Classement



Contenu populaire
Contenu avec la plus haute réputation dans 07/05/2019 Dans tous les contenus
-
Mettre 900€ dans ce type de machine et la bidouiller de partout je vois franchement pas l’intérêt (à part perdre la garantie). Autant sur une machine d'occasion ou en panne payée à petit prix, ça se justifie, sinon autant prendre autre chose. Le but de ce type de machine, c'est justement de ne pas mettre les mains sous le capot.3 points
-
@Hobi et @Epsylon3 essaient de donner un peu de souffle aux ressources hardware. Hésite pas à partager tes feedback. EDIT : Grilled2 points
-
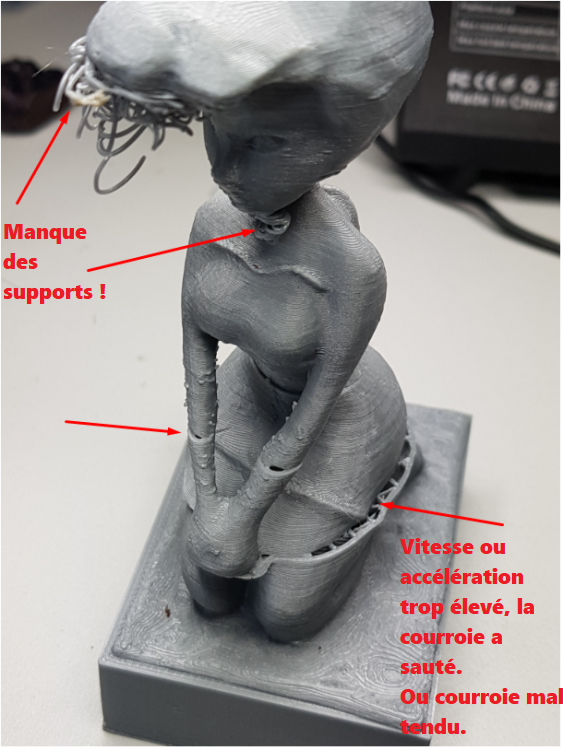
Bhein on a amélioré le score mais c’est pas parfait . Les petits chocs peuvent être des gros... c est les mêmes. Donc cherche pas à aller trop vite!2 points
-
Prenons un endstop (=un interrupteur momentané). Les seuls retours possibles sont ouvert/fermé. Deux états simples, ce n'est pas compliqué à récupérer pour un microcontrôleur. Prenons une thermistance. Les retours possibles sont "rien, un peu, ... beaucoup, tout" (pour être précis 0...1023, sans unité). C'est le montage électronique, la datasheet et des mathématiques qui permettent d'en déduire des °C. Mais là encore le microcontrôleur est capable de gèrer. Prenons l'exemple du Multi Material 2.0 (MMU2) de Prusa. Il gère les différents moteurs du produit, la rétraction, le changement de filament. Il doit pouvoir recevoir l'ordre de la carte principale pour ce changement de filament d'après le GCODE lu. Quel filament sélectionner. Il doit pouvoir dire à la carte principale quand est-ce qu'il a fini, s'il a eu un soucis, etc. Concrètement on pourrait gérer ça avec pleins de fils qui ne transmettent que des valeurs oui/non ou 0...1023 mais ça serait vite compliqué. Le MMU2 comme les TMC2208 utilisent le protocole UART. Il suffit de 2 fils pour communiquer (en réalité 4 avec l'alimentation +/-) et s'envoyer plein d'informations plus ou moins complexes. Le tout est de parler la même langue et sur le même support, c'est là qu'intervient le protocole. J'imagine que quand tu communiques avec tes parents, s'ils te parlent de vive voix en français, tu ne va pas leur répondre par mail et en anglais. Comme les mails et le fait de parler de vive voix les protocoles ont leur spécificités propre parmi la rapidité, la capacité de communiquer avec un destinataire loin ou proche, le fait que ça s'adresse à un destinataires unique, ou à plusieurs, le mode de sélection de ce destinataire, etc. Il existe donc plusieurs protocoles dont les plus courants en Arduino/Impression 3D sont SPI, I2C, UART. L'UART par exemple ne peut relier que deux correspondants. Le capteur de filament de Prusa fonctionne avec I2C qui est un protocol plus lent mais à partir des deux fils (4 en réalité avec +/-) on peut brancher autant de destinataire que nécessaire si leur adresse est différente: on imaginer relier sur ces mêmes fils le capteur prusa filament, un capteur de température+humidité, un écran oled, etc. Les TMC2130 utilisent le SPI qui est très rapide mais est sensible à la distance. Je ne rentre pas plus dans les détails, les connaisseurs relèveront pleins de raccourcis et d'imprécisions dans mes propos. Mais c'est pour que tu te fasse une idée. Il y a beaucoup de petites choses à savoir pour pouvoir utiliser ces protocoles correctement. Les liens Wikipedia de @Janpolanton sont instructifs.2 points
-
Je viens de voir ça Ça marche merci. EDIT : Construction du tuto Touch-mi en cours avec @sensei73. Comme pour le BL-Touch, il nous faudra des retours de bêtas testeurs pour tout valider donc hésitez pas en étant le plus complet possible2 points
-
bon aujourd'hui plus calme, j'ai nettoyé un peu pour mettre les nouveaux define dma une seule fois dans le board pins.h restera tout le (sous) projet de calibration à nettoyer/adapter aussi pour reduire le code en double. Sinon oui tu peux compiler/utiliser pas de soucis2 points
-
Première couche mal réglée, pas assez écrasée.... la vie c'est pas compliqué !2 points
-
Regarde ici En plus, y'a plein de choses intéressantes sur ce site1 point
-
Salut, C'est stupéfiant...1 point
-
si on peut aider, n'hesite pas ! mais la pour ce dont tu parles .... aucune idée de quoi tu parles ! mais je pense qu'on est nombreux dernières toi et @Epsylon3 et les autres qui participe aux dev ! cheer mate !1 point
-
Oui. Les modes UART et SPI servent surtout à configurer à la volée les TMC: courant, micropas, mode silencieux ou coupleux, etc et renvoient leurs paramètres. Pour l'instant à ma connaissances c'est tout.1 point
-
Boh ça c'est les goûts et les couleurs.. Si certains ne pensent qu utile, d'autres pensent fantaisie ou plaisir, on ne peut pas reprocher ça.1 point
-
T'es encore sous Vista !!!1 point
-
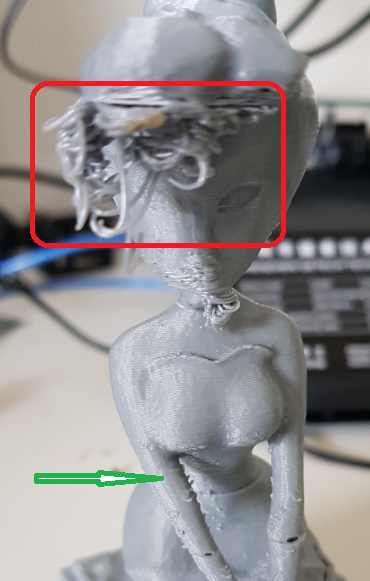
Dans l'encadré rouge, trop de ventilation du filament, sa permanente n'a pas tenu La flèche verte, c'est juste pour remarquer que normalement les mannequins anorexiques n'ont plus le droit de défiler. (c'était de l'humour hein ).

 1 point
1 point -
https://www.creality3d.cn/creality-cr-10s-pro-3d-printer-p00253p1.html1 point
-
J'ai fais la mise à jour de l'écran mais on ne voit pas de différence avec l'ancienne version.1 point
-
De rien. C'est le principe du forum: aider quand on le peut . Pour remercier un contributeur, tu peux aussi cliquer sur le cœur au bas de son post (il offre aussi d'autres possibilités ). Ça permet de réagir / d'indiquer son "opinion" sans forcément devoir compléter par écrit un post.
 1 point
1 point -
Même pas. J'ai laissé par défaut. J'aurais dû ????? Je vais ptêt le faire, alors. C'est ça : #define INVERT_X_DIR false // was true for original stepsticks jcg #define INVERT_Y_DIR false // was true for original stepsticks jcg #define INVERT_Z_DIR false // was true for original stepsticks jcg1 point
-
Bonjour à tous, petite incruste dans votre topic car le sujet me titille aussi ... beaucoup ... Au cas ou , voici une video ou le gars explique le coup du palpage , et comment le limiter à la surface utile du CI à graver. Bien entendu , sa machine est une hypercube modifiée , sous Marlin , et les pinces croco sur la broche et le CI se subsitue au capteur fin de course Z pour faire le zero . Ca se passe vers les 12"30 environ .1 point
-
Je sais pas et je m'en fous. (bon j'exagère un peu, là., faudrait que je m'y intéresse , camême...) J'ai enlevé les 4988 d'origine et mis les zôtres à la place, sans rien changer d'autre que le sens des mouvements dans Marlin. Ça marche, fin de l'histoire.....1 point
-
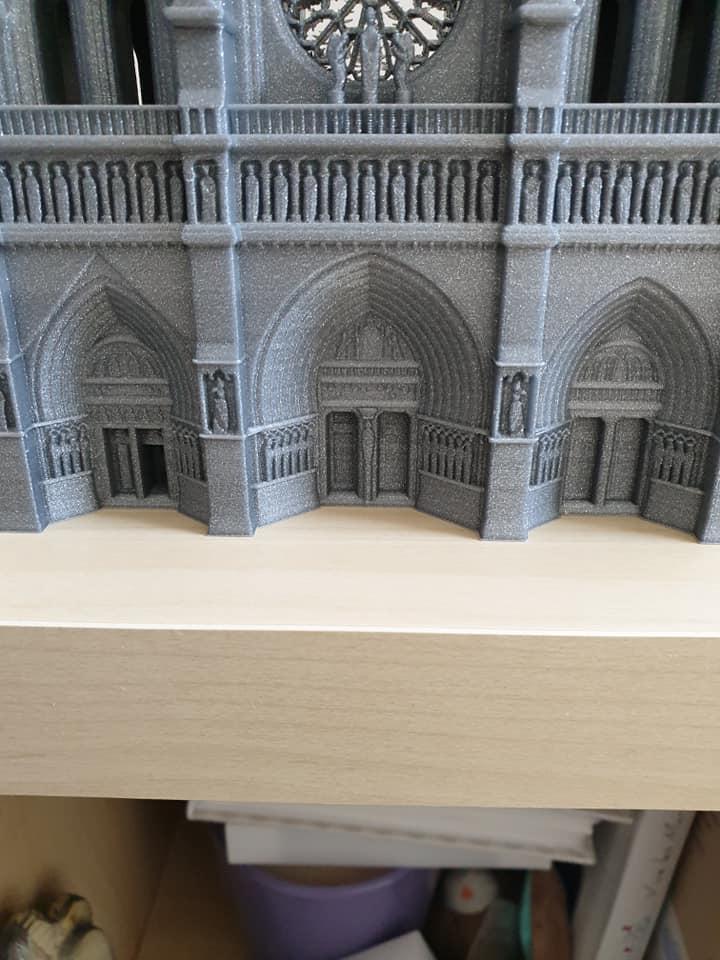
ton leveling a l'air pas trop mal néanmoins pour t'en assurer je placerai la tete à cet endroit et tu test le coup du papier au endroit ou c'est moche il faut savoir que les bed d'origine sont rarement plat et on parle evidement de difference invisible à l'oeil nu (100nm = 1 couche). On a l'impression que ta buse racle par endroit et pas d'autre. un autre probleme peut etre un flow trop elevé (trop de plastique extrudé qui du coup bave un peu). tu as plein de tuto sur le net pour t'aider à le regler, comme ici par exemple: https://filament2print.com/fr/blog/33_flow-impression-3d.html personnellement en voyant ton print, je penche pour un mix des 2 : plateau pas parfaitement plat à cet endroit et peut etre un poil trop de plastique (peut etre pas, mais je le verifierai).1 point
-
si tu ne te sens pas à bidouiller un peu, en effet attend encore que la version soit stable, mais il faut savoir que le flash alfawise => Marlin ou Marlin => alfawise se fait tres simplement via sd card comme une update classique donc tu peux faire des tests puis revenir au firmware d'origine pour tes prints (il faut par contre refaire tes settings de firmware si tu en as modifié). PAr contre ils travaillent encore sur quelques bugs donc je te conseil d'attendre sauf si tu es curieux de jouer avec Marlin (qui permet par exemple d'avoir un bltouch et donc un autoleveling ) Marlin permet vraiment d'augmenter la qualité et la vitesse sous reserve de prendre un peu de temps pour bidouiller les settings c'est surtout @CacaoTor pour les analyses et la communauté pour Marlin qu'il faut remercier, moi je n'ai que communiqué les liens1 point
-
avec le déport du plateau il faut partir sur 67*54 ...1 point
-
Je pige mieux toussa, merci. C'est bien foutu camême, hein @Guillaume3D ? Non, toutes façons je vais monter des TB6600 Ceux-là >>>> Y'a plus que ça que j'attends. Ce matin je pose la question pourquoi ça arrive pas Ah, on a perdu votre colis..... GRRRR !1 point
-
En fait, je pense même qu'un "sensorless" est moins barbare qu'un endstop, j'explique ma pensée : Un sensorless, comme le dit @Janpolanton, détecte une perte de pas, donc à la résolution angulaire du moteur, et ceci, immédiatement. Le moteur est ainsi stoppé instantanément, et ne vient pas forcer en butée mécanique. Un mécanisme à endstop mécanique quant à lui va prendre un certain temps, entre la détection du switch, le filtrage anti-rebonds (si tant est qu'il y en ait un, mais ce serait une hérésie de ne pas en mettre sur un switch mécanique...) et la commande de l'arrêt du moteur (avec ou sans décélération). Et ainsi le moteur à encore le temps d'aller se crasher contre le pauvre endstop avant qu'on ne lui coupe la chique. La douceur dans cette barbarie vient du fait qu'il reste un pouillème de course entre la détection par le endstop et la butée mécanique. Et pour la merdouille qui bloque, t'es bien content que la machine puisse détecter quand c'est ta mimine, ou la pincette que tu laisse trainer par là en tentant d'enlever une cochonnerie collé sur la buse en cours d'impression.1 point
-
tu vas dans le terminal dans le dossier du projet et : git pull --rebase ou au pire (avec perte de modifs locales) git fetch origin git reset --hard origin/master @Hobi ce G2 n'est pas inclus pour nous ... et c'est pas notre partie de code pour les PRs1 point
-
ou reduire le jerk Y sinon... j'ai pas touché aux vref perso, mais U301 point
-
En regardant vite fait, ça détecte la perte de pas et il y a un paramètre "sensibilité" à configurer dans marlin Doc Trinamic 1 Note d'application Trinamic De la bonne lecture bien "prise de tête" en perspective... Allez Guigui, go! go! go!1 point
-
Va falloir que je lise aussi dans l'autre diagonale pour te répondre plus précisément, mais il y a de ça en effet Par contre les drivers "sensor less", ce sont apparemment les TMC2130
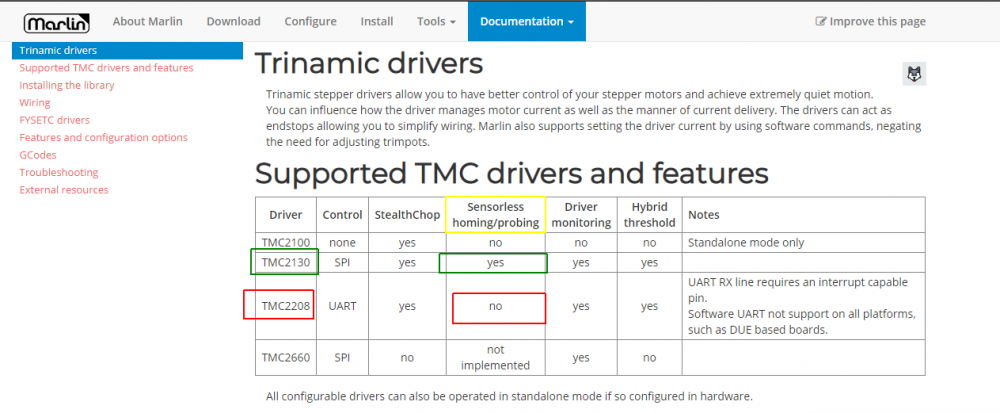 1 point
1 point -
C'est bien il y a du mieux ! Pour tes petits soucis : J'ai noté sur l'image ce qu'il faut regarder. Etant donné que tu as changé la carte... il faudrait que tu regarde du côté des réglages... et donc voici une petite vidéo, que je te recommande de regarder concernant des réglages à effectuer : Et n'oublie pas dans tes messages avec le support Geetech de leur dire qu'en remplaçant la carte, cela a résolu ton "gros problème" et que le soucis venait de là. Si tu as de la chance comme moi, ils t'en enverront une gratuitement... et tu en auras une d'avance... si cela se reproduit.
 1 point
1 point -
Po'v Guigui, personne lui répond sur son dilemme Uartésien... Faudra quand même que je me plonge sérieusement dans l'étude de cette "datasheet" un de ces 4 matins si jamais je songeais à remplacer mes drivers.1 point
-
Pas besoin de discuter avec des experts , un simple M48 et t'auras ta réponse sur la répétabilité du capteur. Mais que ce soit sur le X,Y et Z , la position c'est en rapport a une référence, que ce soit le BL Touc,le TouchMi ,le 3D touch on est tous au meme niveau. La position on ne la connait qu'une fois une home fait et avant c'est impssible. Qui sont les "nombreux " bousilleurs" ? Ben c'est pareil pour le TouchMi ,une fois le Z offset fait, si tu ne démontes rien ça bouge pas1 point
-
Ne te référe pas a cette video, il ne met pas en oeuvre le capteur correctement, pas d'offset, il n'as pas le menu ,etc...... a 12 min. il crash le capteur, enfin bref ..... c'est dommage que les Youtuber's diffuse des videos avant même d'être venu voir le constructeur quand il rencontre un problème. Beaucoup l'ont ce capteur et y a pas de soucis et même si il y a un problème, je suis la, y a qu'a voir sur le forum !1 point
-
Bonjour, C'est une mauvaise solution qui dans l'absolu ne peut fonctionner correctement que si les 2 ventilateurs sont parfaitement identiques.1 point
-
T'as viré le software endstop?1 point
-
Bonjour, J'ai acheté une tronxy x5s-2e en sachant ce qu elle valait. par contre vendu pour une core XY et a mon étonnement je vois une H-bot 'deja mal parti' opposition des forces mettent l axe en crabe. pièces de tension en plastique. pas terrible pour être précis. - j'ai donc dessiné les pieces qui recoivent les poulies, passage en core XY par la meme ocasion et les support moteurs. -découpe des pièces au jet d’eau dans de l'alu de 6mm - changer les poulies par des crantée . Pour ma part je suis fan de smoothieboard, donc j'ai vire l"électronique d origine. pour ceux qui veulent modifié le firmware d'origine, chercher du coter de ChiTu F mini http://www.cbd-3d.com/en/prod/fdmmini.shtml1 point
-
Premier message, douzils l'a déjà changé ... ce serait pas de bol. un problème de branchement avec un cours circuit entre un cable du ventilo et un cable de la thermistance de la buse ?1 point
-
C'est pour fran6p .1 point
-
oui mais sur l'U20 avec Marlin le baudrate est bien à 250k. voir le sujet dédié écrit par @CacaoTor justement voir aussi le sujet créé par @CacaoTor sur cette histoire de baudrate problématique : quand je vois tes photos je penche pour un probleme de leveling et/ou de flowrate (trop de filament ?) pour les bulles/marques, est ce que tu as le z hop d'activé ? cette option a la facheuse habitude de faire ce genre de défaut1 point
-
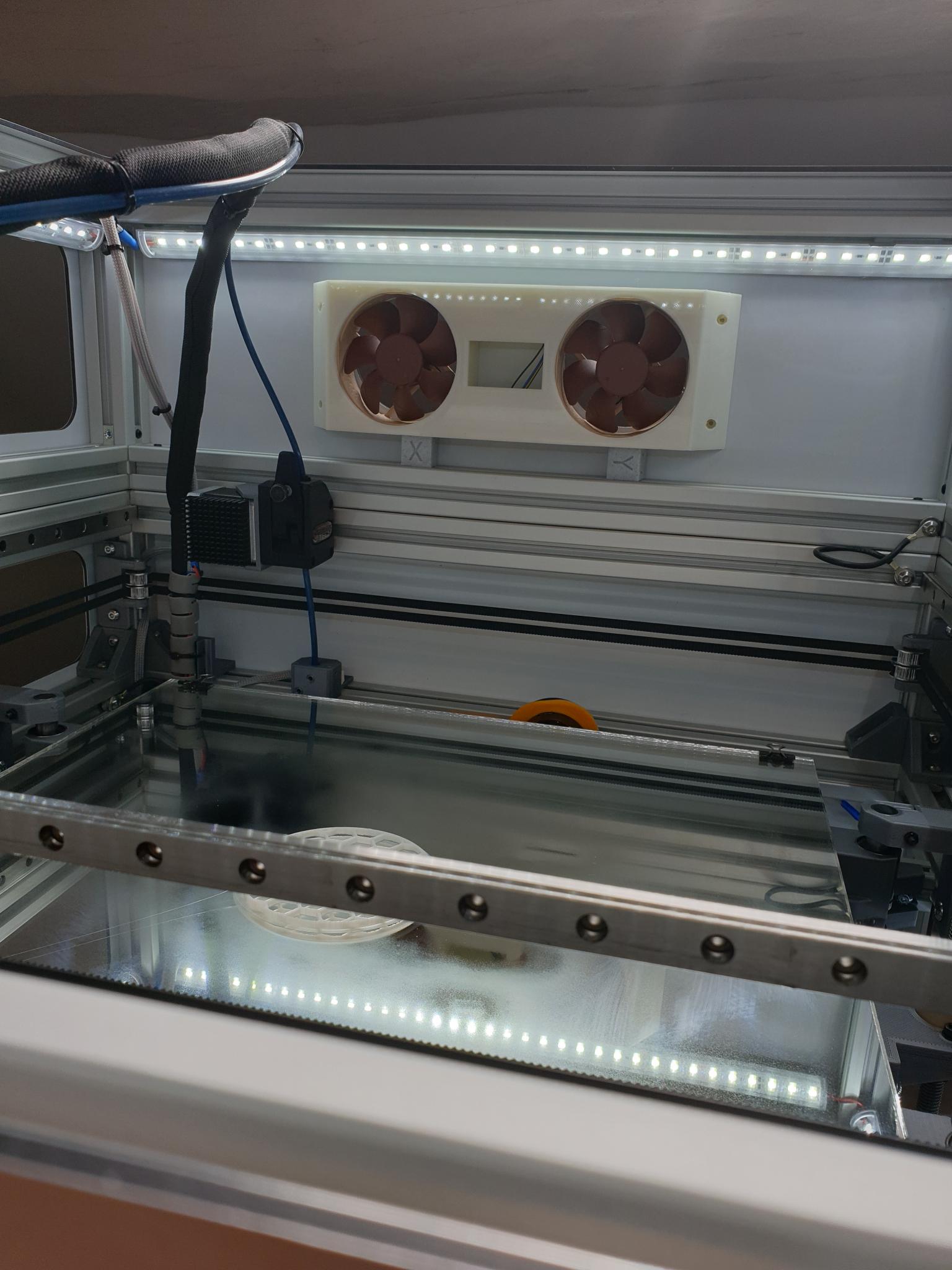
salut a tous, des nouvelles du bébé, elle est enfin fini et elle imprime super bien, je suis hyper fiere de ma creation j'ai printé notre dame de paris, c'est une bonne piece pour tester les capacités de la machine, elle s'en sort tres bien j'aurais 1 an et pas mal d'argent pour la monter mais au final ca a valu le coup







 1 point
1 point -
+1 pour vis-express. Même si je n'ai besoin que d'une vis, je les commande par paquet pour les futures projets.1 point
-
Hello, J'ai souvent commandé sur vis-express.fr Ils ont un gros choix et sont rapide.1 point
-
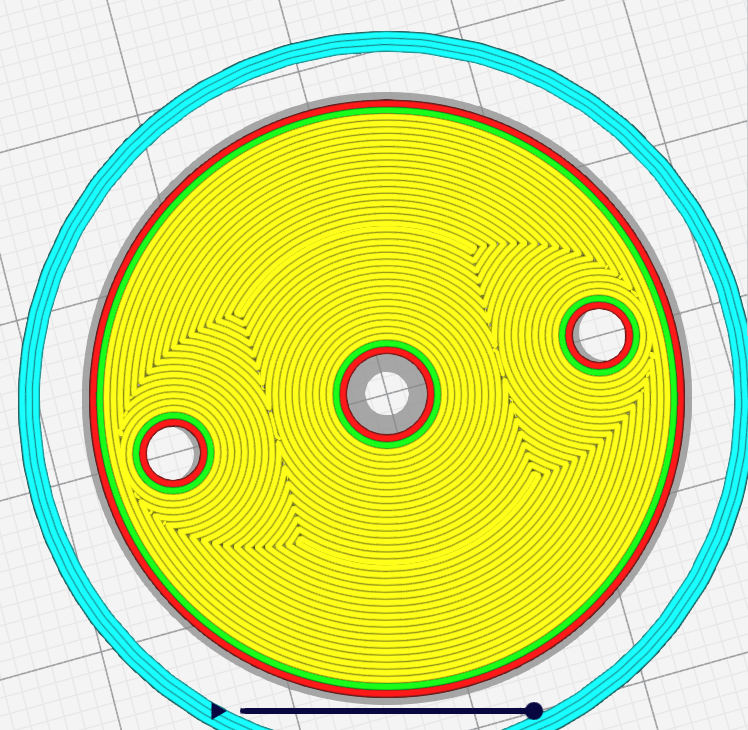
Hello, Voilà un bail que je n'avais pas rencontré ce problème, mais le revoilà... J'essaie d'imprimer cette pièce (en 8 exemplaires en oneshot). Alors que, sauf erreur de ma part et mes yeux déjà passés au laser, les bords sont parfaitement lisse et cylindrique sur le STL. l'imprimante elle m'imprime des bords dentelés, comme si j'imprimant des knobs avec plein de petites rainures pour bien prendre en main. J'ai le problème avec "toutes" les version de Cura (3.5.x, 3.6.x, 4.0.x), et j'utilise le même profil pour mes impressions standards. Je suis sous Octopi. Quand on observe les mouvements des axes, ont vois clairement que ce n'est pas un défaut d'extrusion, mais que les déplacements sont voulus pour dessiner de la sorte... Quelqu'un a déjà eu ce problème ? Une idée ? Merci d'avance EDIT : La vue dans le slicer : Update 05/03/2019 : Etant donné où mènent les différentes pistes de recherches, je renomme ce topic qui deviendra surement un tuto.


 1 point
1 point -
Bonjour à tous ! Bonjour @Fourmi !! Je suppose que malgré mes nombreux messages, (854) vous devinez que je ne suis pas un expert en impression, même si maintenant je me débrouille ! Allez j'ai fini ! je vient de terminer de configurer mon Touchmi avec l'aide de @Fourmi !! j'avais juste une erreur de false et true dans mon marlin ! Je vient de finir 3 impressions avec "l'engin " ! ben je ne voit absolument pas comment on peut "bousiller " du matériel ! Je me posais justement la question !! en fin d'impression la tête retourne en home X et ça fait descendre le pin ! je me suis dit aie ! à la prochaine impression ça va coincer !! Ben non !! y'a mieux dès la fin de la chauffe du bed la tête monte de 20mm et repart vers le centre et commence à palper le centre et après les 9 palpages !! une fois fait le dernier palpage la tête attend gentiment que la buse soit chaude, descend à zéro le pin remonte et c'est parti !! yess ! Hervé0 points














.thumb.jpeg.9a4019c4378b9b868774b9f3b684a811.jpeg)