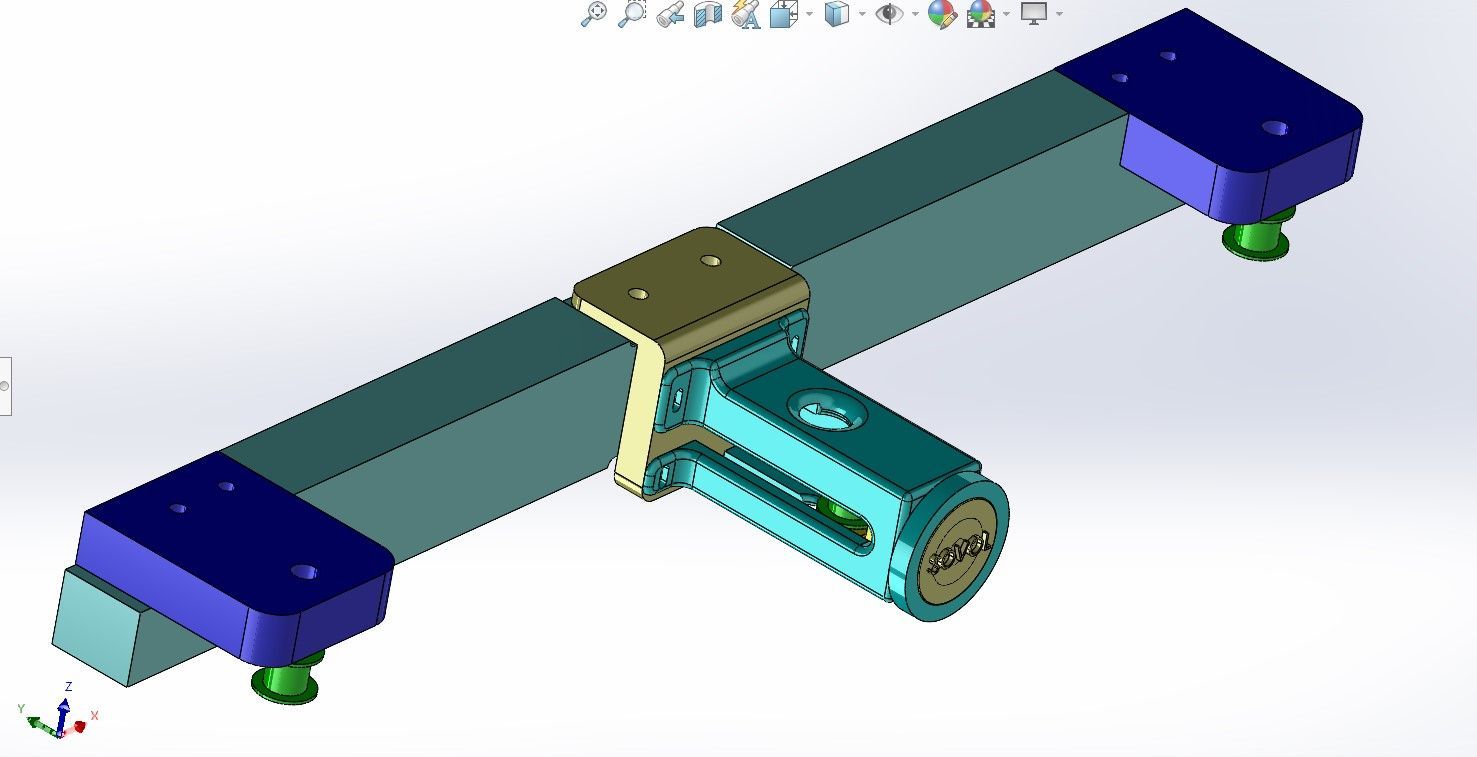
Bonjour, @Jeff78s @mich0111 Voici le support de la caméra gauche ou droite selon le besoin le pied de la caméra doit être aménagé avec un perçage et une vis M3 j'ai utilisé une caméra TRUST à 5€ qui fonctionne très bien! support_cam_L.STLsupport_cam-R.STL Salut à tous @Jeff78s @mich0111 le tendeur de courroie pour synchroniser les axes Z je suis en cours dans la conception mécanique - le tendeur permet de faire passer le filament - le bouton de manœuvre pour le tendeur - montage ajustable en hauteur - la courroie n'est pas représentée (mais je vais le faire) - l'ensemble est maintenue par deux vis du support de la bobine (non représentée) a+
 1 point
1 point -
Dis lui de s'inscrire sur le forum !1 point
-
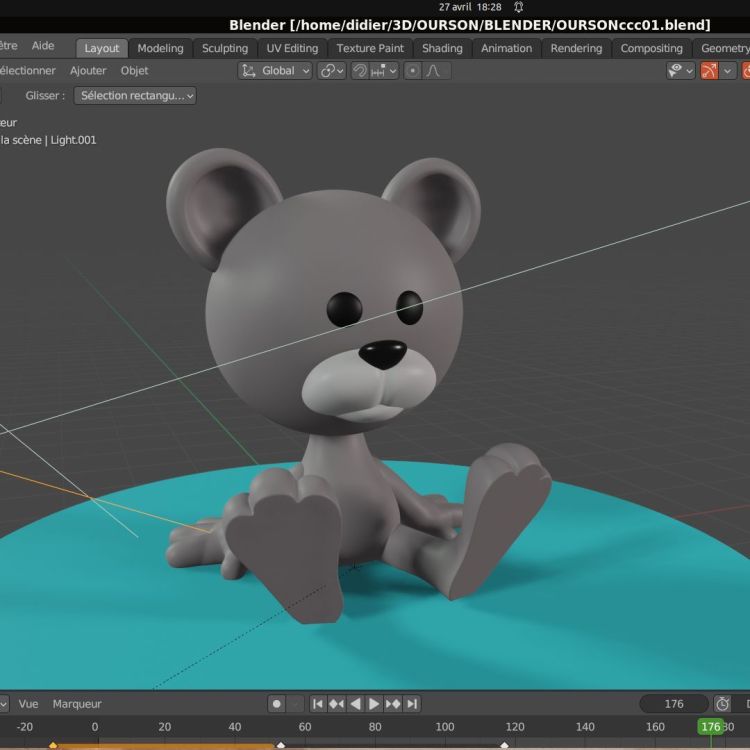
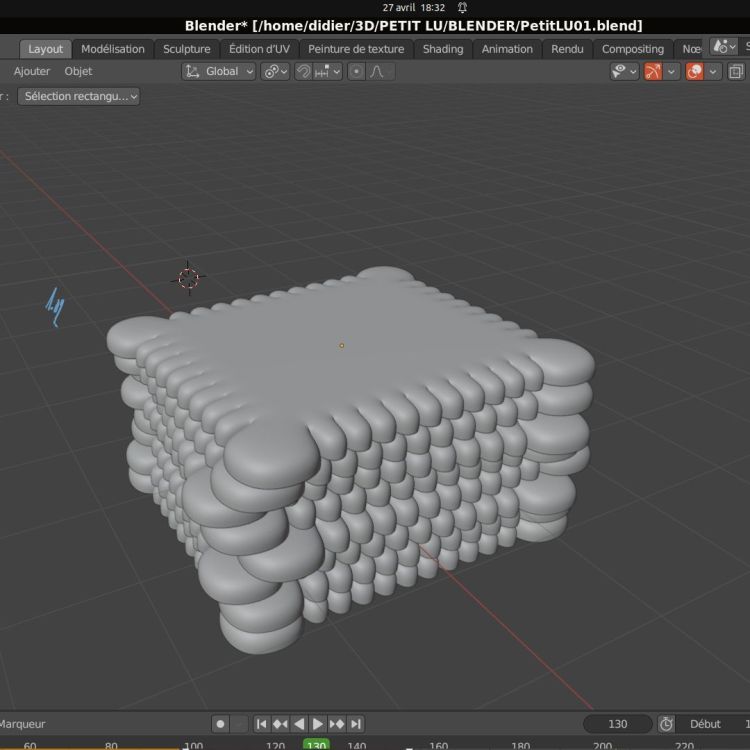
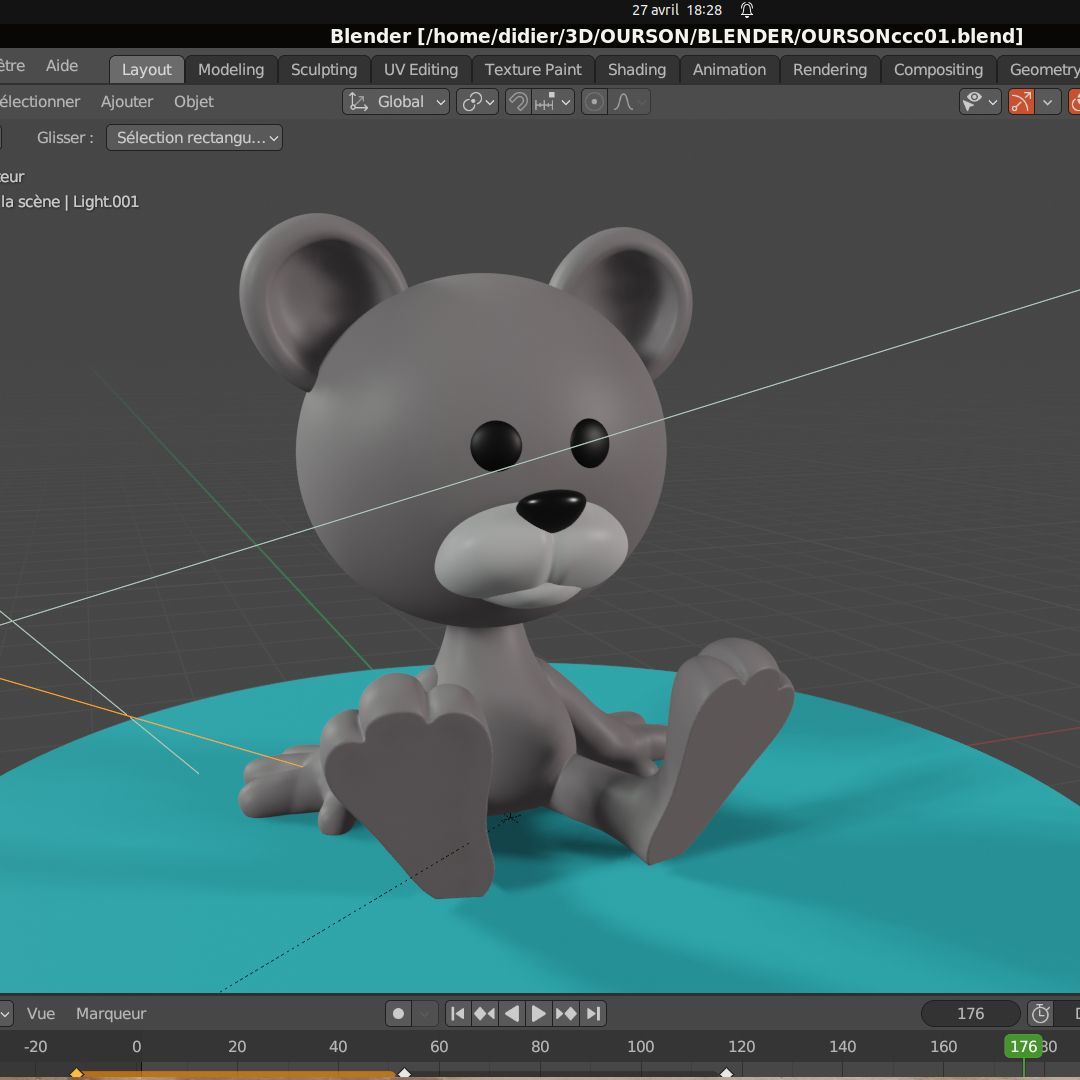
Bonjour, Mes dernières créations avec Blender... Le chat démoniaque, hauteur 12 cm. L'ourson et la boîte en gateaux...Hauteur 16 cm... Super héros et mobilité douce, BatBat et sa Bat Trottinette...Hauteur 16 cm...













 1 point
1 point -
Salutation ! Pourquoi pas ... personnellement sur une machine sans "Truc"Touch, je reste avec la méthode qui utilise une feuille de papier. Une fois que l'on a pris le coup de main c'est vite fait. Quand il y en a un par défaut je pense qu'il ne faut pas s'en priver. Et merci de nuancer. Personnellement je trouve le mot "pourri" mal choisie. j'aurais plutôt dit "pas forcement simple a bien installer et a utiliser et dont certain sont de qualités discutable"1 point
-
Je confirme c'était bien l'écran lcd qui était mort. Je l'ai remplacé et ca marche nickel merci à tous!!1 point
-
1 point
-
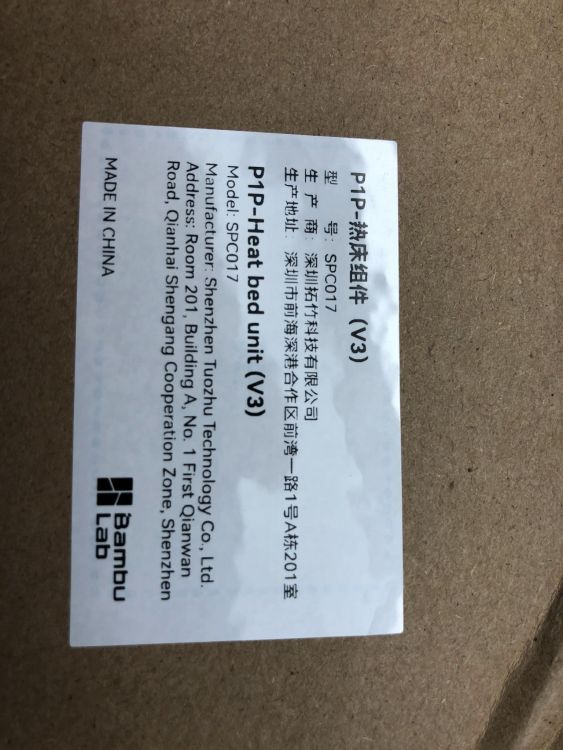
Bonjour Suite du feuilleton. Je viens de recevoir un nouveau bed, je vérifie la planéité en sortie de boite et là il est nickel. En regardant bien, je me rend compte que sur la boite c'est marqué: P1P V3. Pour monter un BED V3 sur une XC1 avec un V2, il est noté sur le WIKI qu'il faut changer la carte AC. Je leurs notifies sur mon ticket que je n'ai pas reçu la carte AC correspondante et qu'il faudrait qu'ils me l'envois. En réponse, ils me disent qu'il vont me renvoyer un bed X1C V3 avec une carte AC V3. J'espère qu'il sera bien droit comme le précèdent. Je pensais que les bed X1C et P1P étaient semblables., je commence a en avoir une collection., c'est le quatrième qu'ils m'envoient.
 1 point
1 point -
C'est pas que c'est pas ça, quand tu sais la maitriser une imprimante 3d fonctionne très bien, mais: -1 an de galère. -1 an d'apprentissage. -la troisième année t'en fais ce que tu veux (ou presque). Et c'est justement là que le bas blaisse, les vendeurs disent que n'importe qui peut s'en servir, mais, même si dans l'absolu ils n'ont pas tord, ils oublient de dire que c'est long à apprendre, et si il y a autant de machines à la revente, c'est pas parce que ça marche pas, mais soit que le proprio a acheté une machine plus récente, soit tout simplement que le proprio n'a aucune patience. Et pour être franc, les anet sont plutôt du côté bas de gamme.1 point
-
pas forcément, il y a des mises à jour de klipper qui nécessitent une mise à jour du firmware sans que ce soit une mersion 'majeur' (il me semble qu'entre la 0.10.6xx et la 0.10.8xx il fallait une maj du firmware. Après, je suis partisan (pour les imprimantes) du si ça marche et que je n'ai pas besoin des nouvelles fonctionnalité, je ne mets pas à jour ... et quand je mets à jour, je fais une image de la SD juste avant, pour ne pas me prendre la tête en cas de pb.1 point
-
De l'arthrose peut être... Bon je sors....1 point












































.thumb.jpeg.9a4019c4378b9b868774b9f3b684a811.jpeg)

