Classement


Contenu populaire
Contenu avec la plus haute réputation dans 17/09/2022 Dans tous les contenus
-
@gerardmBienvenue au club ! tu dois aller te cacher au fond de la forêt .... Sinon : Je propose une attache pour sac à dos ... (bah oui quoi, le piège c'est que c'est pas fait pour attacher autre chose que lui-même (le sac à dos) , faut pas prendre @methylene67pour un bleu ........ )5 points
-
Ça sert à quoi un sac à dos (sac ado ?) ? OK, je suis parti me promener sans sac3 points
-
Il y a beaucoup de boulot derrière mais ça donne presque envie de suivre son exemple...2 points
-
Tu caricatures exeuprès. Moi je navigue sur ça et j'ai jamais mis de docksides, plutôt bottes et ciré. (PS c'est pas le mien hein.... je suis juste inscrit sur le rôle d'équipage)2 points
-
Tout à fait, mais j'ai une préférence pour les tout petits ... Je trouve ça bien plus fun et plus de sensations. Et je ne parle pas de la mise en oeuvre... Donc je reste sur dériveur (disons de plage, car il en existe des gros) et catamaran de sport. La voile en polo, pantalon et Sebago, ça n'est pas pour moi. Oui ... J'aime prendre des bains et être mouillé !2 points
-
Ben voila, après un Artisan super outillé (3 en 1), maintenant tu lorgnes du coté du Pro du plateau...on est parti pour faire tous les corps de métier ! et ses plateaux2 points
-
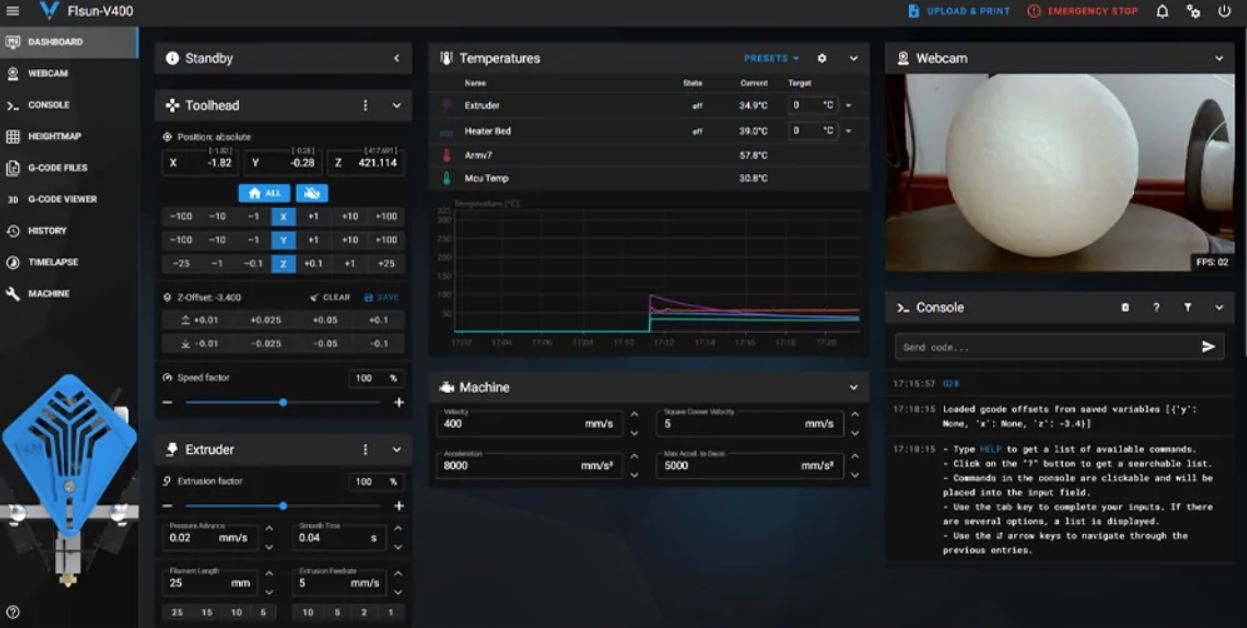
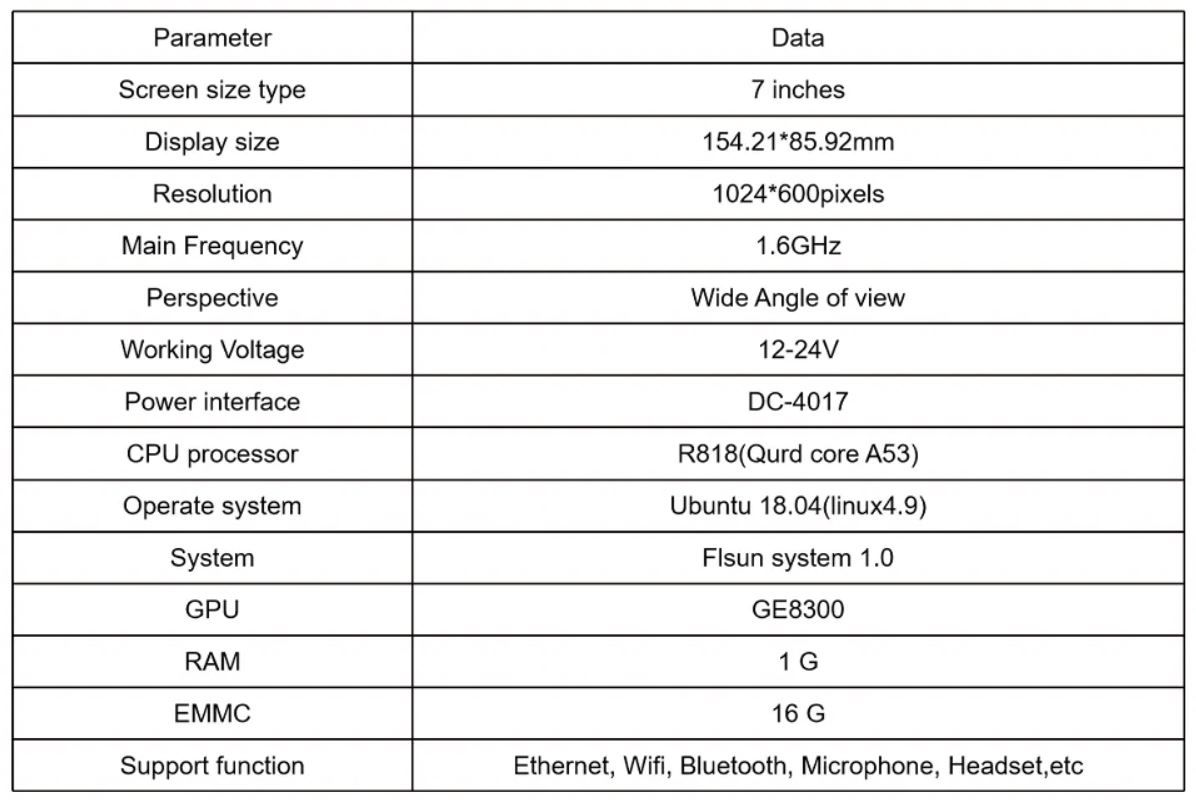
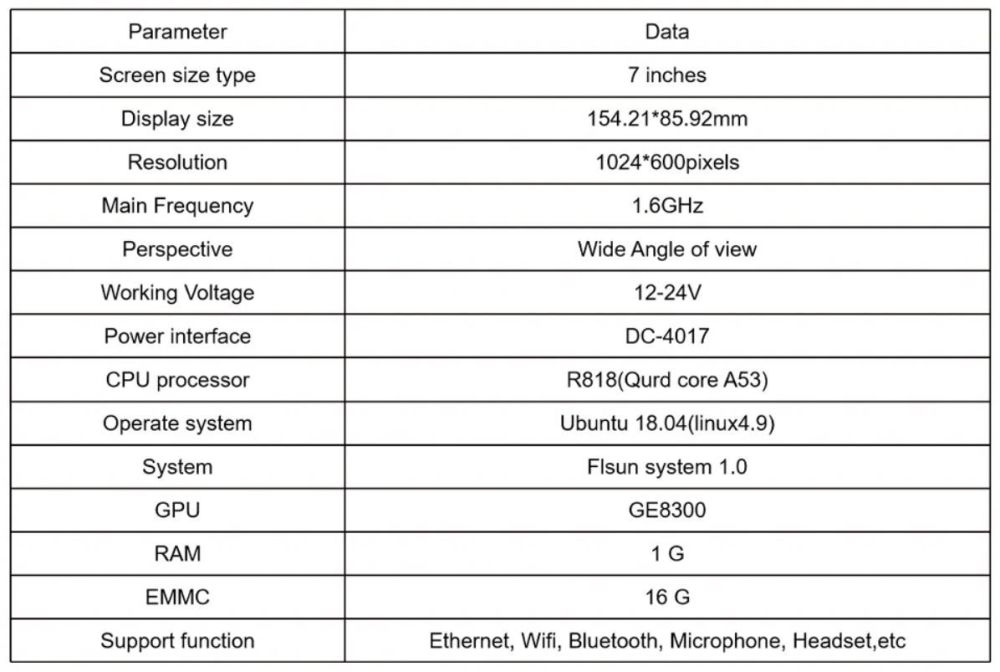
Le FLSun Speeder Pad est en vente à un tarif préférentiel (119$ au lieu de 189$) pour le premier batch de 500 exemplaires directement chez FLSun ! Cet écran sous Klipper que vous avez pu découvrir dans mon test de la FLSun V400 a pour avantage de proposer une expérience du fameux firmware Open Source sans aucune ligne de commande à taper et surtout dans un format "unifié" avec l'écran et la puissance de calcul ne faisant qu'un (contrairement à un Raspberry Pi - introuvable à prix décent - couplé à un écran externe). Les avantages du Speeder Pad Klipper c'est avant tout vitesse et précision. Le SpeederPad ajoute un bel écran 7 pouces tactile ultra réactif, la connectivité Wi-Fi et la possibilité de surveiller les impressions à distance tout en réalisant des timelapses avec une caméra (non fournie). Contrôle à distance multiplateforme Grâce à l'interface web embarquée (mainsail), vous pouvez lancer et surveiller une impression à distance depuis un ordinateur, une tablette et même un smartphone quelque soit le constructeur et le système d'exploitation (PC, Mac, iOS, Android, iPad, iPhone, etc.). Jusqu'à 9 profils d'imprimante et 3 connectée en même temps Le Speeder Pad supporte une grande majorité des imprimantes 3D FDM du marché. Il suffit en effet d'avoir le bon fichier de configuration Klipper. On peut avoir jusqu'à 9 imprimantes 3D enregistrées dans le Pad et 3 (le nombre de ports USB disponibles) pilotées en même temps ! Toutes les caractéristiques techniques du Speeder Pad Conclusion Face au prix actuel du Raspberry Pi 4 (sans écran), le Speeder Pad est une très bonne alternative pour découvrir Klipper sans peiner à l'installer et le configurer. Cependant, cette nouvelle version standalone n'est pas (encore) rootable et donc quelque peu limitée pour les makers qui aiment bidouiller...






 1 point
1 point -
Je trouve l'idée de l'imprimante avec axe Y infini très sympa, mais j'ai l'impression que cela n’intéresse pas les fabricants ni les utilisateurs. Je pense que l’accroche sur la bande transporteuse ne doit pas être des plus simples et des plus fiables (ce n'est qu'un pressentiment). @fran6p sur ton profil je vois que tu en as une, l'utilises-tu régulièrement , occasionnellement, ou jamais. Quels défauts ou qualités lui trouves-tu à l'usage.1 point
-
Bonsoir, Moi perso sur la mienne, je l'ai installé sans condamner le circuit de la Led, j'ai donc tirer les cinq fils depuis la tête jusqu à la carte mère. Le tout passe dans une gaine nylon que l'ai fait courir dans les profilés alu du X et du Z. Le mens est installé sur la gauche de la tête, c'est le montage Waggster, par contre c'est la merhodd de câblage de Guerro. Pour le firm c'est MrMagounet qui me l'avait fournis, il fonctionne très bien. Tu verras, MrMagounet est "the reference" pour les artillery. Cordialement. Aldo1 point
-
Et voilà ... J'ai encore joué dans rien avoir à proposer ... Quelqu'un pour prendre la relève ? Marrant, je n'ai jamais eu ce souci, et pourtant j'ai déjà quelques centaines de milliers de kilomètres en moto avec quasi toujours un sac à dos ... Du petit 20 litres au 65 litres et même jusqu'au parapente !1 point
-
Tout à fait Monsieur. En fait j’utilise un sac Quechua pour la randonnée pédestre et VTT mais aussi pour la moto. Et pour cette dernière activité, malgré le fait que je ne dépasse pas les 80 km/h , les lanières de réglage tapent dans le casque (quelle idée de les faire aussi longues), et pas de dispositif pour les attacher (j’ai bien essayé de les enrouler autour de celles qui tiennent le sac mais ça finit toujours par se défaire). Du coup, l’impression 3D servant à cela pour moi avant tout, 5 petite minute de réflexion autant de modélisation et un petit peu plus d’impression (en TPU) et le schmilblick était né.


 1 point
1 point -
Ça c'est sur les petits voiliers. Sur les gros y'a des coulisseaux (je pinaille je pinaille...)1 point
-
Tu as essayé avec un autre trancheur ?1 point
-
Cool super News , oui sur le dernier firm tft y a un soucis de passer en langue secondaire si vraiment le Fr est important je peux te dire quels version changer mais pour être honnête c'est assez simple a comprendre même en Anglais1 point
-
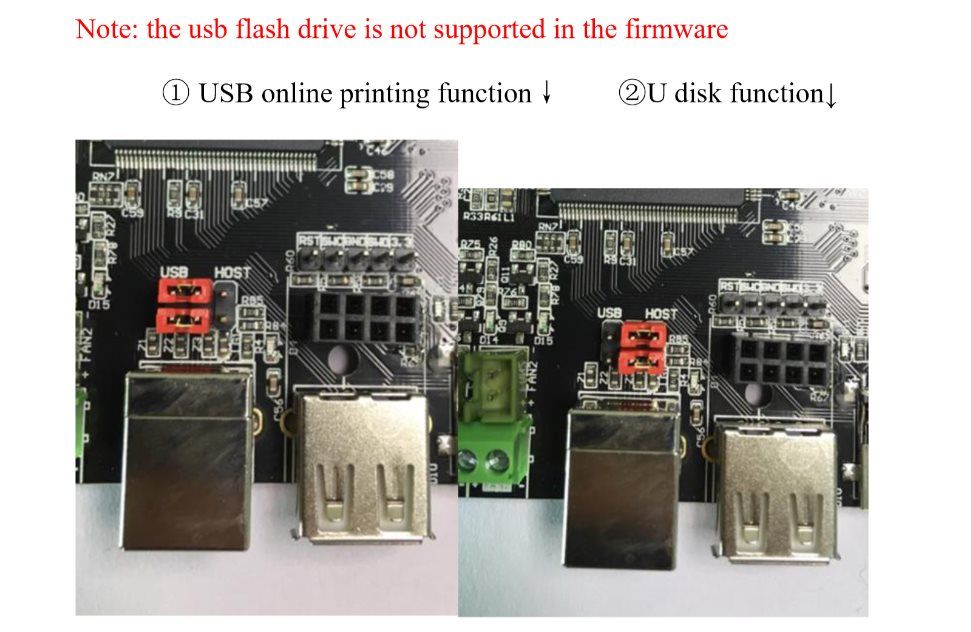
D'après le manuel, il n'y a que deux possibilités de placer les cavaliers: tous deux d'un côté ou de l'autre mais pas en mixant De toute façon, le firmware ne gère pas l'impression de fichiers via la clé USB (c'est écrit en rouge).
 1 point
1 point -
Je faisais référence au stock de V400 dont le site certes encore en phase de finition est tout à fait legit1 point
-
En effet...1 point
-
c'est un Français exiler au fin fond de l'europe qui a créer cette marque qui développe des imprimantes base sur le projet Open Source utiliser par Josef Prusa a la conception des MK3S. Donc ici qui a un machine comparable (de meilleur qualité que les clone chinois), et qui propose différent format de taille d'impression la MK300 est une MK3S de 290x290 de plateau et la Evo300 est une MK300 mais sous fonctionnant sous Klipper1 point
-
Salut, Si tu ne l'as pas déjà fait, regarde ici:1 point
-
Hello, la pré-version 4.4.0 est dispo sur le forum (et le Gitub): snapmaker-luban-v4-4-0-pre-release Edit: l'Artisan est bien dans le menu1 point
-
Faut surveiller le site FLSunFrance, nous ont annoncé avoir du stock d'ici peu !1 point
-
Pour un parasol? Oups comme dab je suis resté à la page 390 !1 point
-
Y'a aussi le côté 'produit fini' qui est très sympa. Mon Speeder Pad de chez FLSun est autrement plus sexy que mon Pi 4 et son écran séparé ^^1 point
-
Il y a de nombreux écueils en Français1 point
-
@methylene67 et @jcjames_13009 vous venez ce week-end au pèlerinage à Prague afin de prier tous ensemble pour notre bon St Josef Prusa. N'oubliez pas vos chapelets imprimés en PLA Prusament blanc. Josef récitera des passages du second évangile, les moments de l'avènement de la MK3. Ahhhhh, je crois que je suis possédé par l'esprit de Josef.1 point
-
En plus nous avons quelques grands devins sur ce forum. Une mine d'or vous dis-je1 point
-
Bonjour, J’ai terminé le gros de la préparation de la coque et j’ai passé deux couches d’apprêt. Je vais encore faire un léger ponçage à l’eau avec du papier de verre très fin, grain 1500 et je pourrais passer à la peinture. Le bateau sera de 2 couleurs comme mon précédent, bleu et blanc. Il faut encore que je réfléchisse au motif que je veux faire, mais j’ai déjà ma petite idée. Si je me souviens bien, il faut d’abord passer la couleur la plus foncée et terminer par la plus claire ? Pendant que j’étais à la préparation, j’en ai profité pour faire le couvercle, mais je viens de m’apercevoir qu’il fallait que je fasse une petite retouche dans un angle. Bon, j’ai un peu honte de vous montrer les pilotes qui sont loin d’être parfaits, mais il faut dire que je n’ai fait aucun post-traitement et je ne suis pas très doué en peinture ! Je suis passé directement à l’apprêt et la peinture. J’aurais dû au moins enlever les petits défauts d’impression, ça m’aurait simplifié la tâche et aurait donné un meilleur rendu. À bientôt pour la suite...1 point
-
Si ta tête de vis était chanfreinée genre vis agglo, tu aurais un angle genre 45 degrés et ça pourrait passer avec des paramètres basiques. Mais avec un rebord bien plat comme ça ... tu vas vite savoir si tes paramètres de surplomb sont nickels ... ou pas !1 point
-
McLaren, Whirlpool, Lynxter, Eryone, Anycubic et Creality sont les entreprises qui ont marqué l'actualité de la semaine en impression 3D ! https://www.lesimprimantes3d.fr/semaine-impression-3d-349-20220916/1 point
-
C'est vrai que dit comme ça c'est beaucoup plus clair, merci @Titouvol Nan je déconne je n'ai rien compris non plus Je n'ai pas d'objet a proposer, mais je me lance quand même : Ce sont des pinces utilisées pour une activité que je n'ai plus pratiquée depuis ... mes 10 ans il me semble, la découverte du solex et des truc à moteur en général, m'ayant brutalement détourné de toute activité sportive éreintante Autrefois des pinces à linge fonctionnaient très bien, mais maintenant ce seraient des trombones ? Donc des pinces à pantalon ! C'est mon dernier mot.1 point
-
J'ai fait de la voile (il y à très longtemps) et tout se que je me rappel, c'est de ne pas oublier de se baisser pour pas prendre la baume dans la gueule.1 point
-
@fran6p certes mais on frôle l'abus de langage ... Ralinguer c'est mettre la voile de manière à ce qu'elle ne prenne le vent ni d'un côté ni de l'autre. Faseiller c'est le fait que la voile flotte voire claque au vent ... lorsqu'elle est ralinguée. (mais je t'accorde qu'on entend parfois ralinguer pour faseiller) Pour les non voileux, la ralingue c'est le cordage attachée à la voile côté mat et qui coulisse dans l'engougure du mat lorsqu'on hisse la voile.1 point
-
Pas faux mais une fois réglé, ça tient. C'est le problème majeur de ces modèles, de nombreux utilisateurs ont revendu leur modèle pour ce souci. Très occasionnellement, ne faisant ni production en séries ni adepte de cosplay uniquement la plupart du temps pour vérifier qu'elle fonctionne toujours correctement Son principal défaut concerne la vitesse d'impression «relativement» lente. Un second défaut concerne le peu de matières imprimables (PLA, PETG, TPU (difficile) à cause de sa structure ouverte à tous les vents. Ses principales qualités: permettre l'impression de certaines pièces sans nécessiter de supports là où même après réorientation sur le plateau une FMD «classique» en aurait besoin comme l'impression se fait en biais (45°), la résistance structurelle verticale de la pièce imprimée est plus importante (au doigt mouillé sans avoir fait de tests pour le vérifier ou pas) structure rigide et solide (elle est lourde) core XY1 point
-
À part quelques mordus qui ont fait beaucoup de modifications dessus, je n'ai pas l'impression que ça ait la côte, d'ailleurs Creality n'a pas sorti de nouveaux modèles depuis la CR30 (je crois), alors qu'on a eu 25 modèles d'Ender 3 V2 Neo S1 Max Pro Plus (etc.) Par contre certains arrivent à les utiliser en production, comme par exemple la société Repkord aux USA. Ils vendent des kits de modification de la CR30 (rail linéaires, direct drive, montage au mur, modifications moteur, bacs de récupération, buses modifiées) qu'ils utilisent eux-mêmes pour la production de différents éléments. Ça donne ce qu'on voit dans la vidéo ici où ils impriment en chaîne des glissières en CF-PETG ou encore la photo ci-dessous :
 1 point
1 point -
Un labyrinthe pour fourmis...1 point
-
Salutation et bienvenus sur le forum ! Je suppose que tu parle d'une "Anycubic Kobra Max". Courage les début en impression 3d sont pas forcement simple. Il faut prendre sont temps, persévérer, ... et ce focaliser sur ce que l'on apprend plutôt que sur le résultat. La procédure de leveling ( voir le test https://www.lesimprimantes3d.fr/test-anycubic-kobra-max-20220406/ ) semble identique a celle de la de la "Kobra Plus" dont voici une vidéo ( en anglais (mettre les sous titre et la traduction ...) , positionné sur l’étape de leveling pour voir comment cela fonctionne normalement ... Y a t'il des déplacement ou riens ne bouge après le contacte sur la buse avec un outil au début de la procédure de leveling ? Peut tu mettre une photo de comment se trouve clipsé le câble sur la tête d’impression ? ( histoire de vérifier qu'il n'y a riens de louche ... ) Arrive tu a effectuer des déplacements ( X et ou Y et ou Z ) via l'écrans de contrôle de l'imprimante? ( pour vérifier que les moteurs fonctionne ... bine noter que avant un Home ou un levelling il se peut que les seul mouvements possible soit dans une seul direction )1 point
-
Bonjour, Je vais vous faire part de mon expérience avec Klipper et vous expliquer comment l'installer et le configurer sur votre imprimante. I - Introduction Klipper est un firmware pour imprimante 3D comparable à Repetier ou Marlin. Son rôle est d'interpréter le Gcode en provenance du slicer et de le convertir en commandes qui permettent de piloter individuellement le hardware de l'imprimante. Pour certaines machines, comme les CoreXY ou les Delta, la cinématique est très complèxe, ce qui demande des calculs importants. Malheureusement, avec une carte 8-bits, la puissance du microcontroleur n'est pas super adaptée à ces calculs. Du coup, la vitesse sera limitée par la puissance du processeur et les calculs seront moins précis. C'est ce qui pousse certains à vouloir passer à une carte 32 bits. Nous allons voir que Klipper permet de s'affranchir de ces limitations. 1) Les fonctionnalités de Klipper La particularité de Klipper est d'utiliser un ordinateur hôte pour faire tous ces calculs et de réserver le microcontroleur pour ce qu'il sait bien faire: gérer les entrées-sorties en temps réel. Ceci décharge le microcontroleur qui n'a plus que ça à faire, et l'hôte, qui est généralement un Raspberry Pi 3 avec un processeur ARM quad core, se charge des calculs, avec du multi-thread, plus de mémoire, et une interface graphique plus attrayante. Par ailleurs, Klipper s'interface avec Octoprint, ce qui permet d'utiliser sa partie graphique pour controler l'imprimante. On pourrait meme virer le LCD de l'imprimante et utiliser un écran tactile connecté au Raspberry. Le résultat, c'est un surcroit de performances important. Avec une carte 8-bits, on a des performances supérieures à celles d'une carte 32-bits. Klipper utilise cette puissance pour calculer les trajectoires de façon plus souple, ce qui permet de gagner en précision, en fluidité, en bruit, et en vitesse d'impression. Avec Klipper, j'imprime en 120mm/s sans problème sur une imprimante cartésienne. Il semblerait que les gains sont encore plus importants sur des CoreXY ou Delta. Et bien sûr, une carte 32-bits permettra d'aller encore plus vite, mais on se limite alors à l'énergie cinétique que la mécanique de la machine peut encaisser. Les firmware classiques ont aussi d'autres inconvénients: Ils se configurent en modifiant les fichiers de code source, ce qu'un utilisateur ne devrait jamais avoir à faire. Il faut ensuite les compiler et les flasher à chaque modification. Avec Klipper, on ne touche plus au firmware qui est sur le microcontroleur. Les modifications se font sur un fichier de configuration qui réside sur l'hôte, ce qui est instantané et beaucoup plus pratique. Jusqu'à l'année dernière, Klipper était plutôt expérimental, mais depuis la version de décembre et l'introduction du bed levelling, le support BL Touch, le "pressure advance", la calibration delta, les écrans LCD, les protections thermiques, etc... c'est devenu parfaitement utilisable tous les jours. Il y a deux étapes à l'installation de Klipper: L'installation. C'est la partie la plus facile et on ne la fait qu'une fois. La configuraton. Celle-ce se fait dans un fichier de config. Avec un plugin qui va bien dans Octoprint, on peut éditer ce fichier directement dans Octoprint. 2) Prérequis Avant d'installer Klipper, il vous faut: Une imprimante 3D. Ben oui, c'est pas pour les machines à laver. Il faut pouvoir flasher le firmware, donc on évitera les machines avec un hardware propriétaire. En principe, tout ce qui tourne avec Marlin peut tourner avec Klipper. Un firmware basé sur Marlin. C'est plus simple, parce qu'on pourra récupérer un certain nombre de paramètres. Il est possible de se débrouiller autrement, mais il faudra connaître ou calculer les mm/step etc... Un ordinateur hote sous Linux. Ici, on parlera de Raspberry, mais en théorie ça pourrait fonctionner avec n'importe quel PC sous Linux et Octoprint. Attention, il faut un Raspberry Pi 3 au minimum. Un Raspberry Zero ou un vieux Raspberry 1 vont trop ramer. Octoprint. Je ne vais pas détailler ici l'installation d'Octoprint. Il y a plein de tutos là dessus. On y installer un plugin OctoKlipper qui facilite la configuration de Klipper. Des connaissances (basiques) en Linux. On va utiliser une ligne de commande SSH pour télécharger et installer Klipper. Note importante: Avant de procéder à l'installation de Klipper, assurez-vous bien que tout l'ensemble Imprimante 3D + Octoprint Raspberry fonctionne correctement et est parfaitement maîtrisé. Sinon, si un truc ne marche pas après, on ne pourra pas savoir si ça vient de Klipper ou de la configuration matérielle. 2ème note: Je vous conseille d'avoir toujours une stratégie de repli, autrement dit les moyens de pouvoir reflasher Marlin avec une configuration qui marche si pour une raison ou une autre Klipper ne vous convient pas.1 point
-
IV - Configuration avancée Une fois que vous avez la configuration de base, il est assez facile de rajouter des options supplémentaires. Les exemples que je mets ici sont simplifiés et ne contiennent que les infos de base. D'autres options sont disponibles et documentés dans le fichier examples_extras.cfg. 1) Homing override (pas nécessaire si vous n'avez pas de sonde) C'est l'équivalent du SAFE_HOMING dans Marlin: on veut redéfinir la position de l'opération Home pour s'assurer que la sonde BL Touch ou autre est au dessus du plateau et que la buse ne percute pas le plateau. Dans Klipper, on définit une séquence Gcode à définir lorsque le Home s'applique à un ou plusieurs axes. Voici l'exemple qui marche chez moi, mais qui sera à adapter en fonction du placement de votre sonde par rapport à la buse: [homing_override] axes: z set_position_z: 0.0 gcode: G90 G0 Z5 F600 G28 X0 Y0 G0 X-5 Y10 F3600 G28 Z0 G0 Z5 F600 Explication: axes: définit l'axe sur lequel cet option s'applique. Ici, ça ne va s'appliquer que si on fait Home All ou Home Z. set_position_z: Klipper refuse d'activer la sonde tant qu'on n'a pas défini un 0 pour l'axe. On définit donc le 0 (provisoire) à la position actuelle. gcode: On execute le Gcode suivant: - G90: mode absolu - G0: monter 5mm au dessus (pour s'éloigner du plateau si on est en contact) - G28 X0 Y0: faire un Home sur X et Y - G0 X-5 Y10: mettez ici les coordonnées de la buse pour lesquels la sonde sera au dessus du plateau. - G28 Z0: faire le Home Z - G0 Z5: remonter à 5mm au dessus du plateau pour ne pas rester en contact Vous pouvez bien sûr modifier le Gcode à votre convenance. 2) Bed leveling Klipper propose le nivellage automatique du plateau et la compensation de l'inclinaison avec un capteur (défini dans les sections [bltouch] ou [probe]) Malheureusement, il faut choisir. Donc je choisis plutôt l'option bed leveling. [bed_mesh] speed: 100 probe_count: 3,3 min_point: -5,20 max_point: 160,200 horizontal_move_z: 6 samples: 1 sample_retract_dist: 6 probe_count sera la définition du nombre de points dans la grille de test. min_point et max_point seront les coordonnées de la buse pour que la sonde soit placée dans les coins du plateau. Il faut donc tenir compte de l'offset. samples permet de faire la moyenne entre plusieurs sondages à chaque point de la grille. horizontal_move_z et sample_retract_dist définissent le mouvement en Z à chaque sondage. Pour lancer le bed leveling, Klipper ne connait pas la commande G29 mais utilise la commande BED_MESH_CALIBRATE à la place. Il faut donc taper cette commande dans l'onglet Terminal. On peut aussi très bien créer une macro pour redéfinir G29. 3) Deux moteurs Z Il est facile de rajouter un deuxième moteur sur l'axe Z qui utilise le même endstop, en rajoutant le bloc suivant: [stepper_z1] step_pin: ar36 dir_pin: !ar34 enable_pin: !ar30 step_distance: .00125 Il faut bien-sûr s'assurer que les pins sont corrects. La direction du dir_pin ("!" ou pas) ainsi que le step_distance doivent être les mêmes que dans stepper_z. 4) Commandes Klipper Klipper est globalement compatible avec le Gcode Marlin, c'est à dire que du Gcode généré pour Marlin sera compris par Klipper. Cependant, il y a quelques commandes Marlin qui n'ont pas de sens sous Klipper (les options M50x) ou qui utilisent des commandes différentes (par exemple TURN_OFF_HEATERS au lieu de M108). La liste des commandes Klipper est disponibles ici: https://github.com/KevinOConnor/klipper/blob/master/docs/G-Codes.md La liste des commandes Gcode est ici: https://reprap.org/wiki/G-code Vous pouvez aussi taper HELP dans le Terminal pour obtenir la liste des commandes de Klipper. 5) Macros Il est possible de créer ses propres commandes ou raccourcis Gcode avec Klipper. On peut ensuite inclure la nouvelle commande dans son Gcode ou le taper dans l'onglet Terminal. La syntaxe est la suivante: [gcode_macro <nom de la macro>] gcode: <Gcode> On peut, par exemple, créer des commandes Gcode Marlin qui n'existent pas dans Klipper, ou créer des macros pour insérer le Start Gcode ou End Gcode du slicer directement dans Klipper. Par exemple, avec la configuration suivante, on peut mettre simplement les commandes START_PRINT et END_PRINT dans Cura et Klipper s'occupera d'effectuer les actions en début et en fin d'impression: [gcode_macro G29] gcode: BED_MESH_CALIBRATE [gcode_macro PURGE] gcode: M117 Purging... G1 X0 Y3 Z.10 F3600 G92 E0 G1 X40 E10 F500 G92 E0 G1 E-2 F500 G1 X80 F4000 G1 Z0.3 [gcode_macro START_PRINT] gcode: M117 Bed leveling... G90 G21 M82 M107 G28 G29 PURGE [gcode_macro END_PRINT] gcode: M104 S0 M140 S0 G91 G1 E-1 F300 G0 Z+2 E-5 F600 G90 G0 X-5 Y200 F3600 M84 6) Calibration du PID Le PID, c'est l'algorithme qui va contrôler la stabilité de température. Un PID mal calibré va donner une température qui va osciller entre une valeur au dessus et en dessous de la consigne. Pour calibrer le PID, on va lancer une calibration avec la commande suivante dans l'ongler Terminal: PID_CALIBRATE HEATER=extruder TARGET=200 Klipper va faire lancer plusieurs cycles de température à 200°C et à la fin va lister les valeurs pid_Kp, pid_Ki et pid_Kd dans le terminal. Il suffit de copier ces valeurs dans la section [extruder] du fichier de config. Vous pouvez faire la même opération sur heater_bed. 7) Pressure Advance Cette option est similaire au "Linear Advance" de Marlin. Elle permet de régler de façon dynamique le débit de la buse en fonction de la vitesse et de l'accélération de la tête. Sans cette option, par défaut, si vous faites un carré, il va y avoir une accumulation de matière dans les coins qui former une espèce de bourrelet vertical dans les coins. Pour trouver la valeur optimale, on commence par régler la valeur à 0 en rajoutant la ligne pressure_advance dans le fichier de config: [extruder] pressure_advance: 0.000 Taper les commandes suivantes pour ralentir la tête dans les coins, ce qui va accentuer le problème pour mieux voir les effets: SET_VELOCITY_LIMIT SQUARE_CORNER_VELOCITY=1 ACCEL=500 SET_PRESSURE_ADVANCE ADVANCE_LOOKAHEAD_TIME=0 Imprimer l'objet test (à télécharger depuis https://github.com/KevinOConnor/klipper/blob/master/docs/prints/square.stl), à une vitesse rapide (100 mm/s) et une hauteur de couche à 0.2 mm. Ensuite, recommencer avec une valeur de 1.000, 0.500, etc... et affiner pour obtenir le meilleur résultat.1 point
-
II - Configuration de base La configuration, pour la majeur partie, va se faire par tatonnement. On va modifier une configuration, sauvegarder, et voir si ça marche... On va généralement partir d'une configuration standard, mais il faudra souvent affiner ou modifer des trucs. Donc, plutôt que d'expliquer chaque paramètre, je vais vous expliquer les grands principes pour que vous vous débrouilliez vous-mêmes. Chaque option est expliquée dans le fichier example.cfg dans le dossier config. Les options avancées (bed levelling, macros gcode, etc...) sont expliquées dans le fichier example_extras.cfg. 1) Choix du fichier de configuration Ici, on a plusieurs possibilités: Si votre imprimante est "standard", vous pouvez récupérer une configuration toute faite, et éventuellement la modifier. Si, comme moi, votre machine est faite de bric et de broc, il faudra faire un peu plus de modifs sur un fichier existant ou partir du fichier par défaut (example.cfg). Il y a aussi des exemples pour des CoreXY et Delta. Pour voir les le fichiers de configuration disponibles, entrer la commande suivante: ls -l ~/klipper/config/ On peut aussi voir les fichiers ici: https://github.com/KevinOConnor/klipper/tree/master/config Une fois que vous avez choisi le fichier de config qui se rapproche le plus de votre configuration, entrer la commande suivante: cp ~/klipper/config/example.cfg ~/printer.cfg Ceci va copier le fichier et le renommer printer.cfg. C'est sur celui-ci qu'on va travailler. Maintenant, on peut quitter la ligne de commande. Le reste de la configuration se fera dans Octoprint dans Settings > OctoKlipper > Klipper Configuration. Vous devez maintenant y voir le contenu du fichier. 2) Principes de la configuration Le fichier de configuration est composé de blocs. Certains sont obligatoires d'autres optionnels. Chaque bloc commence par un titre entre crochets (par exemple [printer]) Les pins de la carte se définissent avec la syntaxe suivante: pin: <numéro> On utilise le préfixe "!" pour inverser la logique, par exemple pour inverser le sens de rotation d'un moteur (l'équivalent des variables INVERT dans Marlin) On utilise le préfixe "^" pour utiliser la résistance en entrée, par exemple pour les switchs end stop. Si on utilise les deux préfixes, le "^" doit précéder le "!". Par exemple, dans la définition de l'écran on pourra trouver: encoder_pins: ^ar31, ^ar33 click_pin: ^!ar35 kill_pin: ^!ar41 Si vous avez un doute sur la numérotation des pins, regardez un schéma, par exemple ici: https://www.reprap.org/wiki/RepRap 3) Définir le microcontrôleur Ce bloc définit le type de et le port. Sur serial, mettre le port utilisé à l'origine par Octoprint pour se connecter à l'imprimante. [mcu] serial: /dev/ttyUSB0 4) Définir les mm/step C'est ici qu'on va utiliser les valeurs récupérées dans Marlin, principalement les valeurs indiquées sous Steps per unit. Important: Marlin utilise l'unité steps/mm et Klipper utilise des mm/step. Il faut donc inverser (1/x) toutes les valeurs par rapport à Marlin. Par conséquent, là où on aura une valeur 200 dans Marlin, il faudra utiliser 1/200 = 0.005 dans Klipper. Donc on va changer les lignes suivantes dans Klipper [stepper_x] ... step_distance: 0.005 ... [stepper_y] ... step_distance: 0.005 ... [stepper_y] ... step_distance: 0.005 ... [extruder] ... step_distance: .001265 La valeur dans [extruder] sera la valeur à modifier pour calibrer l'extrudeur. On procédera de la même manière que sous Marlin (une règle de trois en mesurant le filament qui sort de l'extrudeur), mais an appliquant l'opération 1/x. 5) BLTouch et autres capteurs Les BLTouch ou 3D Touch ou autres capteurs nécessitent beaucoup d'essais. Je conseille d'utiliser un switch endstop classique pour commencer, et de passer au capteur Z une fois que tout le reste est configuré. Pour le BLTouch, dans la section [stepper_z] il faut supprimer la ligne position_endstop et modifier la ligne endstop_pin endstop_pin: probe:z_virtual_endstop #endstop_pin: ^ar18 #position_endstop: 0 Il faut ensuite rajouter une section [bltouch] ou [probe] et renseigner le x, y, z_offset par rapport à la buse. Ca doit etre les mêmes valeurs que dans Marlin. Par exemple: [bltouch] sensor_pin: ^ar18 control_pin: ar11 pin_move_time: 0.2 x_offset: 32 y_offset: 0 # Increase Z_Offset to lower nozzle closer to bed. PLA 2.6 z_offset: 2.7 speed: 60 La section [probe] pour les autres capteurs est un peu plus compliquée. Je vous conseille de regarder le fichier example_extras.cfg pour plus d'informations. Augmenter la valeur z_offset va descendre la buse plus près du bed. Réduire la valeur mettra plus de distance. Attention: Pour un 3D Touch ou clone de BL Touch, il faut rajouter les lignes suivantes: pin_up_reports_not_triggered: False pin_up_touch_mode_reports_triggered: False 6) Ecrans LCD Le fichier examples_extras.cfg contient les configurations pour la plupart des écrans LCD courants. En principe, il suffit de copier/coller la section qui vous concerne. 7) Tester la configuration. Dans Klipper, à chaque fois que vous sauvegardez la configuration, il faut redémarrer Klipper. Si vous utilisez OctoKlipper, il le fait automatiquement, sinon vous pouvez le faire manuellement en tapant FIRMWARE_RESTART dans l'onglet terminal ou la commande suivante en SSH: sudo service klipper restart En principe, le terminal doit envoyer régulièrement une ligne avec les températures. Si ce n'est pas le cas, vérifier les paramètres des pins pour les blocs [heater_bed] et [extruder]. Si les tempétures sont bien renvoyées, la première chose à faire est de taper une commande Gcode dans le terminal. Par exemple STATUS. S'il y a une erreur de syntaxe, ça enverra un message d'erreur avec un indice sur ce qu'il faut corriger. S'il n'y a pas de message d'erreur, je vous conseille de procéder progressivement pour vérifier que tout est correctement branché: Dans l'onglet Control, tester les axes X, Y, Z pour vérifier qu'ils se déplacent correctement dans les bons sens. Si ce n'est pas le cas, inverser les paramètres dir_pin en ajoutant ou supprimant le "!". Si le moteur ne répond pas du tout, vérifier que les bons pins sont renseignés dans step_pin et dir_pin. S'ils marchent, commencer par un Home All. Si les endstops ne marchent pas, vérifier les valeurs de endstop_pin. Vérifier la chauffe de la buse et du bed. Une fois que la buse est chaude, essayer l'extrudeur, et si nécessaire, le calibrer avec la méthode habituelle. L'extrudeur ne marchera pas si la buse n'est pas chaude. Si tout ceci fonctionne, vous pouvez lancer une premier impression de test. Là, vous avez les billes pour démarrer et avoir une imprimante fonctionnelle. Dans la section suivante, on couvrira les options de configuration supplémentaires.1 point
-
II - L'installation L'installation est la partie la plus simple. Il suffit de suivre les étapes, sans trop réfléchir. 1) Récuperer les paramètres de Marlin On part du principe qu'on a une installation Marlin qui fonctionne. On peut donc récupérer un certain nombre de données qui nous aideront à configurer Klipper. Aller dans Octoprint et connecter l'imprimante. Aller sur l'ongler Terminal et entrer M503. Ca va lister toute une série de lignes qui commencent par echo. Copier le résultat du M503 et coller ce contenu dans un fichier texte à sauvegarder. On y reviendra plus tard. 2) Noter le port L'imprimante est généralement connectée au Raspberry par le port /dev/ttyUSB0 ou /dev/ttyACM0 (ça dépend des machines). Regarder les options de connexion d'Octoprint Noter le port sur lequel Octoprint se connecte à l'imprimante. 3) Télécharger Klipper Ceci va télécharger et installer le logiciel hôte Klipper (la partie qui s'installe sur le Raspberry). Se connecter au Raspberry en SSH (user: pi et password: raspberry si vous ne l'avez pas changé - je vous conseille de le changer avec passwd ou raspi-config) Entrer les deux commandes suivantes: git clone https://github.com/KevinOConnor/klipper ./klipper/scripts/install-octopi.sh 4) Flasher le firmware sur le microcontroleur Taper les commandes suivantes: cd ~/klipper/ make menuconfig Ceci ouvre un menu qui permet de régler les options de compilation. Choisissez d'abord le microcontrôleur. Si vous avez un Arduino/RAMPS ou dérivé (Anet, MKS Gen, etc...), laisser par défaut. Sinon, si vous avez une carte un peu plus exotique (32 bits ou autres...) il faudra plonger dans les options. Sélectionner Save puis Exit. Entrer la commande suivante make Et enfin, on va flasher le firmware avec les commandes suivantes: sudo service octoprint stop sudo service klipper stop make flash FLASH_DEVICE=<port> sudo service klipper start sudo service octoprint start Remplacer <port> par le port que vous avez noté, par exemple /dev/ttyUSB0 ou /dev/ttyACM0. Attention: Sur les cartes Anet, il faut utiliser la commande suivante à la place de make flash: avrdude -p atmega1284p -c arduino -b 57600 -P /dev/ttyUSB0 -U out/klipper.elf.hex 5) Installer le plugin OctoKlipper Ce plugin va nous faciliter la vie en permettant, parmi d'autres choses, d'éditer la configuration de Klipper à travers l'interface web. Dans Octoprint, aller dans Settings > Plugin Manager et cliquer sur Get More. Rechercher le plugin OctoKlipper et Installer. A partir de maintenant, Octoprint va se connecter à une imprimante virtuelle Klipper /tmp/printer au lieu de l'imprimante physique. Si ce n'est pas déjà configuré, modifier les options de connection.1 point