Classement




Contenu populaire
Contenu avec la plus haute réputation dans 26/04/2019 Dans tous les contenus
-
Au fait, je suis un peu arrivé en douce sur le sujet sans claquer la bise. Je tenais à remercier tous les très gros bosseurs qui ont pu permettre ce portage sur nos petites Alfawise. Vraiment très bon boulot les gars ! De plus, on pourrait croire que vous n'avez que ça à faire, mais certains d'entre-vous on quand même un travail et des occupations prioritaires à côté, donc ça vaut vraiment un très gros MERCI !!!2 points
-
Vous voyez venir l'atelier bricolage sur la table du salon ?!! Moi c'est au programme du WE2 points
-
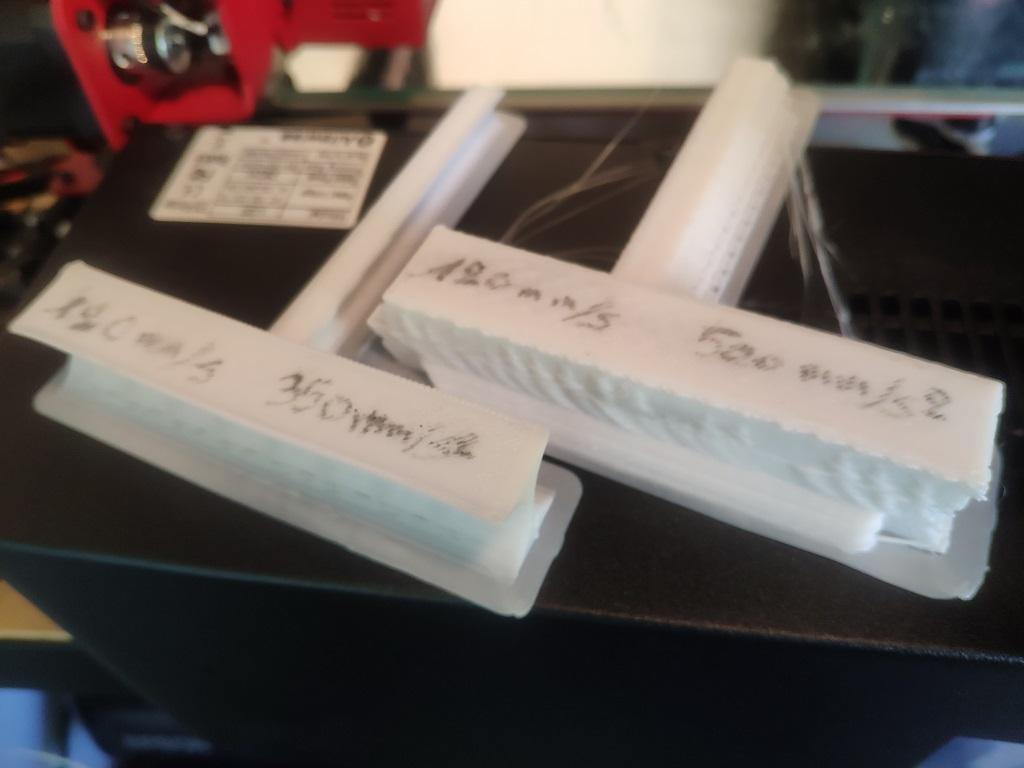
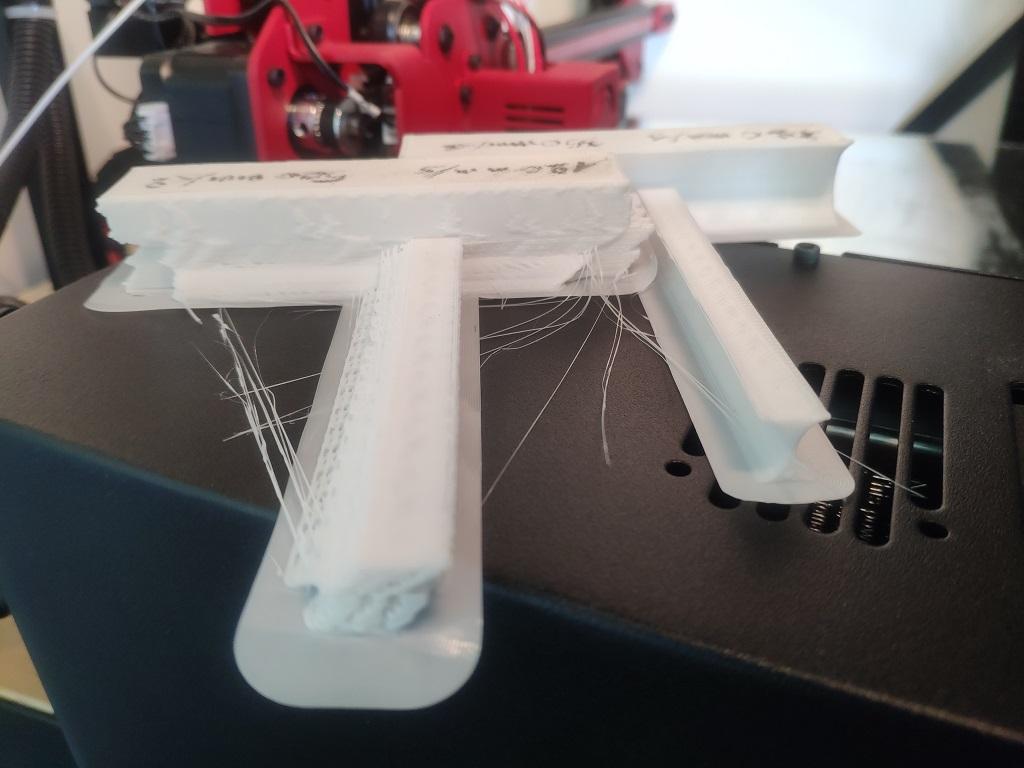
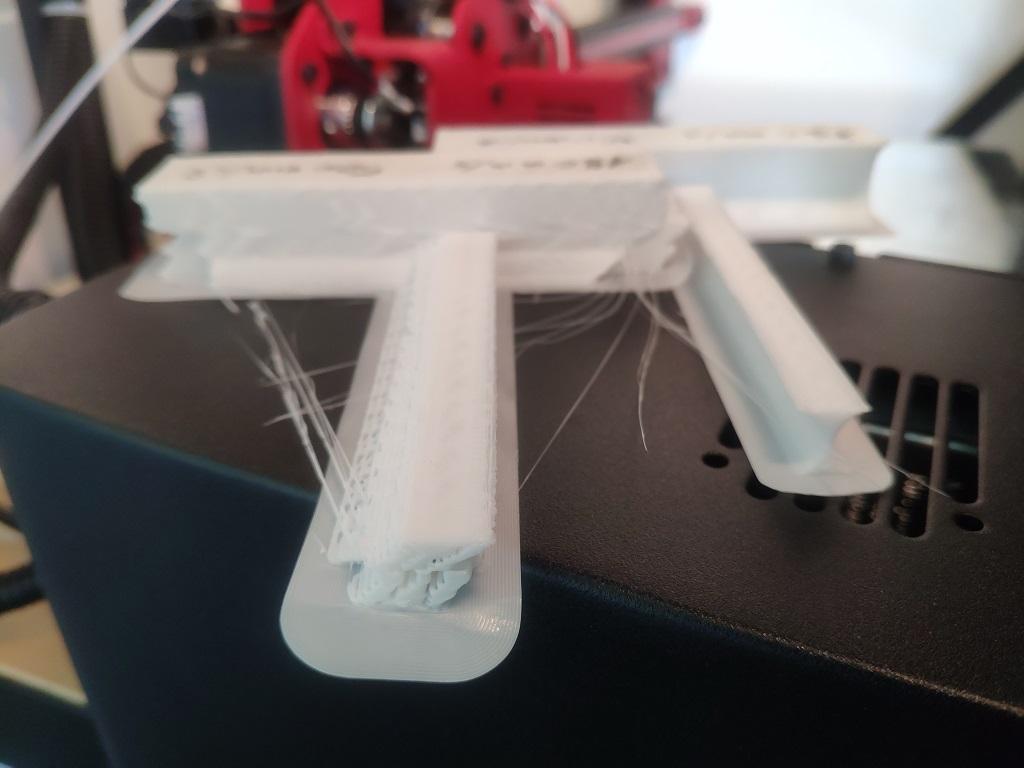
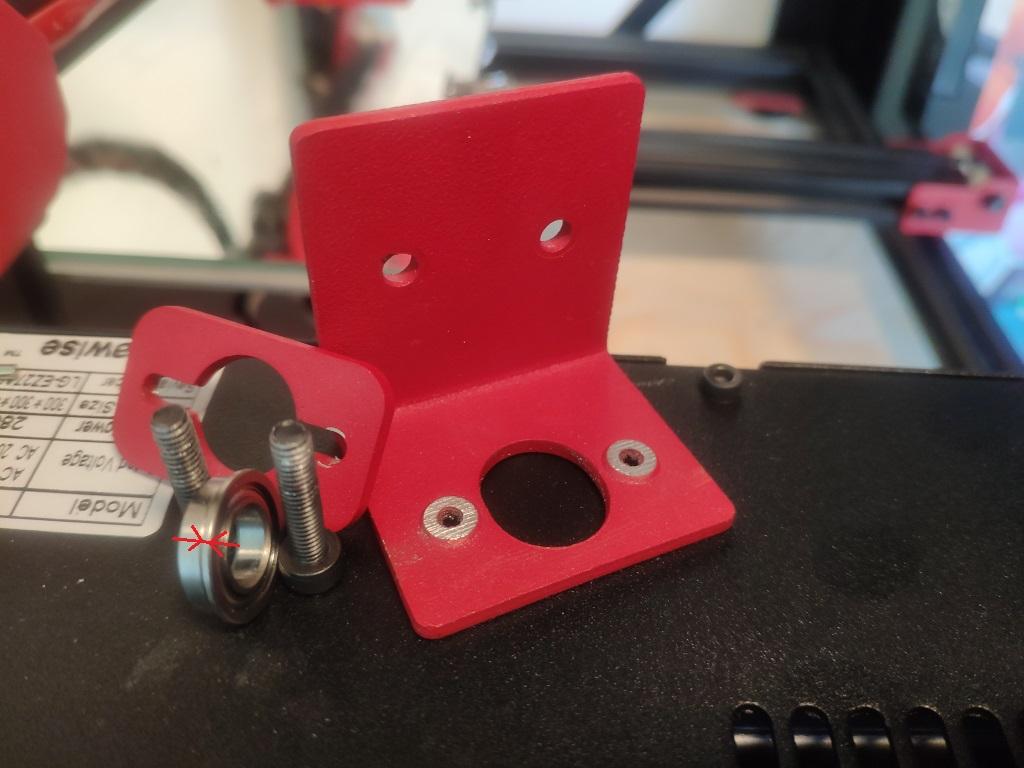
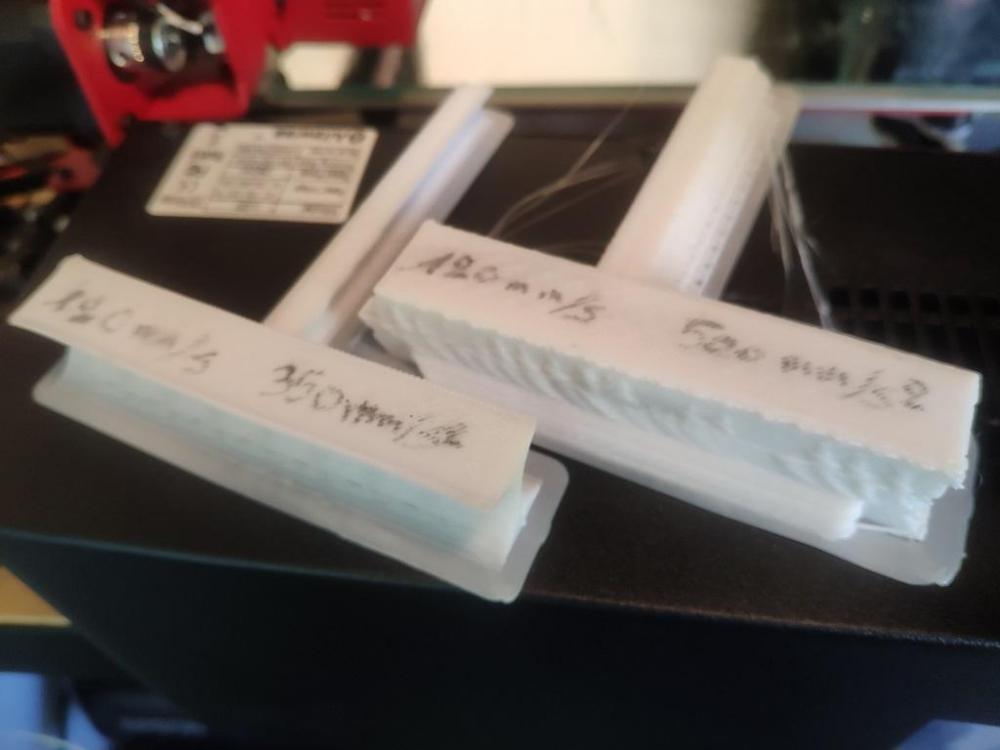
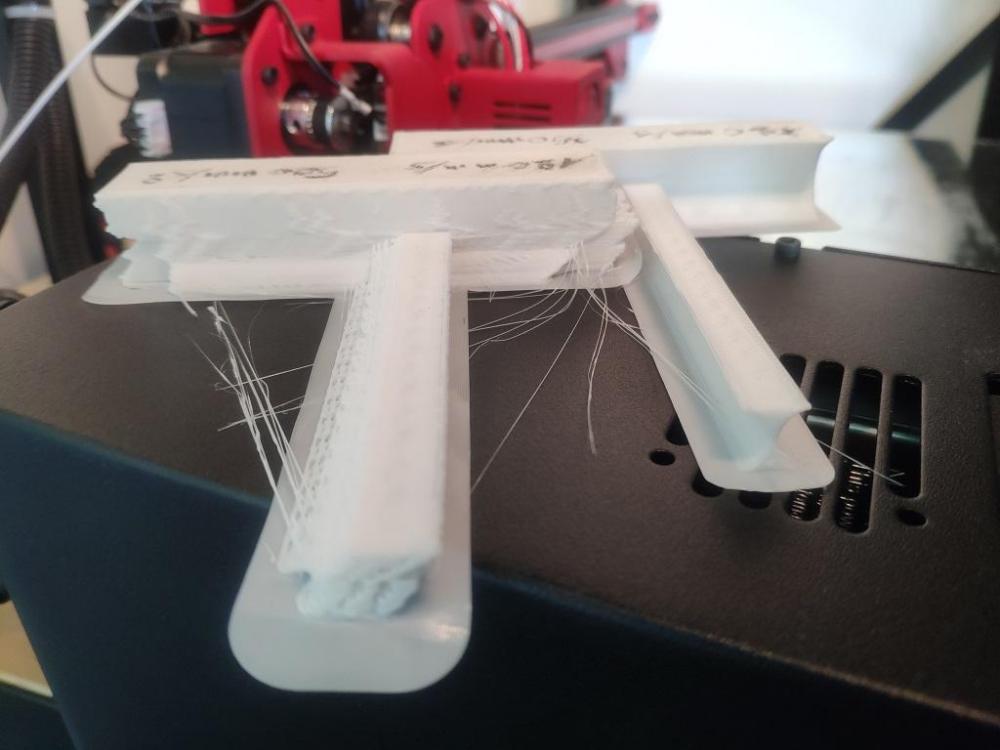
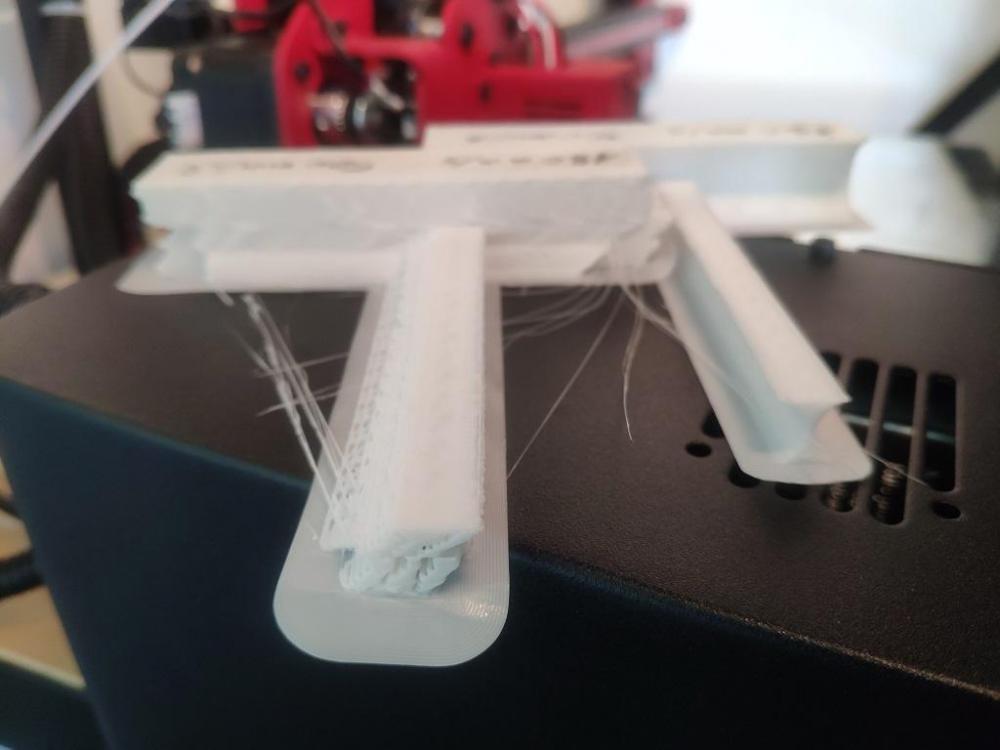
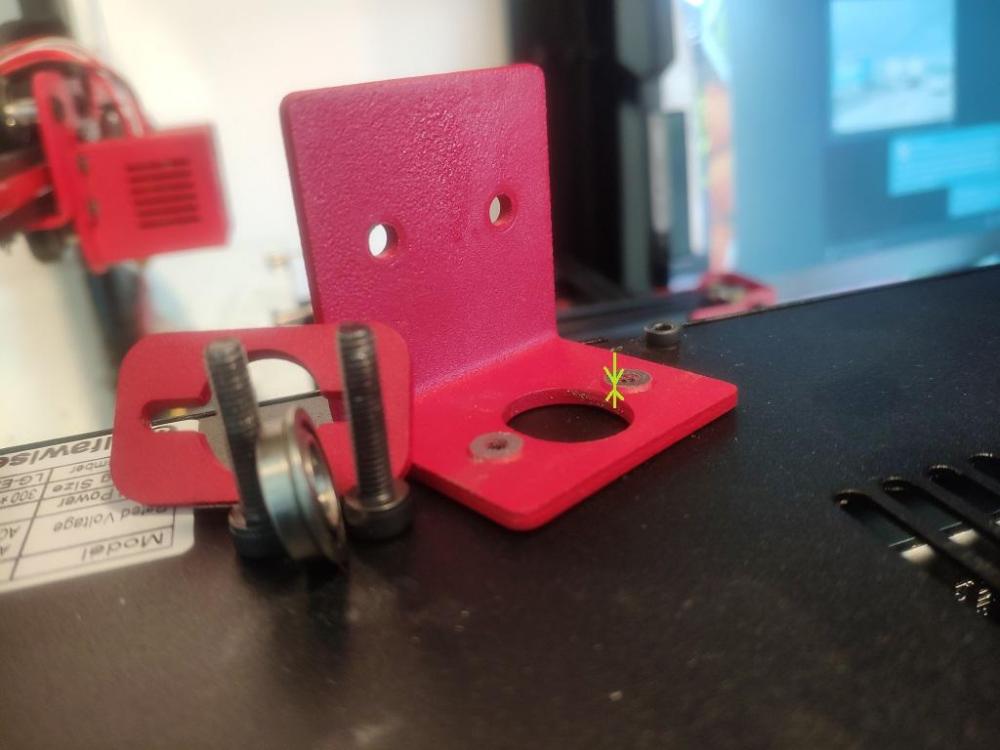
Bonjour, Voilà après quelques déboires sur les ratés de Y après un passage à Marlin v2.0 sur mon U20 j'ai pris parti de "stabiliser" au mieux mes axes et faire des tests en imprimant ce qui ressemblerait à des poutrelles pour vérifier les axes X et Y (même si la plupart des problèmes sont localisés que le Y). Disclaimer : Ces modifications sont effectuées seulement pour le besoin des tests. Je ne suis pas certain que vos courroies et les axes de vos poulies et moteurs apprécient dans le temps... J'ai donc d'abord tendu mes courroies Y et X comme la ficèle d'un string (je vous rassure pas trop fort non plus et c'est temporaire pour ces tests) J'ai également bloqué la bague d'extrémité de la vis trapézoïdale du Z car elle générait un effet de balancier lorsque le X ou le Y faisait trop vibrer la potence, exagérant donc ces vibrations. J'ai donc limé les cônes des supports de vis : Voilà, une fois le tout prêt à démarré j'ai fait 2 tests (tranché avec Cura, en print et en déplacement à 120mm/s, jerk en print à 20 et jerk en déplacement à 30) ; l'un avec les paramètres par défaut de Marlin (sur une build qui date du début de la semaine - j'ai cru voir une valeur à 500mm/s² mais je me demande si ça n'était pas plus alors je corrigerais), et l'autre avec une accélération à 350 mm/s². Je vous laisse juger : EDIT : J'ai refait un test avec des vitesses de print/déplacement à 120mm/s, accélération à 450mm/s² et jerk print/déplacement à 20 et c'est nickel. A mon avis je peux passer à 500mm/s² sur l'accélération et baisser la vitesse en print aux alentours de 80 mm/s et ça devrait coller pour un rapport performances/qualité acceptable sans défaut. Dès que j'ai le temps je me charge de rebuilder Marlin avec ces paramètres, puis le retester et le pousser sur le git. J'ai pris le parti de modifier les valeurs dans Cura plutôt que dans le firmware Marlin pour me "simplifier" la tâche. Idéalement, quand les valeurs « tolérables » seront atteintes il faudrait les partager sur le forum, les mettre dans le Configuration.h et builder Marlin pour nos U20/20+/30 avec ces valeurs. Puis, libre à chacun de les baisser ou monter, mais au moins les paramètres par défaut seront déjà acceptables pour imprimer sans déception systématique.

 2 points
2 points -
merci CacaoTor Crzay pour le 5V en D7, je vais tester le touchmi ce week-end en mode je le colle au double face (extrudeur d'origine). J'imprimerai un fang et support quand deamoncrack aura fait un fang pour l'extrudeur d'origine avec support touchmi. En tout cas, vous êtes plus qu'actif!!!! Je viens de voir une section dans Configuration_adv.conf qui est intéressante, ESP32 WIFI, et comme j'ai un nodemcu, je vais fouiller un peu ce week-end!2 points
-
Salut ! La réponse est également en première page, tout est illustré...! Pour ceux que cette fonctionnalité intéresse, j'ai bossé sur une première version pour l'E3D, @CacaoTor va jouer les bêta testeurs, si ses essais sont concluants, je verrais à adapter le support aux autres modèles comme ça tout le monde pourra en profiter...2 points
-
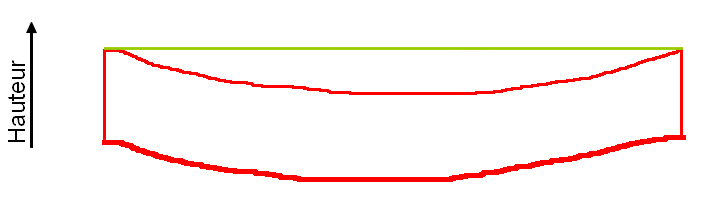
Petit tuto sans prétention pour qui veut comprendre quelques aspects de Marlin, et surtout comment trouver de la place pour ceux qui, comme moi, ont une carte mère limitée. Les plus assidus du forum n'y apprendront rien ou presque, pour le reste, j'espère que ce post pourra être utile. Je suppose dans ces lignes que le lecteur sait déjà comment flasher sa machine avec le logiciel Arduino, et modifier les fichiers configuration.h et configuration_adv.h Je vais essayer de suivre l'ordre des fichiers de configuration, pour ne pas avoir à chercher trop longtemps les lignes correspondantes, mais il faut savoir que je ne détaillerai pas tout : Bien des lignes doivent rester telles quelles si l'on veut garder une imprimante fonctionnelle. Pour info, je me base sur une version de Marlin 1.1.9. Fausses idées toutes faites Tout d'abord, je souhaitais tuer dans l’œuf les fausses croyances que j'ai déjà pu lire ici et ailleurs : Il est inutile de supprimer les commentaires, cela ne vous fera que perdre votre temps Les fonctions commentées (celles commençant par '//'), ne sont pas incluses à la compilation, il est tout aussi inutile des les supprimer Fichiers de langues inutilisées : Dans language_fr.h par exemple, on voit que des tas de lignes concernant le détecteur de fin de filament, l'utilisation de l'UBL (Unified Bed Leveling), etc qui ne sont pas commentées. Même si vous n'utilisez pas ces fonctions, il est inutile de supprimer ou commenter ces variables de langue, elles ne seront pas incluses dans la compilation de Marlin. Lors de la compilation, Arduino va aller chercher et compiler uniquement les informations qui sont nécessaires, aucun superflu ne sera mis en mémoire. Dans la même lignée, rien ne sert de supprimer les lignes vides. Pour la bonne compréhension : - Chaque ligne qui commence par '//' est un commentaire ou une fonction commentée. Cela veut dire qu'Arduino ne lira pas cette ligne, et passera à la suite. - Chaque ligne qui commence par '#' est une instruction. Seules ces lignes seront lues, interprétées et compilées pour votre imprimante. Configuration.h Je ne détaillerai ici que le fichier configuration.h. J'espère avoir le temps dans les jours à venir de faire la même chose pour le fichier configuration_adv.h. Jacky Tuning On commence avec du superflu, l'écran de démarrage : Ligne 80 du fichier : #define STRING_CONFIG_H_AUTHOR "Schyzo, Anet E12 BLTouch" // Who made the changes. #define SHOW_BOOTSCREEN #define STRING_SPLASH_LINE1 "V1.1.9 for Anet E12" // will be shown during bootup in line 1 #define STRING_SPLASH_LINE2 "Adapted For Schyzo" // will be shown during bootup in line 2 Ces 4 lignes ne font qu'afficher l'écran de démarrage ( Boot Screen). L'imprimante n'a pas besoin de ça, et moi non plus. Sans cet écran, l'imprimante sera lancée environ 5 secondes plus rapidement. Commentez-donc ces 4 lignes (en ajoutant '//' devant chaque ligne) si vous voulez gagner plus de 1000 octets (1282 chez moi). Toujours dans le look, ligne 97 : #define SHOW_CUSTOM_BOOTSCREEN Ceci ne sert qu'à afficher une image personnalisée définie dans le fichier Marlin/_Bootscreen.h au démarrage. Certains fournissent une image comme TH3D qui ne fait qu'alourdir le firmware. Vous pouvez commenter Puis, à la ligne 100 : #define CUSTOM_STATUS_SCREEN_IMAGE Même combat, une image personnalisée sur l'écran d'accueil, définie dans le fichier Marlin/_Statusscreen.h comme ici : Vous pouvez commenter cette ligne pour gagner de précieux octets (voir plus). PID Le PID (Proportional Integral Derivative) est un procédé de Marlin et autres firmwares qui permet une montée en température optimisée des éléments chauffants (buse et lit). Lorsque le PID de ces éléments n'est pas activé, la montée en température est définie en 'bang-bang', comprendre en gros en binaire : "Si c'est trop froid, j'envoie du courant à fond, si c'est à bonne température, je coupe". Aussi la température ne fait que monter et descendre, ce qui peut poser une dégradation de l'impression notamment avec la température de la buse. A titre d'exemple, j'ai trouvé cette image sur le forum reprap.org : Page en question : https://reprap.org/forum/read.php?262,782815 Exemple de courbe de température en bang-bang : Avec utilisation du PID : Bref, si j'en parle ici c'est que l'utilisation du PID pèse quand même quelques kilos dans la bataille du gain de mémoire. Pour ma part, j'ai activé le PID de la buse et du lit, quitte à supprimer d'autres fonctions. PID de la buse : Pour l'activer, il faut se rendre à la ligne 362 : #define PIDTEMP Puis environ 20 lignes plus bas, il faut définir les valeurs Kp, Ki et Kd : #define DEFAULT_Kp 28.94 #define DEFAULT_Ki 2.37 #define DEFAULT_Kd 88.30 Si ces lignes sont commentées, décommentez-les. Ces valeurs que je n'expliquerai pas faute de compétence (et ce n'est pas le sujet), sont MES PROPRES valeurs. C'est elles qui définiront la montée en température de votre élément chauffant. A chaque changement de buse ou matériel chauffant (cartouche chauffante par exemple), il faut redéfinir ces valeurs. Pour cela, je vous renvoie vers un tuto du forum qui explique pas à pas la marche à suivre pour récupérer ces 3 paramètres selon votre machine : A noter que l'utilisation du PID pour la hotend requiert environ 3300 octets. PID autotune : Marlin propose d'ajouter un menu dans l'imprimante afin de lancer un autotune, c'est à dire que vous pourrez lancer directement depuis l'écran de l'imprimante un autotune qui calculera et enregistera les meilleurs valeurs pour votre imprimante. Cette fonction lancera une montée en température de la buse (température que vous définirez via l'écran de l'imprimante directement), jugera et enregistrera dans l'EEPROM des meilleurs valeurs obtenues. Pour cela, décommentez la ligne 367 : #define PID_AUTOTUNE_MENU Lors de l'autotune, sélectionnez une température que vous employez le plus. Par exemple si vous n'imprimez que du PLA et PETG, prenez une moyenne haute à 230° par exemple. Le PID autotune occupera 600 octets environ de plus. PID du bed : Pour le lit, l'utilisation du PID reste identique, à savoir une température constante. En mode BED_LIMIT_SWITCHING en revanche, on retrouve la chauffe binaire : On chauffe à fond ou rien du tout. Si vous souhaitez activer l'utilisation du PID pour le lit chauffant, décommentez la ligne 407 : #define PIDTEMPBED Et n'oubliez pas de commenter la ligne 409 afin de libérer un peu de place : //#define BED_LIMIT_SWITCHING Puis comme pour la buse, définissez les valeurs de Kp, Ki et Kd ligne 424 : #define DEFAULT_bedKp 255.01 #define DEFAULT_bedKi 17.39 #define DEFAULT_bedKd 934.85 L'utilisation du PID pour le lit chauffant occupera environ 1400 octets de plus que le mode BED_LIMIT_SWITCHING. A noter qu'il ne sera pas possible, même en ayant activé l'autotune, de lancer un test autotune pour le bed depuis l'écran LCD (vous ne devrez pas avoir à le changer régulièrement, je l'espère pour vous ). Là encore, je vous renvoie vers le tuto de neoraptor pour récupérer les valeurs Kp, Ki et Kd pour votre lit : Protection contre vous-même : Si jamais vous avez confiance en vous, sachez qu'il est possible de désactiver la protection d'extrusion à froid, ligne 445 : #define PREVENT_COLD_EXTRUSION // Permet de ne pas faire tourner l'extrudeur si la température de la buse n'est pas d'au moins 170° (EXTRUDE_MINTEMP) et la protection d'une trop grande extrusion manuelle, ligne 452 : #define PREVENT_LENGTHY_EXTRUDE // Protection pour ne pas extruder plus de 200mm (EXTRUDE_MAXLENGTH) en dehors d'une impression Ces 2 fonctions commentées vous feront gagner presque 1000 octets, à vous de jauger votre confiance en vous Je ne détaillerai pas la désactivation des protections thermiques du bed et de la hotend, qui sont à mes yeux essentielles et donc non négociables. Bed leveling Si certains ont déjà du mener la bataille des octets avec Arduino, ceux-ci savent combien l'utilisation d'un palpeur est lourd. Pour avoir fait quelques tests pour ce tuto, j'estime à 18ko le poids de l'utilisation d'un BLTouch par rapport à un simple endstop. Mais saviez-vous que vous pouviez tout de même espérer libérer un peu de place ? Chaque mode de leveling pèse plus ou moins lourd, et est plus ou moins complet forcément. Bi-linéaire Ligne 982 : #define AUTO_BED_LEVELING_BILINEAR Le mode certainement le plus utilisé et adapté à la plupart des plateaux. Grâce à un palpeur/sonde (BLTouch ou autre), il fait 3 palpages (points) ou plus dans chaque axe (X Y) et en détermine grossièrement ou finement selon le nombre de points déterminés les défauts du plateau, qu'il corrigera pendant l'impression. Nécessite 11 ko sur la carte. 3 points Ligne 980 : #define AUTO_BED_LEVELING_3POINT Avec un palpeur, sonde 3 points déterminés et détermine le nivellage du plateau. Plus léger (6 ko), à n'utiliser que si vous êtes sûrs que votre plateau est bien plat. Linéaire Ligne 981 : #define AUTO_BED_LEVELING_LINEAR Semblable au mode bi-linéaire, corrige un défaut de lit qui ne serait pas correctement incliné. Ce mode ne corrige pas les défauts d'un lit déformé (creux au centre par exemple). Nécessite 11 ko sur la carte, je cherche l'intérêt de ce mode. Unified Bed Leveling (UBL) Ligne 983 : #define AUTO_BED_LEVELING_UBL Ce mode est trop gros pour ma carte, aussi je n'ai pas pu le tester. Quoi qu'il en soit, celui-ci permet de créer une matrice très précise de votre lit et d'en enregistrer les relevés dans l'EEPROM. Puis à chaque impression, palpe 3 points pour déterminer l'inclinaison et les défauts du lit puis s'appuie sur les valeurs précédemment enregistrées pour corriger très précisément l'impression en fonction des défauts de votre lit. Pèse approximativement 48 ko. Mesh Leveling Ligne 984 : #define MESH_BED_LEVELING Un mode que j'ai découvert il n'y a pas longtemps. Celui-ci permet de corriger une déformation du lit, sans nécessiter de palpeur. Vous faites le sondage à la main (aidé par Marlin bien sûr) avec votre feuille de papier, vous jouez avec le Z depuis l'écran LCD et celui-ci corrige les défauts du lit pendant l'impression, comme si vous aviez un BLTouch. 9.7 ko nécessaires pour ce mode. Hauteur lissée (fade height) Avec certains bed leveling activés (Bi-linéaire, Mesh leveling ou UBL), vous avez la possibilité de définir une hauteur lissée, c'est à dire que pendant l'impression, Marlin va au fur et à mesure corriger la pièce pour que le défaut du lit ne soit plus visible à partir de X mm (définie via l'écran LCD ou par la commande M420 Z(hauteur). En exagérant, si votre lit est creux au centre, on peut imaginer imprimer une boite ainsi : En rouge en haut le résultat sans la hauteur lissée, en vert ce que donnera l'impression avec la hauteur lissée. Nécessite 1600 octets. Bed leveling via le LCD Ligne 1106 : #define LCD_BED_LEVELING Permet de faire le leveling si vous avez un des modes cités au dessus activé. Si vous avez activé le Mesh Leveling (manuel), Marlin vous guidera étape par étape via l'écan LCD pour faire le leveling. Requiert environ 1 ko. Déplacement de la tête automatique Ligne 1114 : #define LEVEL_BED_CORNERS Depuis l'écran LCD, permet de faire bouger la buse automatiquement pour faire le réglage aux 9 points du plateau en leveling mauel. Nécessite 1200 octets. Fonctions additionnelles Préchauffage J'ai lu encore récemment qu'on pouvait gagner de la place en commentant les fonctions de préchauffage de PLA et ABS. Bien que je les trouve utile, voilà comment gagner 40 octets. Oui, pas un de plus, 40... Commentez les lignes 1262 à 1268 : #define PREHEAT_1_TEMP_HOTEND 210 #define PREHEAT_1_TEMP_BED 60 #define PREHEAT_1_FAN_SPEED 0 // Value from 0 to 255 #define PREHEAT_2_TEMP_HOTEND 235 #define PREHEAT_2_TEMP_BED 80 #define PREHEAT_2_FAN_SPEED 0 // Value from 0 to 255 Il vous faudra également commenter ces lignes dans le fichier configuration_store.cpp, à la ligne 1820 : #if ENABLED(ULTIPANEL) lcd_preheat_hotend_temp[0] = PREHEAT_1_TEMP_HOTEND; lcd_preheat_hotend_temp[1] = PREHEAT_2_TEMP_HOTEND; lcd_preheat_bed_temp[0] = PREHEAT_1_TEMP_BED; lcd_preheat_bed_temp[1] = PREHEAT_2_TEMP_BED; lcd_preheat_fan_speed[0] = PREHEAT_1_FAN_SPEED; lcd_preheat_fan_speed[1] = PREHEAT_2_FAN_SPEED; #endif Notez que mes valeurs ne sont plus celles par défaut. Plutôt que de les virer, j'ai renommé 'ABS' en 'PETG' dans les fichiers de langue, bien plus utile que de tout supprimer pour gagner une misère. Je ne recommande absolument pas de toucher aux fichiers cpp, à vos risques et périls. Modifier les valeurs de l'EEPROM Ligne 1230 : #define EEPROM_SETTINGS Permet depuis votre PC relié à l'imprimante ou l'écran LCD de modifier la vitesse max, accélérations, jerk, steps/mm, offset Z etc etc Si vous êtes certains de ne plus toucher à ces réglages ou de flasher à chaque fois votre imprimante pour les modifier, vous pouvez commenter cette ligne afin de libérer 5.7 ko Récupérer les valeurs de l'EEPROM Ligne 1231 : #define DISABLE_M503 Pour gagner 2800 octets, il faut ACTIVER (ne pas commenter) cette ligne. Permet depuis un terminal de récupérer les paramètres de l'EEPROM (accélération, vitesses, steps/mm, ...). Nettoyage de la buse Il existe une fonction permettant avant chaque print de nettoyer la buse en l'envoyant à un point spécifique de votre plateau (ou légèrement en dehors). Voilà par exemple la réalisation de notre ami @Jean-Claude Garnier qui envoie sa buse se faire polisher sur une brosse à dent : Pour l'activer, ligne 1328 : #define NOZZLE_CLEAN_FEATURE Nécessite 1.7 ko Carte SD Pour ceux qui n'impriment que via PC ou Raspberry, sachez qu'il est possible de désactiver le support de la carte SD. Commentez la ligne 1433 : //#define SDSUPPORT Cela vous libérera presque 17 ko dans la carte de l'imprimante, mais impossible d'utiliser la carte SD.. Pour les extrêmes Encore une fois, si vous n'imprimez que depuis le port USB de votre imprimante, il se peut que vous n'ayez même pas besoin de l'écran. Par exemple, en désactivant l'écran LCD de mon Anet, ligne 1757 : //#define ANET_FULL_GRAPHICS_LCD Cela me fait économiser 39 ko de mémoire que je peux réutiliser ailleurs. Mais je n'ai plus d'écran, tout se fait depuis le PC ou le Raspberry. Voilà pour le fichier de configuration.h, j'essayerai de faire configuration_adv.h dans les jours à venir. N'hésitez pas d'y aller de vos retours si des passages sont à améliorer, réctifier ou clarifier.
 1 point
1 point -
Bonjour a vous tous ! Voila ça fait maintenant quelque mois que je possède une DiscoEasy 200. Et comme vous, j'ai apporté des modifications grâce à ce forum (Merci les gars ) pour améliorer la belle mais voila le language du MARLIN est pour moi un mélange de Chinois et de Russe... Suite au différente version constructeur et utilisateur, je perdais beaucoup de temps retrouver le bon sujet, la page qui mentionne la bonne ligne de code qui m'intéresser ... Partant de ce problème, j'ai décider de me constituer une sorte d'aide mémoire que je souhaite partager avec vous ! J'espère que cela vous aidera ... -------> Option Marlin.docx1 point
-
bas chez moi non , bon @CacaoTor a raison ! je viens d'entendre encore le claque , donc la courroie saute d'une dent :x maintenant la question est : courroie trop tendu ou pas assé :x1 point
-
lol @fdorful et pourtant tous ceux qui on du leroymerlin en sont content1 point
-
Je confirme mes paramètres cités précédemment en imprimant un nouveau support de flexible de câbles pour ma tête de hotend - une pièce plutôt technique donc - et je suis en vitesse 120 mm/s, jerk à 20, accélération à 450 mm/s². Tout se passe nickel et j'en suis à 85% du print (plus d'1h écoulée). Par contre, ça demande un Y irréprochable en tension de courroie/galets, ainsi que des voltages nickels sur le moteur (j'ai pas vérifié ces paramètres, mais la machine est neuve et réagit plutôt bien depuis le début donc je présume que c'est bien réglé). Donc, comme c'est une machine assemblée avec certains composants de qualité moyenne je vais devoir baisser un poil mon accélération pour du plus long terme.1 point
-
Programme de demain: Virer les TL-smothers Régler les V-ref en suivant le tuto d'Acidounet Et égorger un poulet peut être.1 point
-
V07. Par pitié edit tes messages par contre1 point
-
Tu as recollé les couches décalées on voit la colle1 point
-
Sur s3d il y a des paramètres de déplacement quand ça imprime pas. Sur cura aussi sûrement. Sinon notre u20 est quand même dérivée de la cr10. Pkoi ne pas reprendre de base les réglages du lien de @CacaoTor a savoir http://www.cr10.fr/le-guide-malin-de-marlin/1 point
-
je vire le dampers et je retest :x1 point
-
Bonjour, C'est jouable à l'air chaud avec une buse carrée adaptée à la puce. Effectivement, une protection avec du Kapton des composants autour ne serait pas un luxe.1 point
-
Un peu de recul sur la pièce imprimée. Punaise le support ventilo est HYPER MEGA SOLIDE. @deamoncrack Entre les épaisseurs que tu as utilisées et le PLA870 c'est le jour et la nuit. Je vais réimprimer le reste tant qu'à faire.1 point
-
T'inquiètes, il ont le cuir épais.....1 point
-
Je te conseillerai bien celui-ci (il ne faut l'imprimer que le 1/04)
 1 point
1 point -
y pas de commit.... j'ai pas pushé sur le git... J'affine les réglages ce WE #define DEFAULT_MAX_FEEDRATE { 200, 200, 100, 25 } /** * Default Max Acceleration (change/s) change = mm/s * (Maximum start speed for accelerated moves) * Override with M201 * X, Y, Z, E0 [, E1[, E2[, E3[, E4[, E5]]]]] */ #define DEFAULT_MAX_ACCELERATION { 350, 350, 20, 3000 } /** * Default Acceleration (change/s) change = mm/s * Override with M204 * * M204 P Acceleration * M204 R Retract Acceleration * M204 T Travel Acceleration */ #define DEFAULT_ACCELERATION 300 // X, Y, Z and E acceleration for printing moves #define DEFAULT_RETRACT_ACCELERATION 300 // E acceleration for retracts #define DEFAULT_TRAVEL_ACCELERATION 300 // X, Y, Z acceleration for travel (non printing) moves1 point
-
Mon bltouch est en cours d'acheminement mais j'ai ma copie chinoise qui m'a servie pour les tests en attendant ça fera l'affaire ! Par contre je suis un peu perdu à force ! Je cherche à changer mes ventilos car j'en ai grille un et j'en ai marre de cet aéroport à côté de moi dans mon bureau ! Du coup j'ai pas mal lu le super thread de @CacaoTor et je vais sûrement te contacter en mp bientôt sur ce sujet si tu as encore du temps libre avec tout ça ! Je m'interroge sur le fang du coup mais vous m'avez un peu perdu comme je disais ! Actuellement le hotend d'origine n'est pas compatible avec le support pour bltouch modélisé c'est bien ça ? Il faut impérativement un e3dv6 (que je connais pas, je ne me suis pas spécialement documenté hotend !) @deamoncrack il est prévu après les tests de @CacaoTor de rendre le fang + bltouch + hotend d'origine compatible ? Super boulot dans tout les cas !1 point
-
Ok ca restera comme ça ! @CacaoTor il faudra juste recompiler des v11 et v12 .1 point
-
Bonjour, Pour les dissipateur, ça permet de soulager le raspberry au niveau de ces températures donc c'est un plus. Tu peux très bien imprimer un boitier pour lui, ca fonctionnera tout aussi bien (en prenant en compte la taille du dissipateur si c'est pas un low profile) Avec octoprint tu peux contrôler ton imprimante a distance sans problème. Lui demander d'imprimer un fichier, l'arrêter et même avoir un état de l'impression tout les 5/10/15% d'impression. Pour moi octoprint est vraiment un confort, je n ai plus besoin d'allez à l'imprimante pour y mettre les fichiers etc etc (hormis preparer le plateau) petit edit: au niveau de la gestion aussi, si tu te débrouilles bien avec un raspberry et que tu lui couples un module 4 relais tu peux la rendre entièrement autonome (hormis préparation plateau) pour simplifier tu lui dis d'imprimer tel fichier, le raspberry va l'allumer (relais sur le 220V de l'alimentation) allumer la board et entamer la chauffe/print. après avoir finit son print, le rapberry va couper la board mais gardera l'alimentation en fonction pour terminer de refroidir la tête/board etc et la coupera par la suite. bon il faut des plugins sur octoprint un peu de test etc etc mais ça se fait (la mienne fonctionne comme ça) http://zupimages.net/viewer.php?id=19/17/qpn3.png1 point
-
Intéressant.... d ici un à 2 mois quand les sources marlin auront évolué on pourra refaire un package ... 2 mois de vacances! Yeeeessss il reste juste le petit capteur de filament. Je testerai ça la semaine prochaine. en photo 6h de print. Plein à 100%
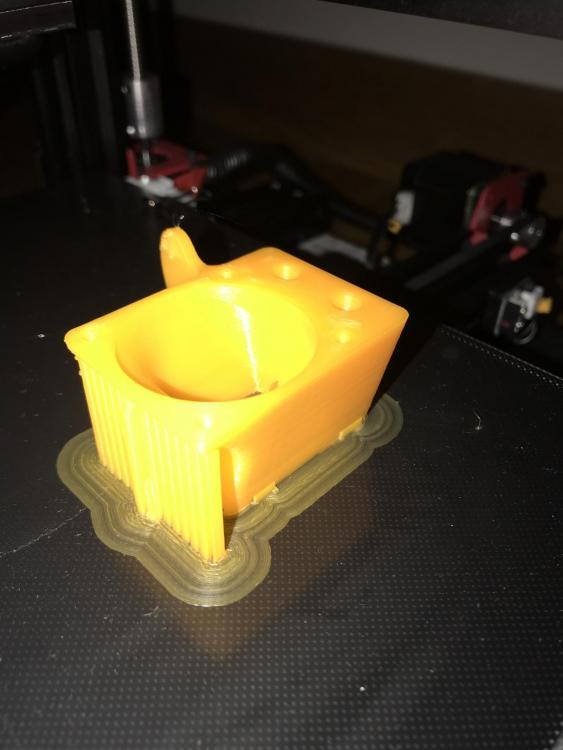
 1 point
1 point -
edit: le double moteur Z demande 2x plus de courant... faut monter le vref si tu utilises un multiplicateur de prise moteur1 point
-
Reposez vous un peu, vous l'avez bien mérité. Pour les réglages de nos machines, on y arrivera nous même, vous nous avez fourni l'outil, on va apprendre à s'en servir. Un grand merci à la team;1 point
-
Je pense surtout qu'il y a un triple facteur possible voir plus. Et que tout tester prendrais un temps fou... La solution n'est pas non plus de contourner, mais solutionner. Les paramètres d'origine de la U20 semblent ne pas convenir pour certains sous Marlin. Différences de cartes-mères ? ET/OU Usure ou calage mécanique ? ET/OU bug Marlin ? ET/OU configuration marlin@débridage des vitesses ? ET/OU problème entre la chaise et le clavier ? Vu qu'on sors du dev du portage, je pense que les discussions peuvent s'arrêter ici et reprendre sur le topic dédié, pour continuer si vous le désirez cette conversation ici : Excepté, en ce qui me concerne, la finalisation du BL et de la MAJ du tuto, ça s'arrête là pour l'instant. Je sais que les autres (@Hobi @Epsylon3) ont aussi levé le pieds et profitent maintenant de leurs machines La "team" se met en pause et vous dit à bientôt (la suite sur le sujet au dessus). 66 pages, 1304 réponses, 51 058 vues quand même ! Merci !1 point
-
Salut, Je viens de vérifier de mon côté et... effectivement il y a une inversion par rapport au principe. Dès lors, la séquence d'initiation fonctionne normalement. La ligne a corriger est contenu dans le paragraphe suivant : // Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup). #define X_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Y_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Z_MIN_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop. //LEPPO : valeur origine True //#define X_MAX_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop. //#define Y_MAX_ENDSTOP_INVERTING false // set to true to invert the logic of the endstop. //#define Z_MAX_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Z_MIN_PROBE_ENDSTOP_INVERTING false // set to true to invert the logic of the probe. //LEPPO : valeur origine True Je vais vérifier les autres fonctions... Merci @Fourmi1 point
-
Si tu utilises Cura, tu n'aurais pas fait joujou avec les paramètres de la section Expérimental (impression filaire)? Sinon, vu le peu d'informations que tu fournis, on est obligé de jouer les Quel pièce essaies-tu d'imprimer ? Un lien vers le fichier .stl nous permettrait de voir / vérifier que ce n'est pas lui qui est prévu comme tel.
 1 point
1 point -
@divers <Mode humour> Tu n'oublierai pas par hasard, le plus toxique de tous: l'air qui contient en grande quantité de l'oxygène or on sait tous que c'est un gaz très dangereux (mélangé à l'hydrogène + une étincelle et BOUM, sur les métaux il les oxyde (la rouille), etc.). Donc il faudrait arrêter de respirer . </fin mode humour> On le sait tous que l'environnement dans lequel on vit peut être plus ou moins toxique. Mais pour en revenir à la question posée: le PLA et sa nocivité, quelques règles de bon sens comme celles rappelées par @bernard3D sont bien suffisantes. Après ça reste mon avis: si l'on devait arrêter de manger / boire / faire tout ce qui est dangereux, qu'est-ce qu'on s’embêterait .1 point
-
La somme des puissances des alims est de 840W. En comptant un rendement de 90% la puissance consommée est légèrement inférieure à 1000W. Le fusible d'entrée sur le 220V devrait être de 4,3A. Un 4A fera l'affaire. Les alimentations à découpage ont un limiteur de courant: elles se couperont si la consommation dépasse les 10 ou 25A. Un fusible protégera le câblage ou l'élément alimenté. Un mot sur les fusibles: Un 10T (10A temporisé) ne claquera que si la consommation dépasse: - 13A pendant 1 minute. - 20A pendant 5 secondes. - 100A pendant 0,1 seconde. Dans tous les cas l'alimentation aura coupé d'elle-même avant le fusible.1 point
-
##################################################### # there are advanced options to configure a pin: # ! invert pin # o set pin to open drain # ^ set pin to pull up # v set pin to pull down # - to set no pullup # @ to set repeater mode # # NOTE Lines must not exceed 132 characters # #################################################### et un tuto sur les pull up - pull down :1 point
-
Pas de soucis n’hésitez pas à me pinger au besoin Et félicitation pour ce sujet qui est "ouf" (enfin je disais ça quand j’étais jeune il y a bien longtemps ^^ ) J'attends ton retour sur les couroies pour les ajouter dés que tu valide que c'est "d'la balle" j'ajoute (oui je suis dans ma période revival année 80 ^^)1 point
-
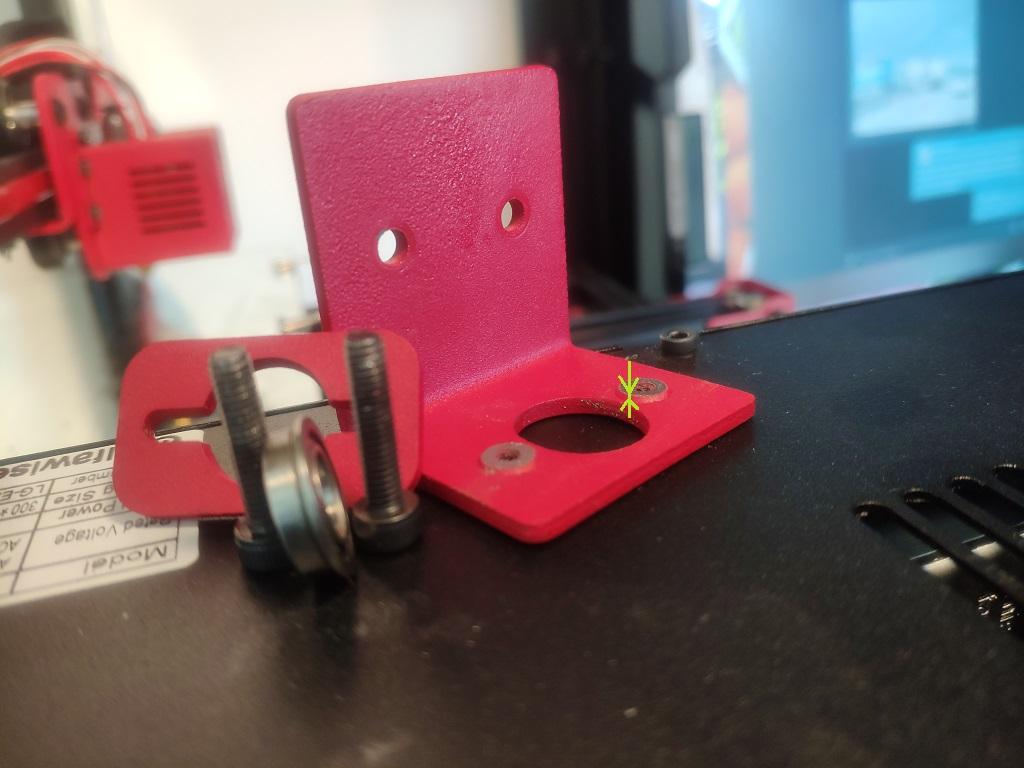
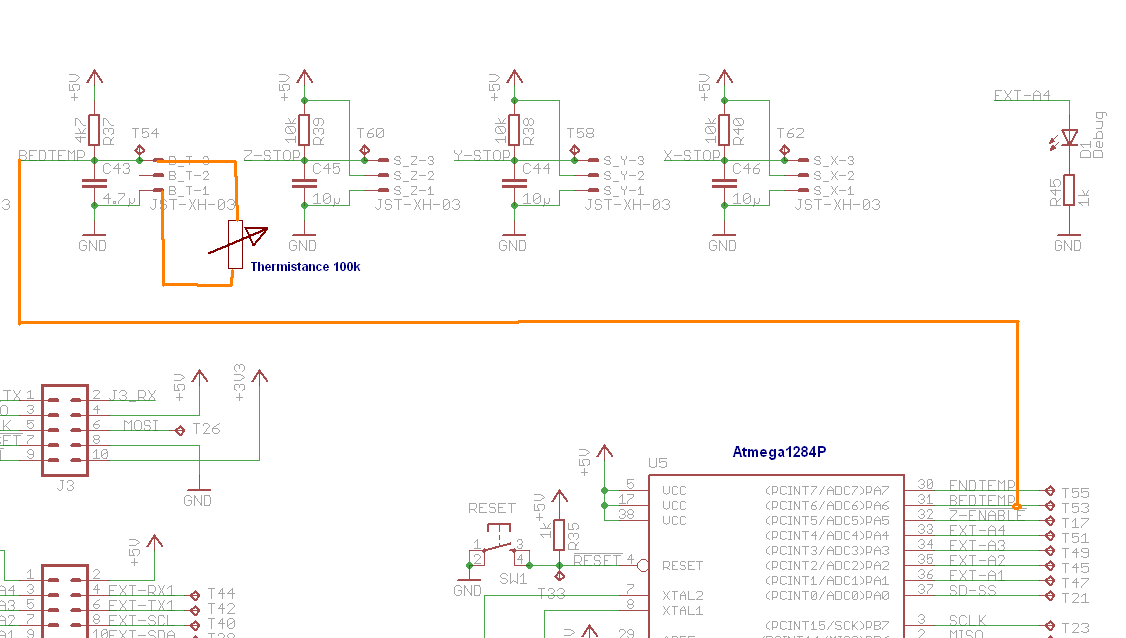
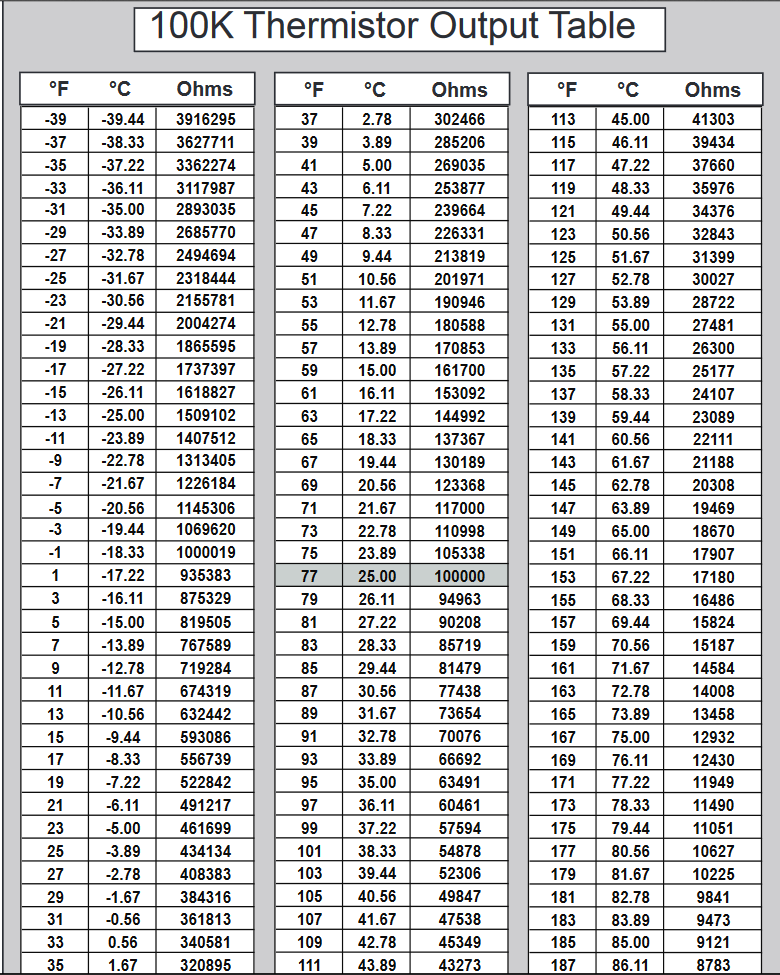
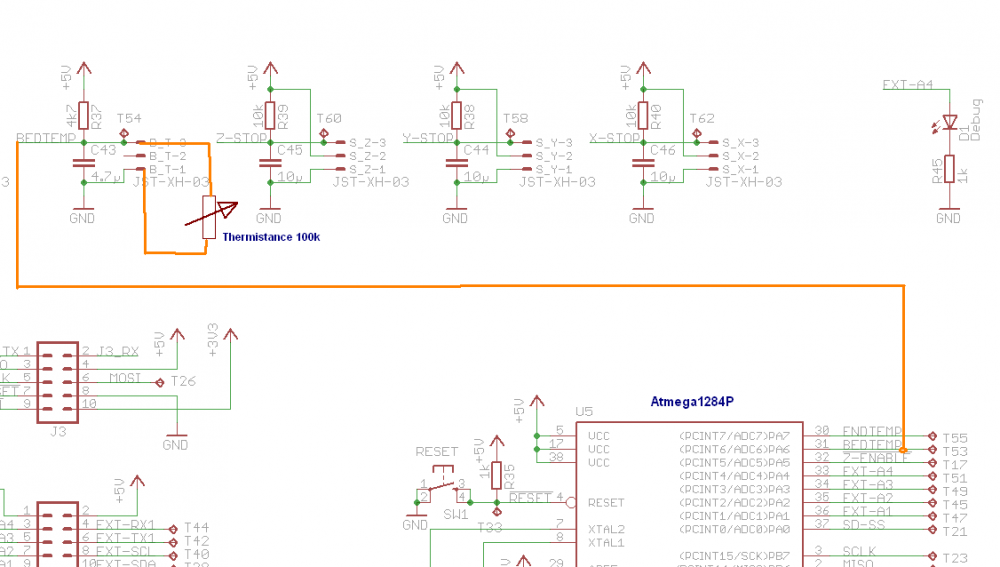
Bonjour à tous, Ce matin, un peu de technique sur le raccordement de la thermistance (la sonde de température si vous préférez) avec une parie de schéma. J'ai fait figurer la thermistance ainsi que ses connexions (en orange) qui ne sont pas représentées sur le schéma d'origine. Une petite explication du fonctionnement de ce circuit : La résistance R37 de 4k7 et la thermistance forment ce que l'on appelle un pont diviseur de tension entre le 0 (GND) et le +5V. On récupère la tension issue de ce pont diviseur au point commun (T54) et on l'injecte sur une entrée analogique du microcontrôleur Atmega1284P Si le thermistance vaut 100k (c'est sa valeur théorique à 25°C), alors la tension au point (T54) est égale à Rthermistance/(R37+Rthermistance ) x 5V soit (100000/4700+100000) x 5 = 4.775V Si la thermistance est en court-circuit donc égale à 0, la tension (T54) sera de (0/4700+0) x 5 = 0V Si la résistance est coupée (valeur infinie mais pour le calcul on va mettre 100000000000 Ohms) la tension (T54) sera de (100000000000/4700+100000000000) x5 = 5 (4.999999999 en réalité avec ces valeurs) Maintenant comment le Atmega1284P interprète-t-il ces valeurs? L'entrée analogique (T55) interprète la tension (T54) comme la tension fractionnaire entre sa tension de référence +5V et 0V, exprimée en nombre de pas (généralement 0 à 1023) suivant la résolution du convertisseur analogique digital (généralement 1024 ou 10 bits.) Pour une tension de référence de 5V, chaque pas vaudra donc 5/1024 soit 0.004882 V. Si Rthermistance = 100k (sa valeur à 25°C), alors la valeur converties sera de 1024 x tension (T54) / 5V soit 1024 x 4.775 / 5 = 978 pas A 50°C, la thermistance vaut 32843k et la tension (T54) vaut (32843 / 32843 +4700) x 5V = 4.374V Et le nombre de pas générés vaut 1024 x 4.374 / 5 = 896 pas Voilà, j'espère ne pas vous avoir trop soulés avec ces formules et avoir été clair dans mes explications... J'ai ajouté le tableau de variation de la valeur de la thermistance en fonction de la température Edité : ce tableau est un exemple, il ne reflète peut-être pas les caractéristiques de la thermistance utilisée sur notre Anet, mais le principe de calcul reste identique.
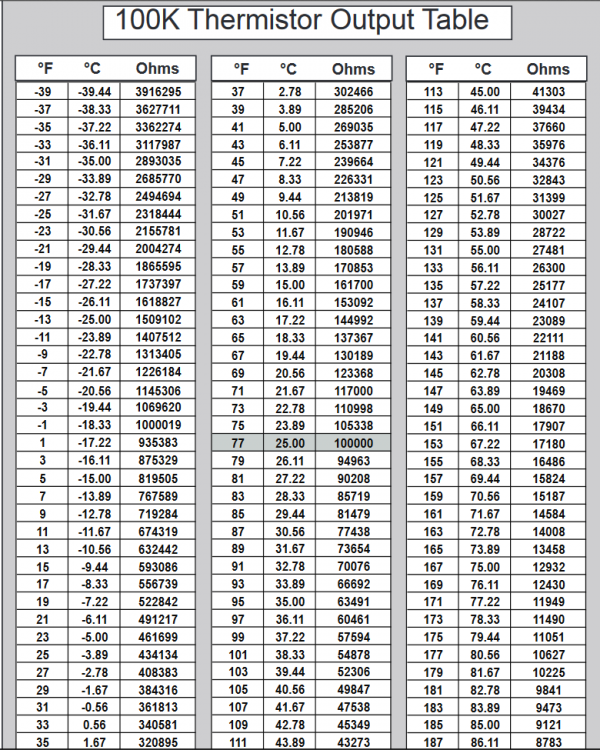 1 point
1 point -
Oui on parle bien de celui-là, connu aussi sous le nom de Sakata ou Ingeo. Tu as 870 et 850, 870 étant le plus balaise. Franchement depuis que j'ai appris à m'en servir, plus possible de m'en passer pour les pièces qui demandent de la solidité. @jipee est devenu pro avec ce filament Si @filament-abs.fr passe par ici, merci pour le support0 points